
一种柔性扫描机械臂系统及柔性扫描方法.pdf

大渊****公主


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种柔性扫描机械臂系统及柔性扫描方法.pdf
本申请提供了一种柔性扫描机械臂系统及柔性扫描方法。该系统包括:机械臂、转台、主机和扫描探头,主机分别与机械臂、转台、扫描探头通讯连接,扫描探头安装于机械臂上,转台用于安装待扫描工件,能够带动待扫描工件一起移动至预定位置,并根据主机的姿态调整指令,对待扫描工件的姿态进行调整;机械臂能够根据主机发送的轨迹数据运动,对扫描探头的姿态进行调整;响应于机械臂运动至预设检测点位,扫描探头根据接收到的主机发送的扫描信号,对待扫描工件进行扫描;响应于扫描设备在机械臂的预设停留时间内接收到待扫描工件的反馈信号,机械臂根据轨
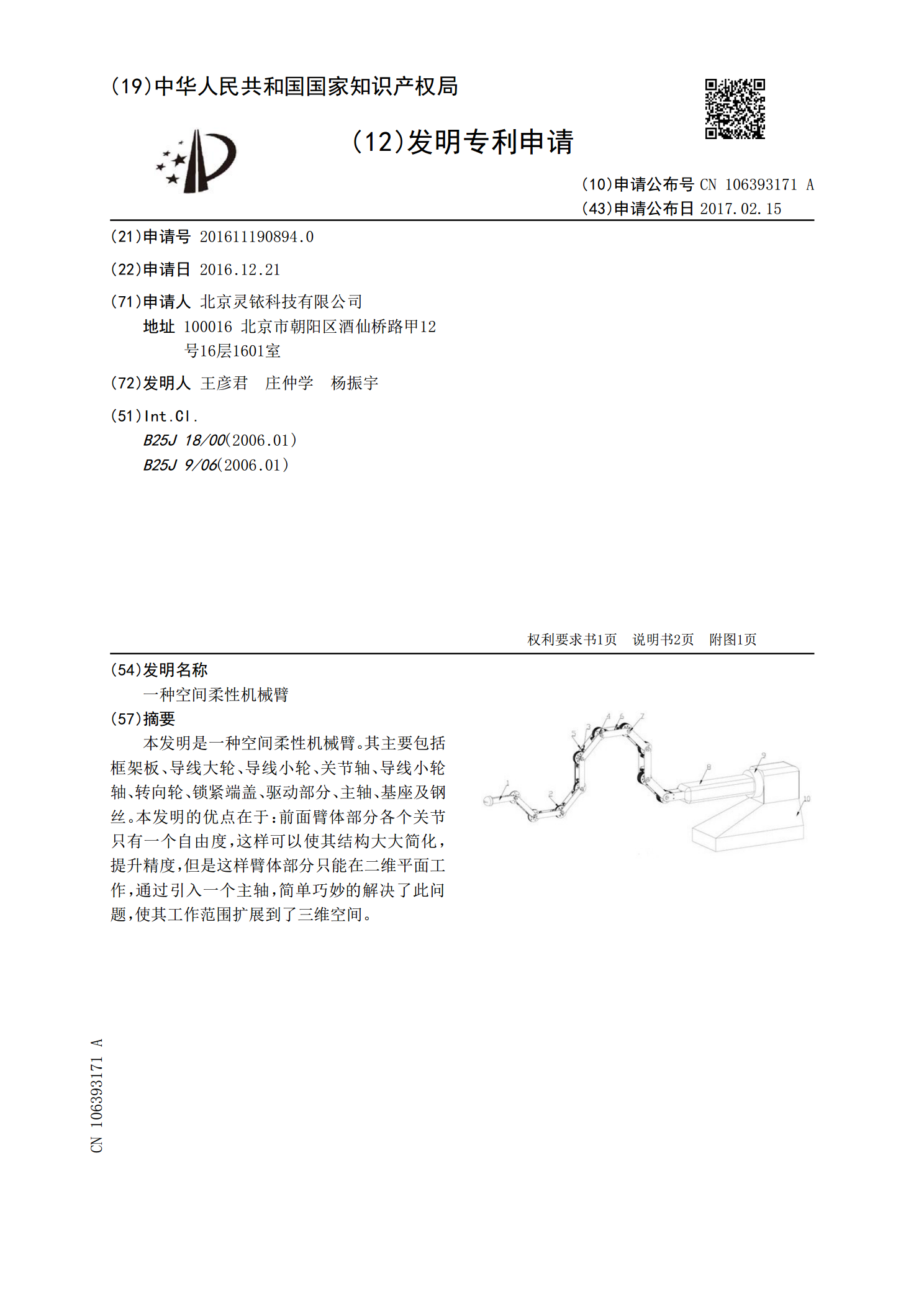
一种空间柔性机械臂.pdf
本发明是一种空间柔性机械臂。其主要包括框架板、导线大轮、导线小轮、关节轴、导线小轮轴、转向轮、锁紧端盖、驱动部分、主轴、基座及钢丝。本发明的优点在于:前面臂体部分各个关节只有一个自由度,这样可以使其结构大大简化,提升精度,但是这样臂体部分只能在二维平面工作,通过引入一个主轴,简单巧妙的解决了此问题,使其工作范围扩展到了三维空间。
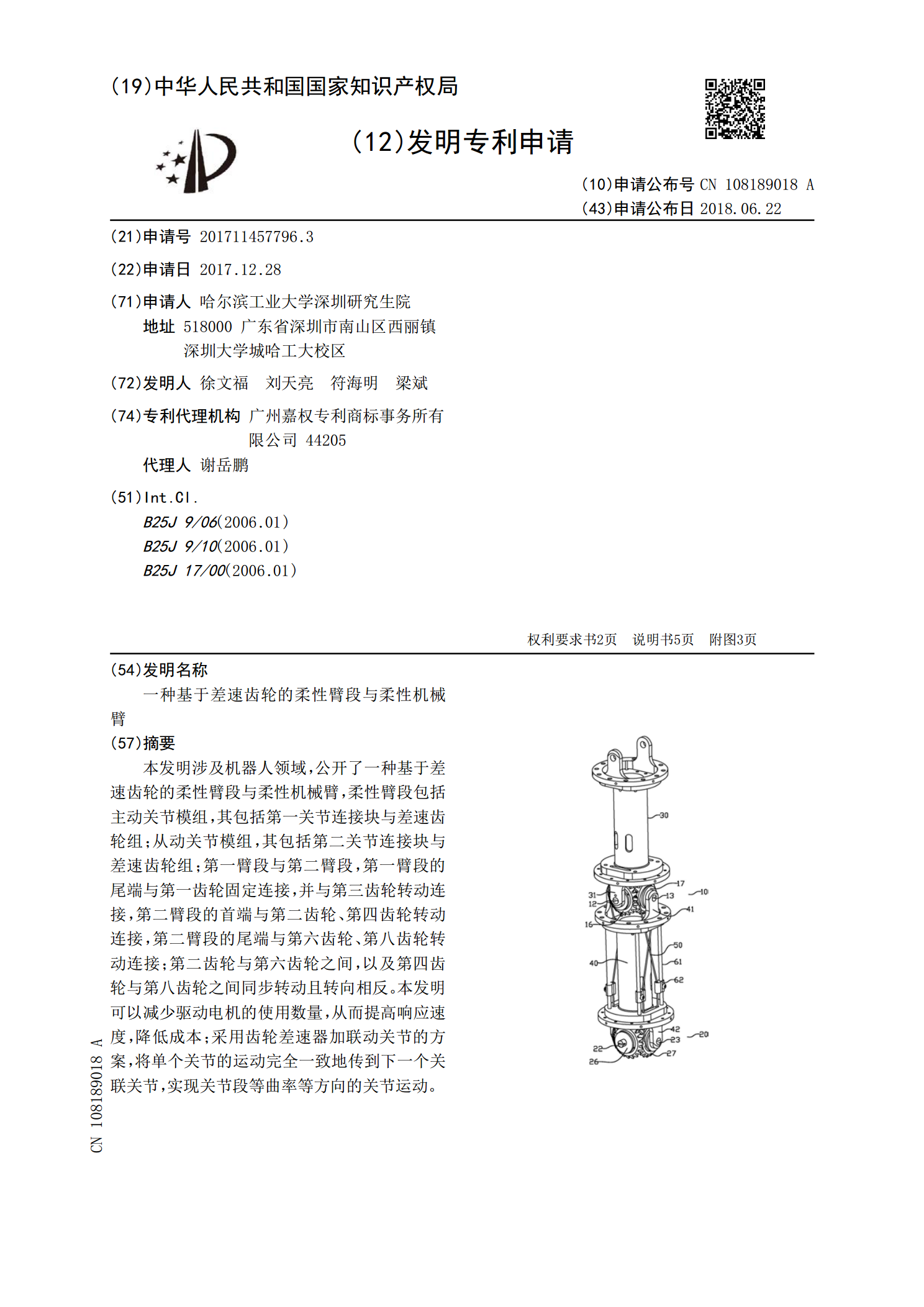
一种基于差速齿轮的柔性臂段与柔性机械臂.pdf
本发明涉及机器人领域,公开了一种基于差速齿轮的柔性臂段与柔性机械臂,柔性臂段包括主动关节模组,其包括第一关节连接块与差速齿轮组;从动关节模组,其包括第二关节连接块与差速齿轮组;第一臂段与第二臂段