
一种磁驱动柔性机械臂.pdf

雨巷****可歆


1/6
2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种磁驱动柔性机械臂.pdf
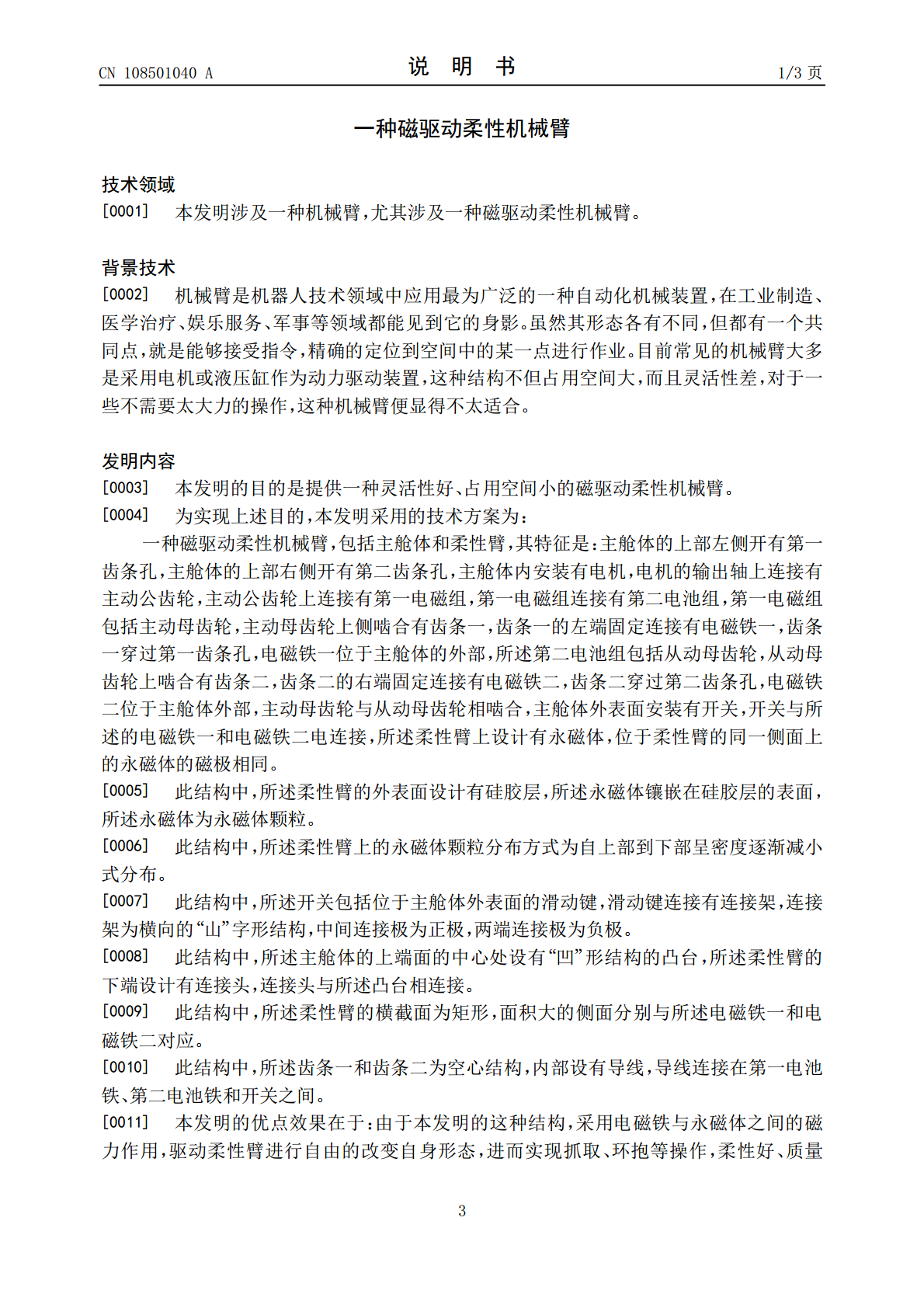
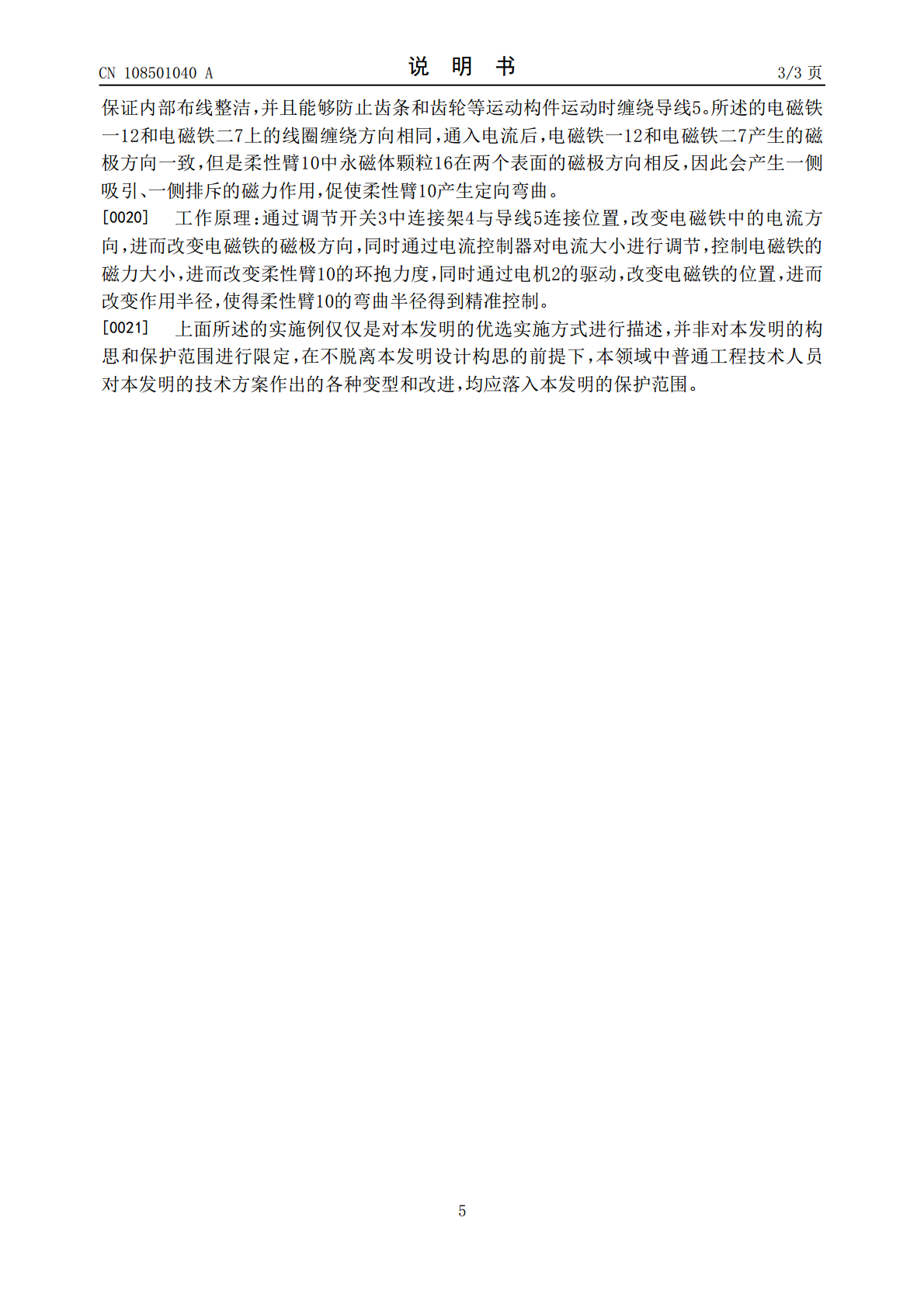
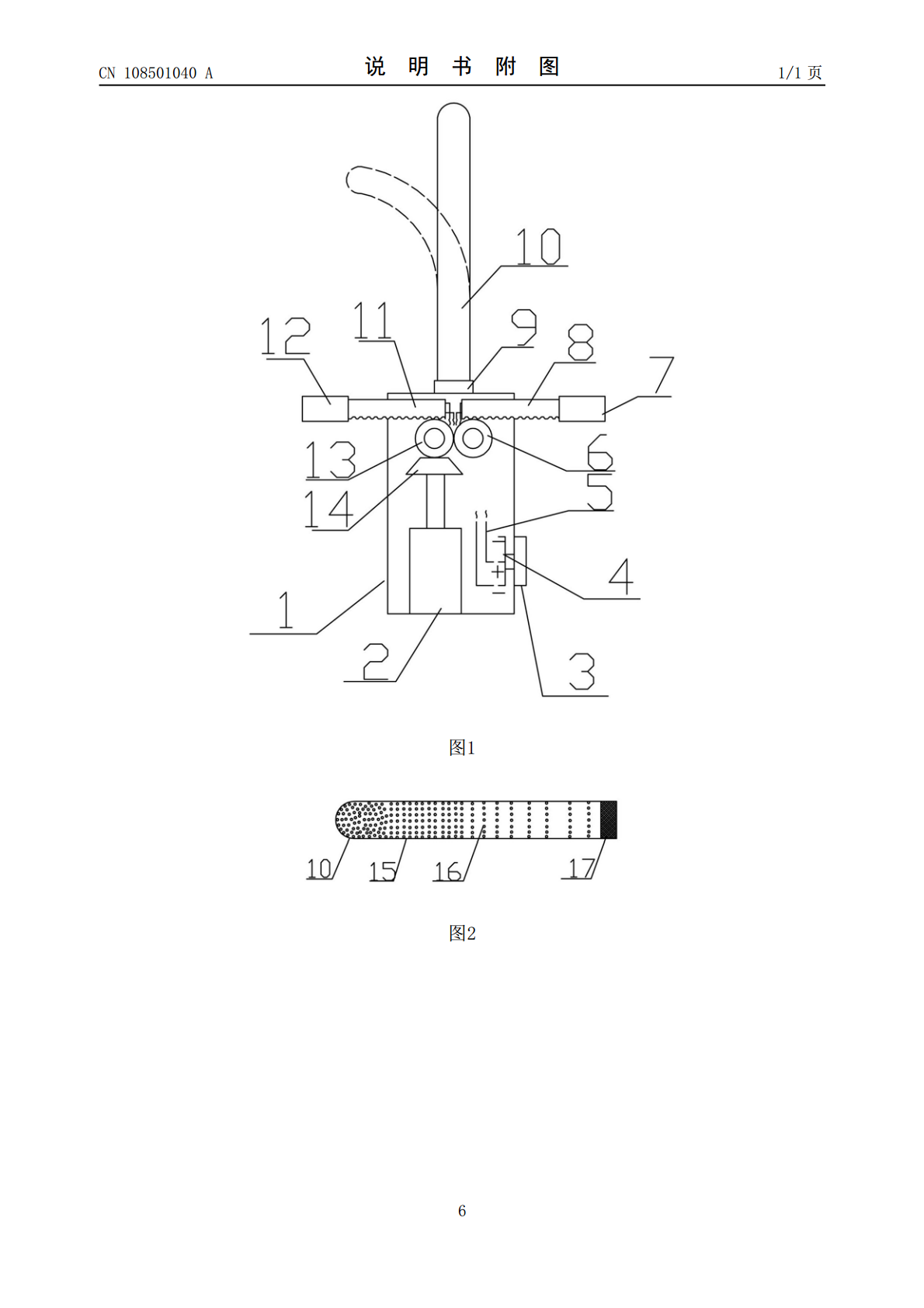
一种灵活性好、占用空间小的磁驱动柔性机械臂,主舱体的上部左侧开有第一齿条孔,主舱体的上部右侧开有第二齿条孔,主舱体