
一种基于车载雷达信号的动态灯光调节系统及处理方法.pdf

莉娜****ua


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于车载雷达信号的动态灯光调节系统及处理方法.pdf
本发明提供一种基于车载雷达信号的动态灯光调节系统及处理方法,包括车载雷达、电子控制单元和车灯,所述车灯分为头灯和尾灯,头灯和尾灯分别安装在车身前后预留的车灯安装位置,电子控制单元安装在驾驶员侧方向盘下方,车载雷达安装在车身前后保险杠上,或者安装在头灯和尾灯上面,安装在车身前部的雷达检测范围为角度定义坐标系的上半区域,即‑90°~0°,0°~90°,覆盖了头灯的灯光照射区域;安装在车身后部的雷达检测范围为角度定义坐标系的下半区域,即‑90°~‑180°,‑180°~90°,覆盖了尾灯的灯光照射区域,给车辆附
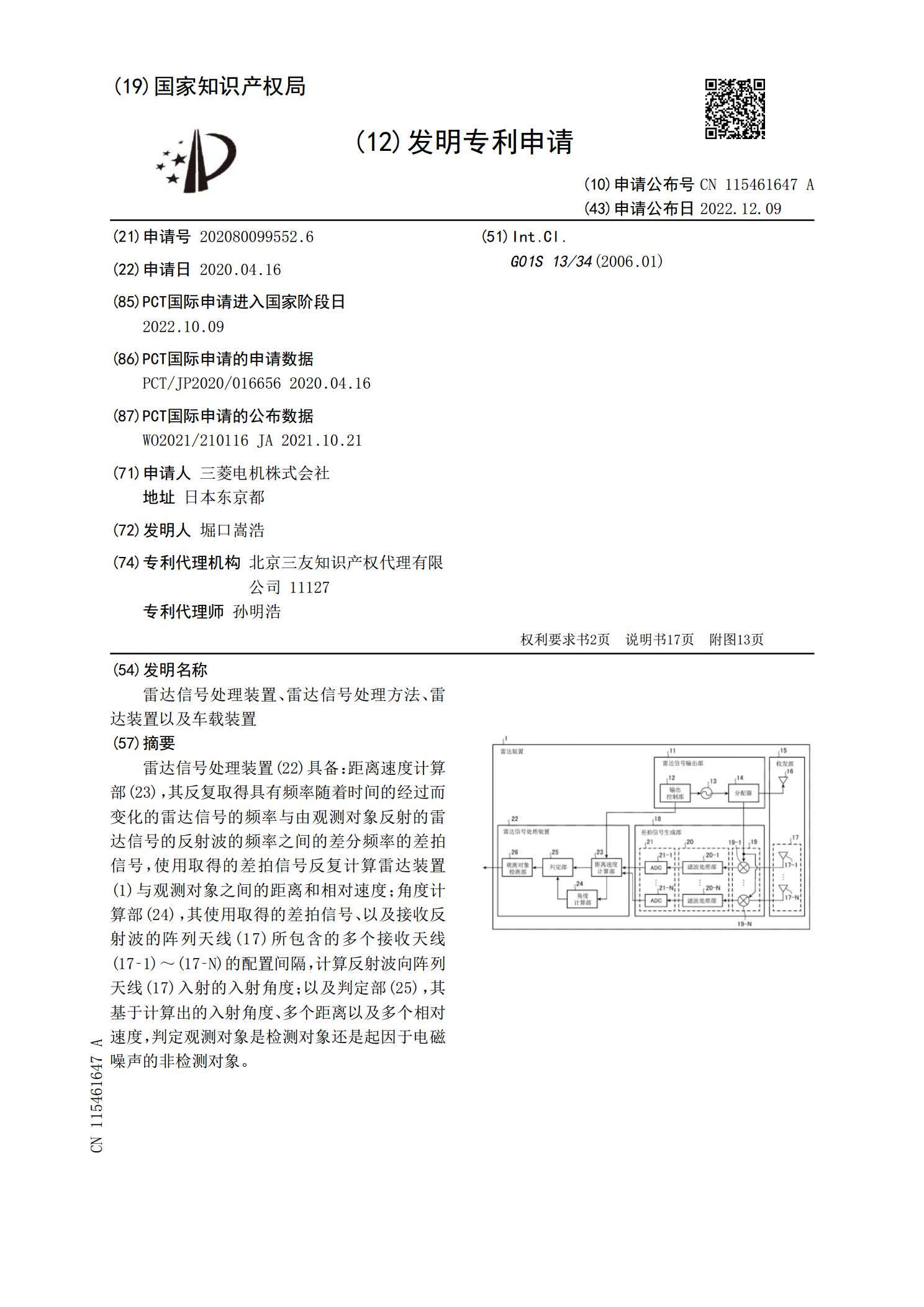
雷达信号处理装置、雷达信号处理方法、雷达装置以及车载装置.pdf
