
一种智能医用艾灸机器人.pdf

书生****写意


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能医用艾灸机器人.pdf
本发明公开了一种智能医用艾灸机器人,主要由医疗床、主机智能机械手臂、辅机智能机械手臂、主机艾灸作业执行机构、辅机艾灸作业执行机构以及机器人控制器构成,其中,主机智能机械手臂和辅机智能机械手臂均设置在医疗床的同侧,主机艾灸作业执行机构与主机智能机械手臂连接,用于艾灸条的夹持、旋转等操作控制,而辅机艾灸作业执行机构与辅机智能机械手臂连接,用于辅助主机艾灸作业执行机构进行艾灸条的点燃、切灰以及熄灭等操作,通过机器人控制器对以及主机艾灸作业执行机构和辅机艾灸作业执行机构的具体动作执行,以最大程度保持与传统手持灸工

一种智能家用艾灸机器人.pdf
本发明公开了一种智能家用艾灸机器人,主要由底座、智能机械手臂、艾灸作业执行机构、艾灸辅助盒子给进机构、艾灸辅助盒子、控制器以及排烟系统构成,其中,底座用于整体支撑,艾灸作业执行机构与智能机械手臂连接,用于艾灸条的夹持、旋转等操作,艾灸辅助盒子给进机构与智能机械手臂和艾灸辅助盒子连接,在艾灸辅助盒子给进机构的驱动下,艾灸辅助盒子可实现位置的调整与艾灸作业执行机构配合,完成艾灸以及削灰等操作,通过控制器对智能机械手臂、距离传感器以及视觉传感器的信号采集,控制智能机械手臂与艾灸辅助盒子配合,以保持与传统手持灸工

一种临床医用智能机器人.pdf
本发明公开了一种临床医用智能机器人,包括机身与处于机身顶端的头部,且所述头部呈现圆球状,所述头部顶端设有信号接收天线,且所述信号接收天线设在头部后侧左端位置,所述头部顶端设有信号发送天线,且所述信号发送天线处于信号接收天线的对称位置,所述头部前端顶部位置安装有扬声器,所述扬声器呈现眉毛状既起到美观作用也实用,所述头部底端连接有机械旋转脖,且所述机械旋转脖底端连接在机身内部,所述机身内部设有高容量电平,且所述高容量电平设在机身内部后端位置以便留出更多的功能区供其他结构使用,所述机身外部后端设有垃圾箱,所述垃

