
一种临床医用智能机器人.pdf

书生****ma

1/8
2/8

3/8
4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种临床医用智能机器人.pdf
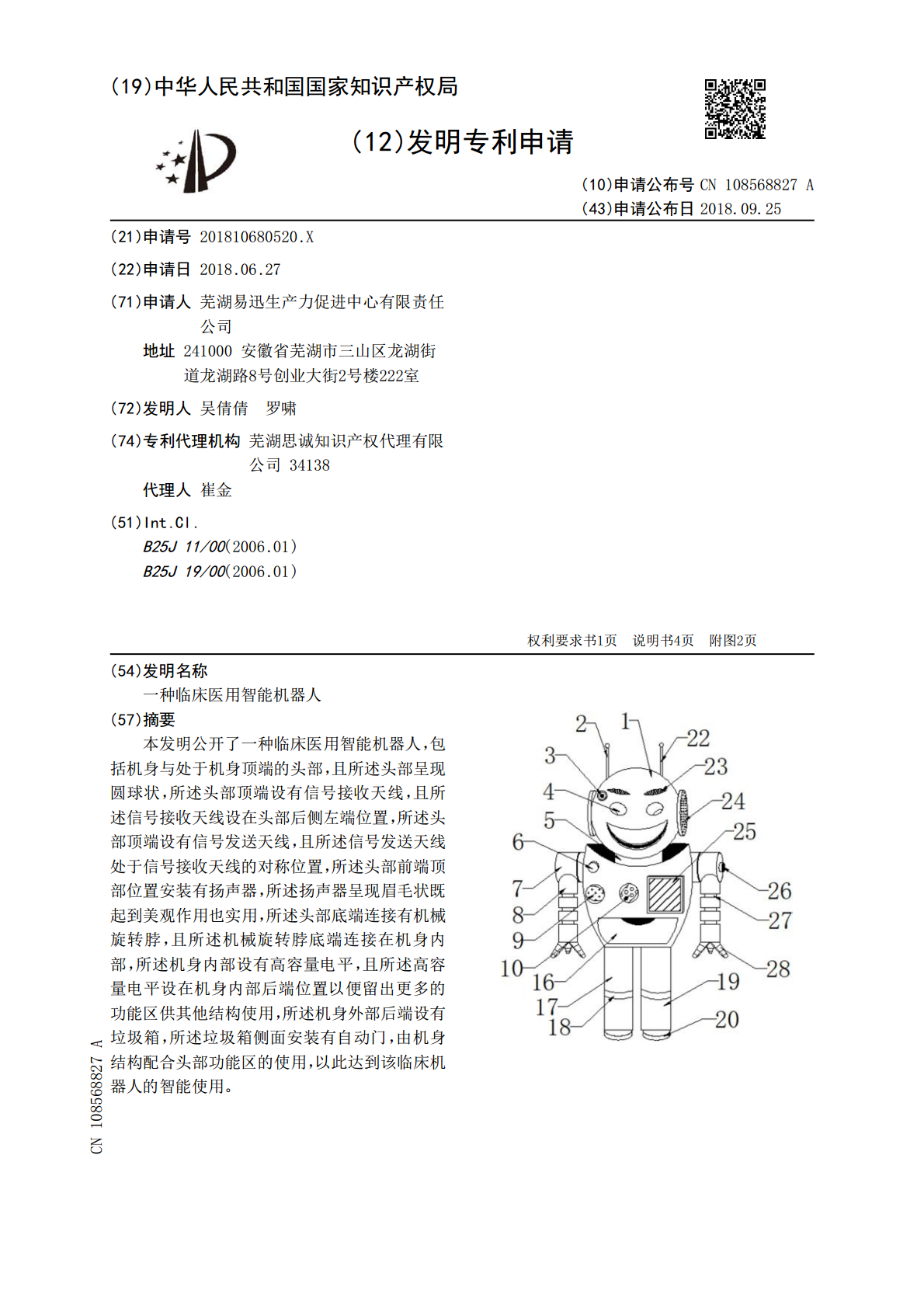
本发明公开了一种临床医用智能机器人,包括机身与处于机身顶端的头部,且所述头部呈现圆球状,所述头部顶端设有信号接收天线,且所述信号接收天线设在头部后侧左端位置,所述头部顶端设有信号发送天线,且所述信号发送天线处于信号接收天线的对称位置,所述头部前端顶部位置安装有扬声器,所述扬声器呈现眉毛状既起到美观作用也实用,所述头部底端连接有机械旋转脖,且所述机械旋转脖底端连接在机身内部,所述机身内部设有高容量电平,且所述高容量电平设在机身内部后端位置以便留出更多的功能区供其他结构使用,所述机身外部后端设有垃圾箱,所述垃