内安装有电机,电机的输出轴上连接有主动公齿轮,主动公齿轮上连接有第一电磁组,第一电磁组包括主动母齿轮,主动母齿轮上侧啮合有齿条一,齿条一的左端固定连接有电磁铁一,所述第二电池组包括从动母齿轮,从动母齿轮上啮合有齿条二,齿条二的右端固定连接有电磁铁二,主动母齿轮与从动母齿轮相啮合,主舱体外表面安装有开关,开关与所述的电磁铁一和电磁铁二电连接,所述柔性臂上设计有永磁体,位于柔性臂的同一侧面上的永磁
一种用于绳索驱动型柔性机械臂的驱动装置.pdf
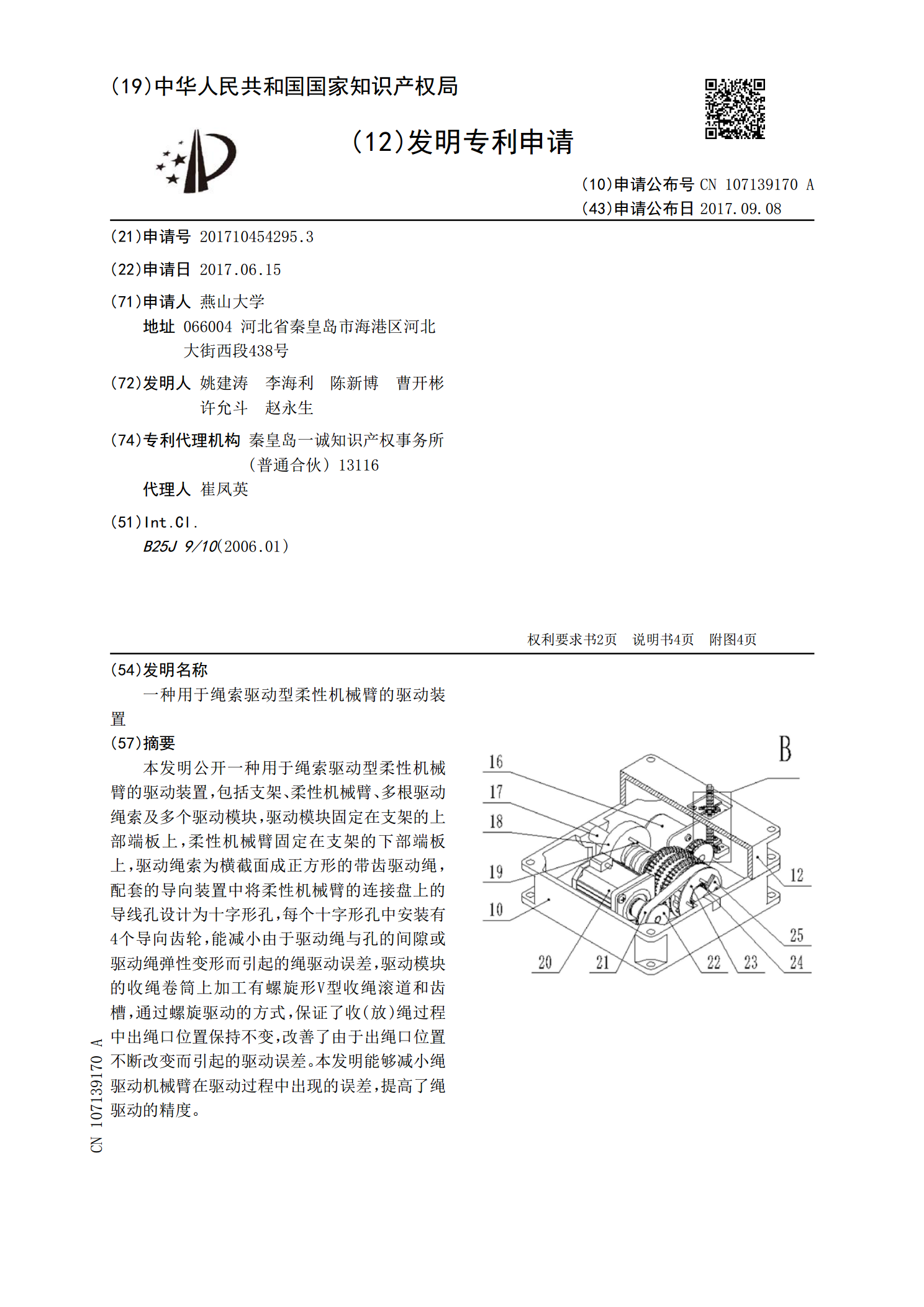