一种医用艾灸器.pdf
本发明涉及一种医用艾灸器,包括螺纹柱,螺纹柱一端固定连接把手杆,螺纹柱另一端固定连接夹持装置,夹持装置包括固定环,固定环固定连接在螺纹柱上,在固定环内固定连接固定座,在固定环的环壁上设有滑动孔,在滑动孔内滑动连接滑杆,滑杆伸入固定环内的一端固定连接圆弧形的夹持板,在滑杆外侧套接弹簧,弹簧位于夹持板与固定环之间,在螺纹柱外侧螺纹连接螺纹环,在螺纹环一侧固定连接四个支撑杆,四个支撑杆以螺纹环的轴线为中心均匀设置,在其中两个相对的支撑杆之间设有限位杆。本发明所提供的一种医用艾灸器能够保证艾条或艾棒的燃烧端距离人
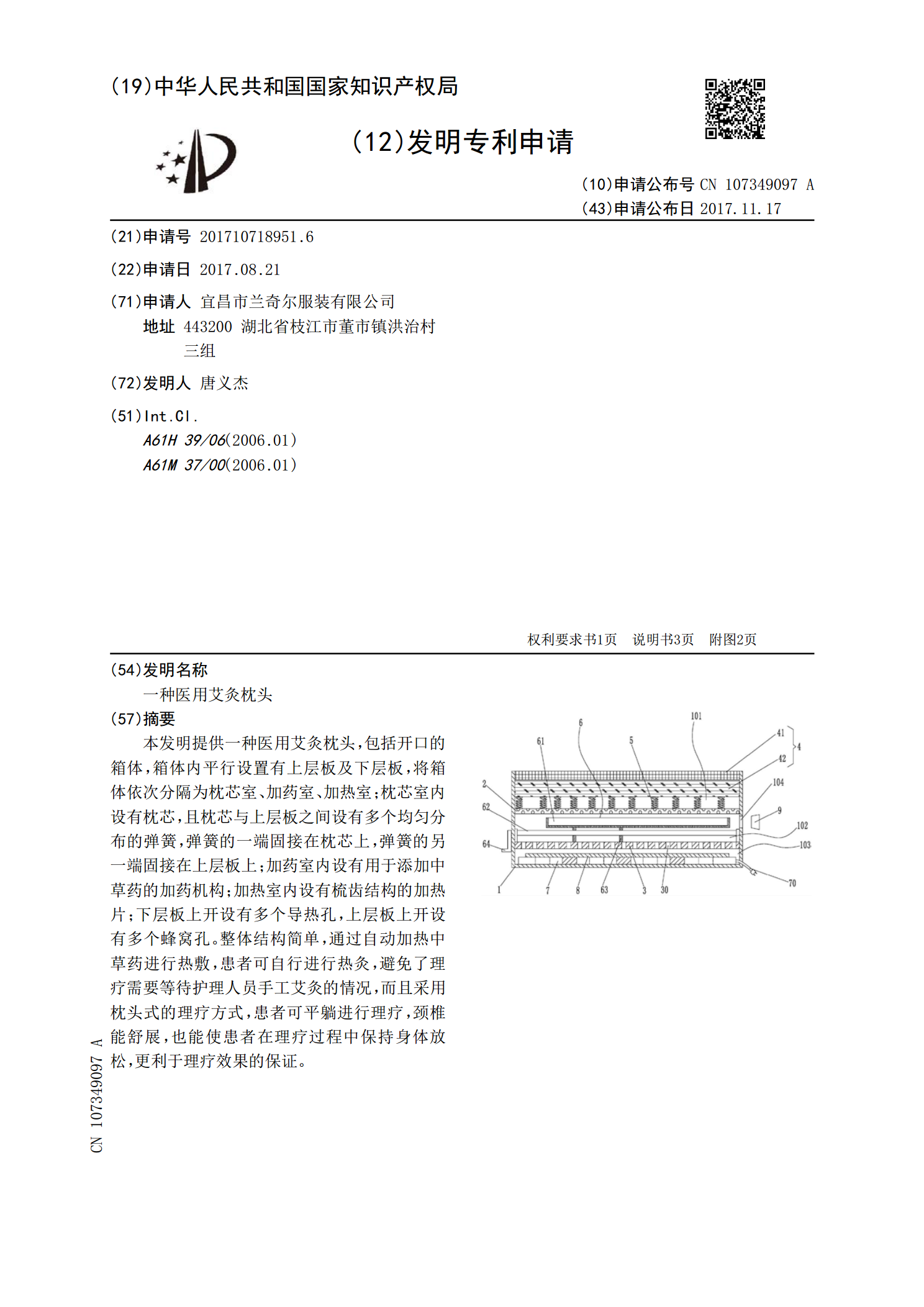
一种医用艾灸枕头.pdf
本发明提供一种医用艾灸枕头,包括开口的箱体,箱体内平行设置有上层板及下层板,将箱体依次分隔为枕芯室、加药室、加热室;枕芯室内设有枕芯,且枕芯与上层板之间设有多个均匀分布的弹簧,弹簧的一端固接在枕芯上,弹簧的另一端固接在上层板上;加药室内设有用于添加中草药的加药机构;加热室内设有梳齿结构的加热片;下层板上开设有多个导热孔,上层板上开设有多个蜂窝孔。整体结构简单,通过自动加热中草药进行热敷,患者可自行进行热灸,避免了理疗需要等待护理人员手工艾灸的情况,而且采用枕头式的理疗方式,患者可平躺进行理疗,颈椎能舒展,