一种智能医用艾灸机器人.pdf
本发明公开了一种智能医用艾灸机器人,主要由医疗床、主机智能机械手臂、辅机智能机械手臂、主机艾灸作业执行机构、辅机艾灸作业执行机构以及机器人控制器构成,其中,主机智能机械手臂和辅机智能机械手臂均设置在医疗床的同侧,主机艾灸作业执行机构与主机智能机械手臂连接,用于艾灸条的夹持、旋转等操作控制,而辅机艾灸作业执行机构与辅机智能机械手臂连接,用于辅助主机艾灸作业执行机构进行艾灸条的点燃、切灰以及熄灭等操作,通过机器人控制器对以及主机艾灸作业执行机构和辅机艾灸作业执行机构的具体动作执行,以最大程度保持与传统手持灸工
一种医用试管刷洗智能机器人.pdf
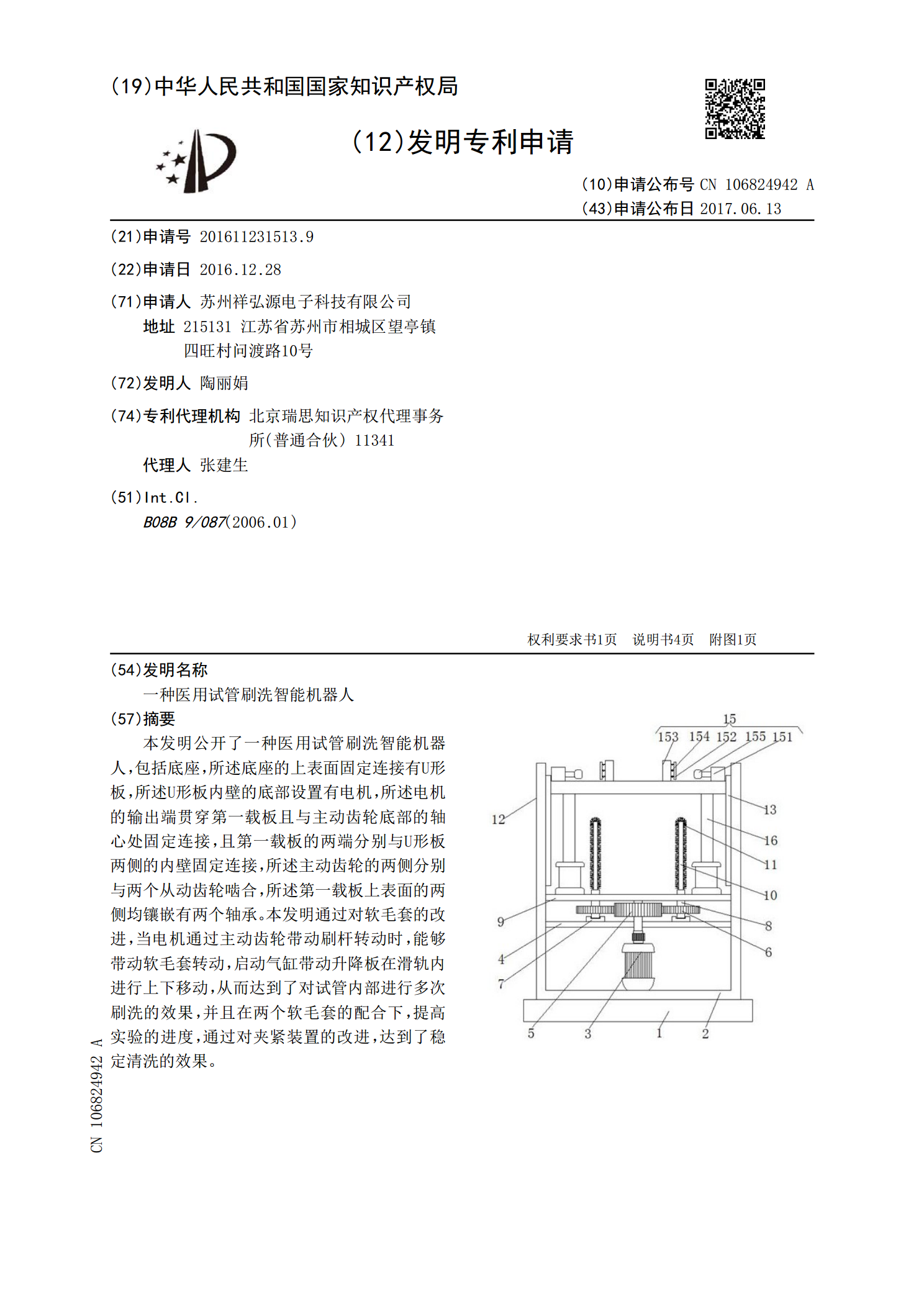
本发明公开了一种医用试管刷洗智能机器人,包括底座,所述底座的上表面固定连接有U形板,所述U形板内壁的底部设置有电机,所述电机的输出端贯穿第一载板且与主动齿轮底部的轴心处固定连接,且第一载板的两端分别与U形板两侧的内壁固定连接,所述主动齿轮的两侧分别与两个从动齿轮啮合,所述第一载板上表面的两侧均镶嵌有两个轴承。本发明通过对软毛套的改进,当电机通过主动齿轮带动刷杆转动时,能够带动软毛套转动,启动气缸带动升降板在滑轨内进行上下移动,从而达到了对试管内部进行多次刷洗的效果,并且在两个软毛套的配合下,提高实验的进度