本发明公开一种用于绳索驱动型柔性机械臂的驱动装置,包括支架、柔性机械臂、多根驱动绳索及多个驱动模块,驱动模块固定在支架的上部端板上,柔性机械臂固定在支架的下部端板上,驱动绳索为横截面成正方形的带齿驱动绳,配套的导向装置中将柔性机械臂的连接盘上的导线孔设计为十字形孔,每个十字形孔中安装有4个导向齿轮,能减小由于驱动绳与孔的间隙或驱动绳弹性变形而引起的绳驱动误差,驱动模块的收绳卷筒上加工有螺旋形V型收绳滚道和齿槽,通过螺旋驱动的方式,保证了收(放)绳过程中出绳口位置保持不变,改善了由于出绳口位置不断改变而引起
一种可生长可刚柔变换的腱驱动柔性机械臂及其驱动方法.pdf
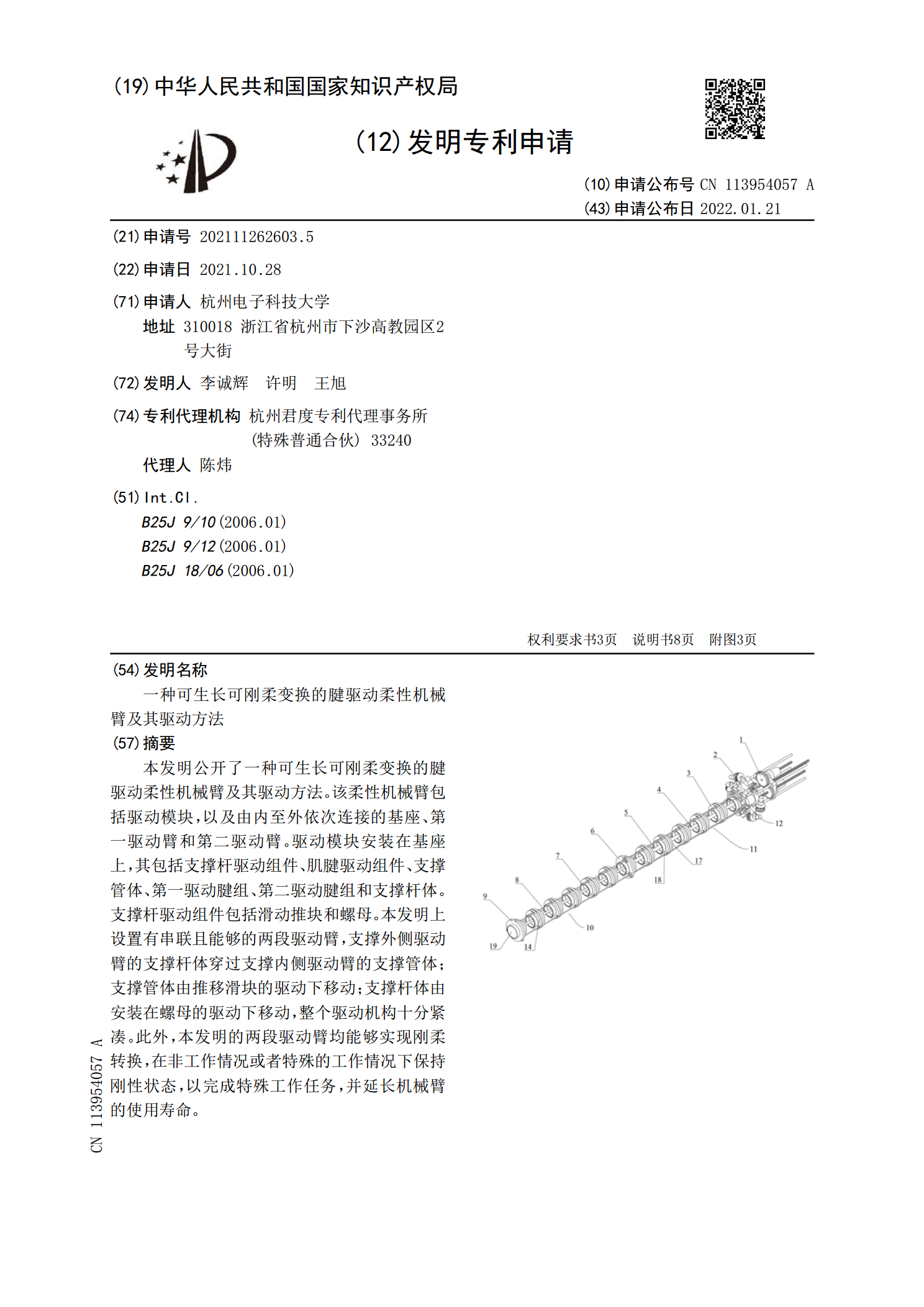
本发明公开了一种可生长可刚柔变换的腱驱动柔性机械臂及其驱动方法。该柔性机械臂包括驱动模块,以及由内至外依次连接的基座、第一驱动臂和第二驱动臂。驱动模块安装在基座上,其包括支撑杆驱动组件、肌腱驱动组件、支撑管体、第一驱动腱组、第二驱动腱组和支撑杆体。支撑杆驱动组件包括滑动推块和螺母。本发明上设置有串联且能够的两段驱动臂,支撑外侧驱动臂的支撑杆体穿过支撑内侧驱动臂的支撑管体;支撑管体由推移滑块的驱动下移动;支撑杆体由安装在螺母的驱动下移动,整个驱动机构十分紧凑。此外,本发明的两段驱动臂均能够实现刚柔转换,在非