雷达信号处理装置(22)具备:距离速度计算部(23),其反复取得具有频率随着时间的经过而变化的雷达信号的频率与由观测对象反射的雷达信号的反射波的频率之间的差分频率的差拍信号,使用取得的差拍信号反复计算雷达装置(1)与观测对象之间的距离和相对速度;角度计算部(24),其使用取得的差拍信号、以及接收反射波的阵列天线(17)所包含的多个接收天线(17?1)~(17?N)的配置间隔,计算反射波向阵列天线(17)入射的入射角度;以及判定部(25),其基于计算出的入射角度、多个距离以及多个相对速度,判定观测对象是检测

车载近程雷达系统回波信号处理.docx
车载近程雷达系统回波信号处理随着汽车的智能化和自动化迅速发展,车载雷达系统被广泛应用于车辆的自动驾驶、自动泊车、车距控制等领域。近程雷达系统作为其中的一种,主要应用于车辆的行人检测、障碍物检测、自适应巡航等方面。本文将对车载近程雷达系统回波信号处理的方法进行探讨。一、近程雷达系统的工作原理近程雷达系统是通过发射一定频率的电磁波,将电磁波发射到目标物上,并通过接收目标物反射回来的电磁波信号来进行目标物检测的。雷达系统将电磁波发射出去,通过天线接收反射回来的信号,并将信号转化为数字化的信号发送给处理器进行处理