一种具有医用家用复合功能的智能机器人.pdf
一种具有医用家用复合功能的智能机器人,包括:人体仿真模型,支撑底座,交互式人体体征提示装置以及控制系统,控制系统包括信息采集模块、信息存储模块、信息处理模块和执行终端,通过所述控制系统能够实现医疗保健人机交互功能和家用辅助功能,医疗保健人机交互功能包括体征识别、医疗问诊、保健问诊中的一种或多种,具体可包括语音识别以及穴位和/或经络的灯光指示、语音输出、可视化信息输出功能,智能问诊功能和主动诊断功能,家用辅助功能包括智能家教、互动娱乐及家电智能控制中的一种或多种。该智能机器人在体征识别和人机交互方面获得了大

一种医用智能担架.pdf
一种医用智能担架,包括担架主体、动力模块、担架轮、导轨、导轨转台、转台电机、定位系统、控制系统,所述动力模块与控制系统连接,用于驱动担架轮转动,所述担架轮安装在所述担架主体的底部,所述导轨和导轨转台通过对担架轮的约束,可引导担架主体的运动路径,所述转台电机用于驱动导轨转台转动,且与控制系统连接,所述定位系统与所述控制系统连接。本发明涉及医疗器材领域,当出现临床突发情况需要用担架转移患者时,本发明医用智能担架能够沿导轨快速自动到达患者的病房门口,等患者被搬上担架,医护人员也站上去之后,再沿导轨快速行驶至手术