基于绳索驱动的轮辐式柔性机械臂.pdf
一种基于绳索驱动的轮辐式柔性机械臂,它包括机座、臂身机构、末端执行器和驱动绳索;所述的臂身机构由若干关节单元串联而成,臂身机构的一端通过连接盘固定在机座上,另一端也就是臂身机构的末端与末端执行器连接;所述驱动绳索为周向均布的三根,每根绳索的一端固定在臂身机构末端,另一端依次穿过每一个关节单元的过线孔连接在机座中电机的滚轮上;所述的关节单元包括外框连接架、内框连接架、滑套、拉条以及相应的紧固螺母,外框连接架和内框连接架利用拉条连接,组成轮辐式的关节单元。本发明具有臂身质量轻,负载大,机动性好的优点,既保证了

线驱动柔性机械臂的运动学分析.docx
线驱动柔性机械臂的运动学分析线驱动柔性机械臂(Cable-drivenflexiblemanipulator)是一种新型的机械臂系统,其工作原理是通过安装在机械臂的关节处的多个拉力传感器或伺服电机来控制机械臂的运动。与传统的刚性机械臂相比,线驱动柔性机械臂具有更高的精度、更大的工作范围和更灵活的运动性能。线驱动柔性机械臂的运动学分析是对其运动学特性进行分析和研究的过程。运动学主要研究机械臂在空间中的位置、方向和位姿等参数的计算方法。运动学分析的结果可以为机械臂的运动规划、轨迹规划和控制提供重要的依据。一、