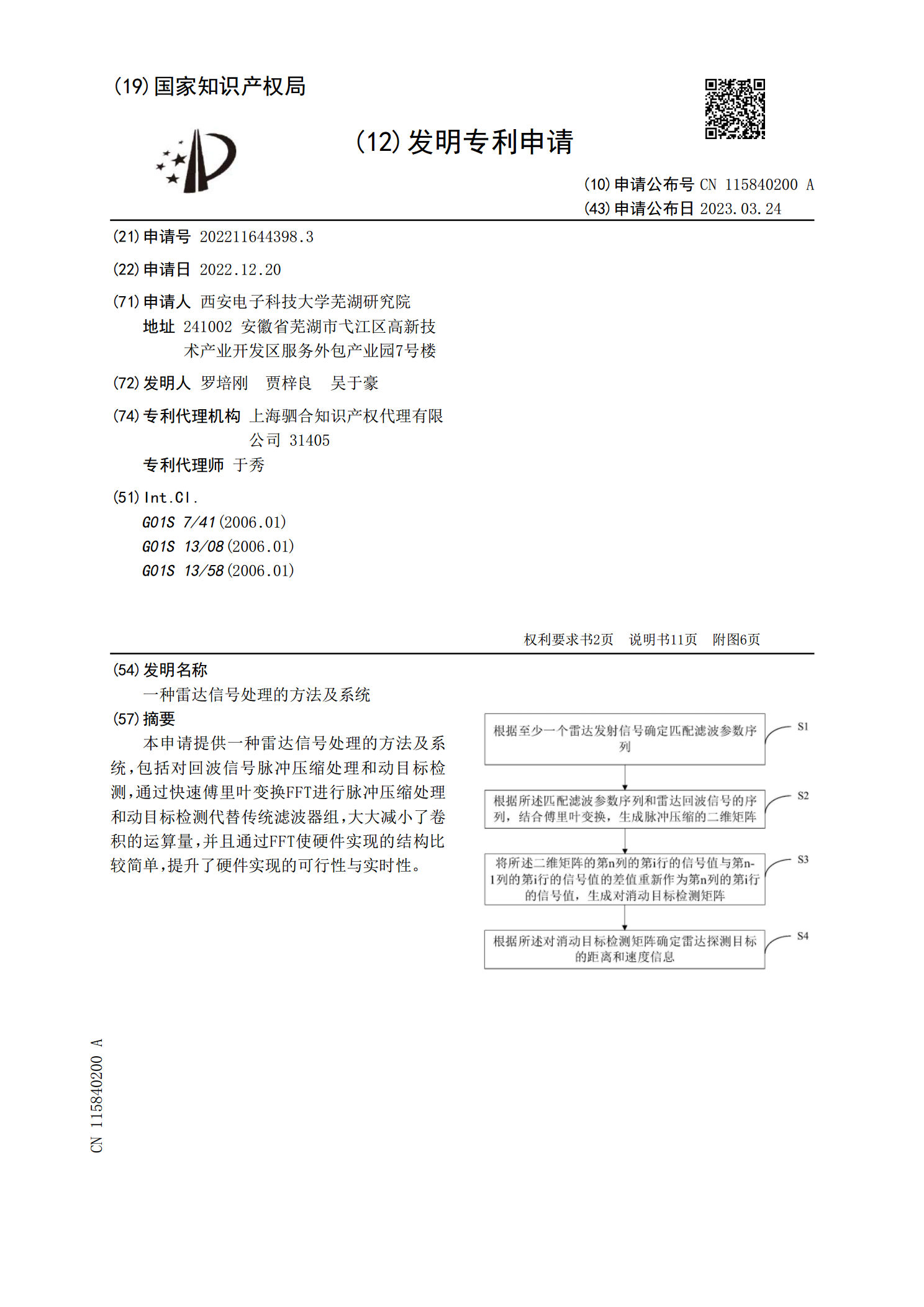
一种雷达信号处理的方法及系统.pdf
本申请提供一种雷达信号处理的方法及系统,包括对回波信号脉冲压缩处理和动目标检测,通过快速傅里叶变换FFT进行脉冲压缩处理和动目标检测代替传统滤波器组,大大减小了卷积的运算量,并且通过FFT使硬件实现的结构比较简单,提升了硬件实现的可行性与实时性。
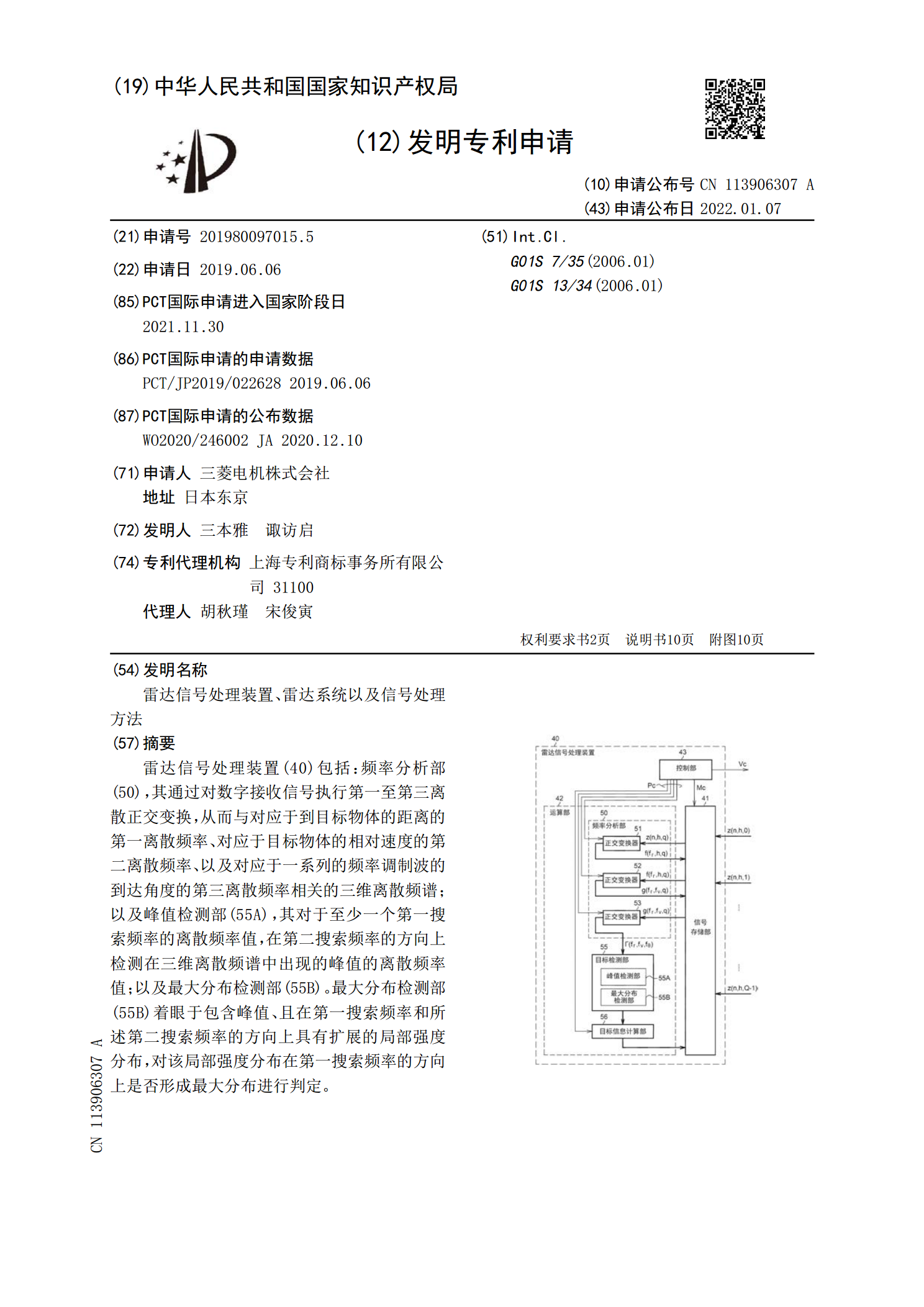
雷达信号处理装置、雷达系统以及信号处理方法.pdf
雷达信号处理装置(40)包括:频率分析部(50),其通过对数字接收信号执行第一至第三离散正交变换,从而与对应于到目标物体的距离的第一离散频率、对应于目标物体的相对速度的第二离散频率、以及对应于一系列的频率调制波的到达角度的第三离散频率相关的三维离散频谱;以及峰值检测部(55A),其对于至少一个第一搜索频率的离散频率值,在第二搜索频率的方向上检测在三维离散频谱中出现的峰值的离散频率值;以及最大分布检测部(55B)。最大分布检测部(55B)着眼于包含峰值、且在第一搜索频率和所述第二搜索频率的方向上具有扩展的局