,第一臂段的尾端与第一齿轮固定连接,并与第三齿轮转动连接,第二臂段的首端与第二齿轮、第四齿轮转动连接,第二臂段的尾端与第六齿轮、第八齿轮转动连接;第二齿轮与第六齿轮之间,以及第四齿轮与第八齿轮之间同步转动且转向相反。本发明可以减少驱动电机的使用数量,从而提高响应速度,降低成本;采用齿轮差速器加联动关节的方案,将单个
一种多自由度机械臂柔性控制方法和系统.pdf
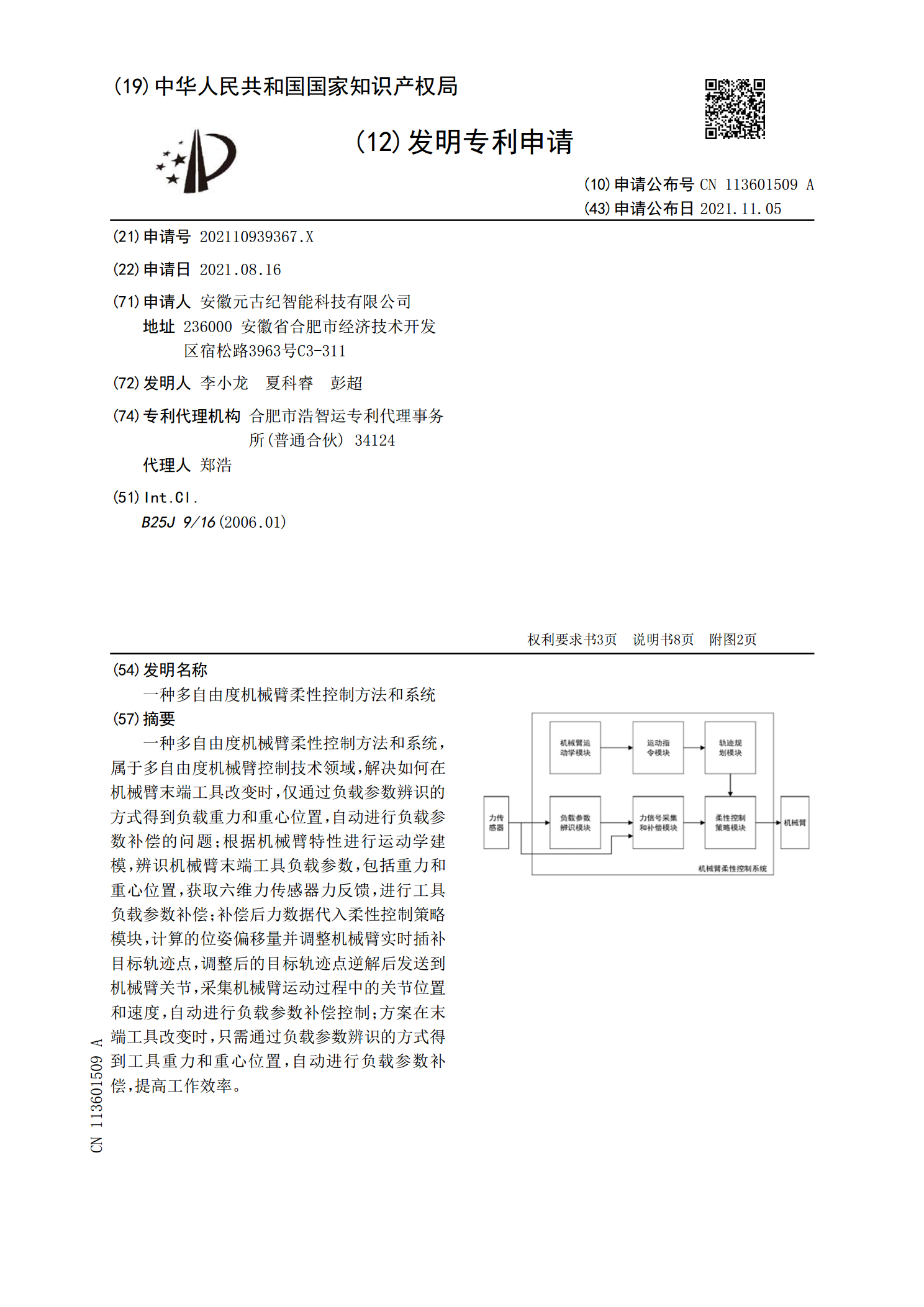
一种多自由度机械臂柔性控制方法和系统,属于多自由度机械臂控制技术领域,解决如何在机械臂末端工具改变时,仅通过负载参数辨识的方式得到负载重力和重心位置,自动进行负载参数补偿的问题;根据机械臂特性进行运动学建模,辨识机械臂末端工具负载参数,包括重力和重心位置,获取六维力传感器力反馈,进行工具负载参数补偿;补偿后力数据代入柔性控制策略模块,计算的位姿偏移量并调整机械臂实时插补目标轨迹点,调整后的目标轨迹点逆解后发送到机械臂关节,采集机械臂运动过程中的关节位置和速度,自动进行负载参数补偿控制;方案在末端工具改变时

一种磁驱动柔性机械臂.pdf
一种灵活性好、占用空间小的磁驱动柔性机械臂,主舱体的上部左侧开有第一齿条孔,主舱体的上部右侧开有第二齿条孔,主舱体内安装有电机,电机的输出轴上连接有主动公齿轮,主动公齿轮上连接有第一电磁组,第一电磁组包括主动母齿轮,主动母齿轮上侧啮合有齿条一,齿条一的左端固定连接有电磁铁一,所述第二电池组包括从动母齿轮,从动母齿轮上啮合有齿条二,齿条二的右端固定连接有电磁铁二,主动母齿轮与从动母齿轮相啮合,主舱体外表面安装有开关,开关与所述的电磁铁一和电磁铁二电连接,所述柔性臂上设计有永磁体,位于柔性臂的同一侧面上的永磁