
一种空间柔性机械臂.pdf

阳炎****找我


1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种空间柔性机械臂.pdf
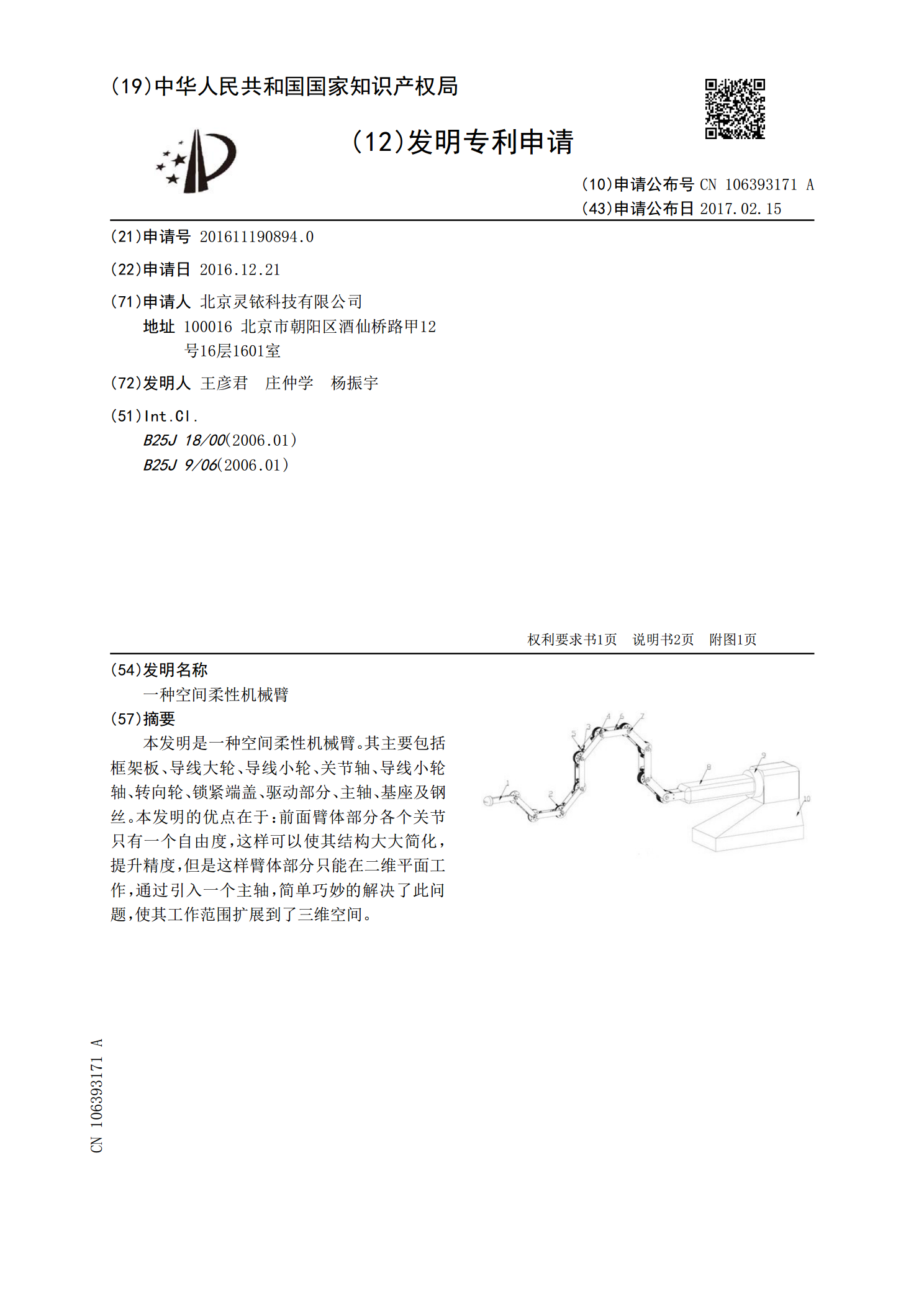
本发明是一种空间柔性机械臂。其主要包括框架板、导线大轮、导线小轮、关节轴、导线小轮轴、转向轮、锁紧端盖、驱动部分、主轴、基座及钢丝。本发明的优点在于:前面臂体部分各个关节只有一个自由度,这样可以使其结构大大简化,提升精度,但是这样臂体部分只能在二维平面工作,通过引入一个主轴,简单巧妙的解决了此问题,使其工作范围扩展到了三维空间。
一种基于差速齿轮的柔性臂段与柔性机械臂.pdf
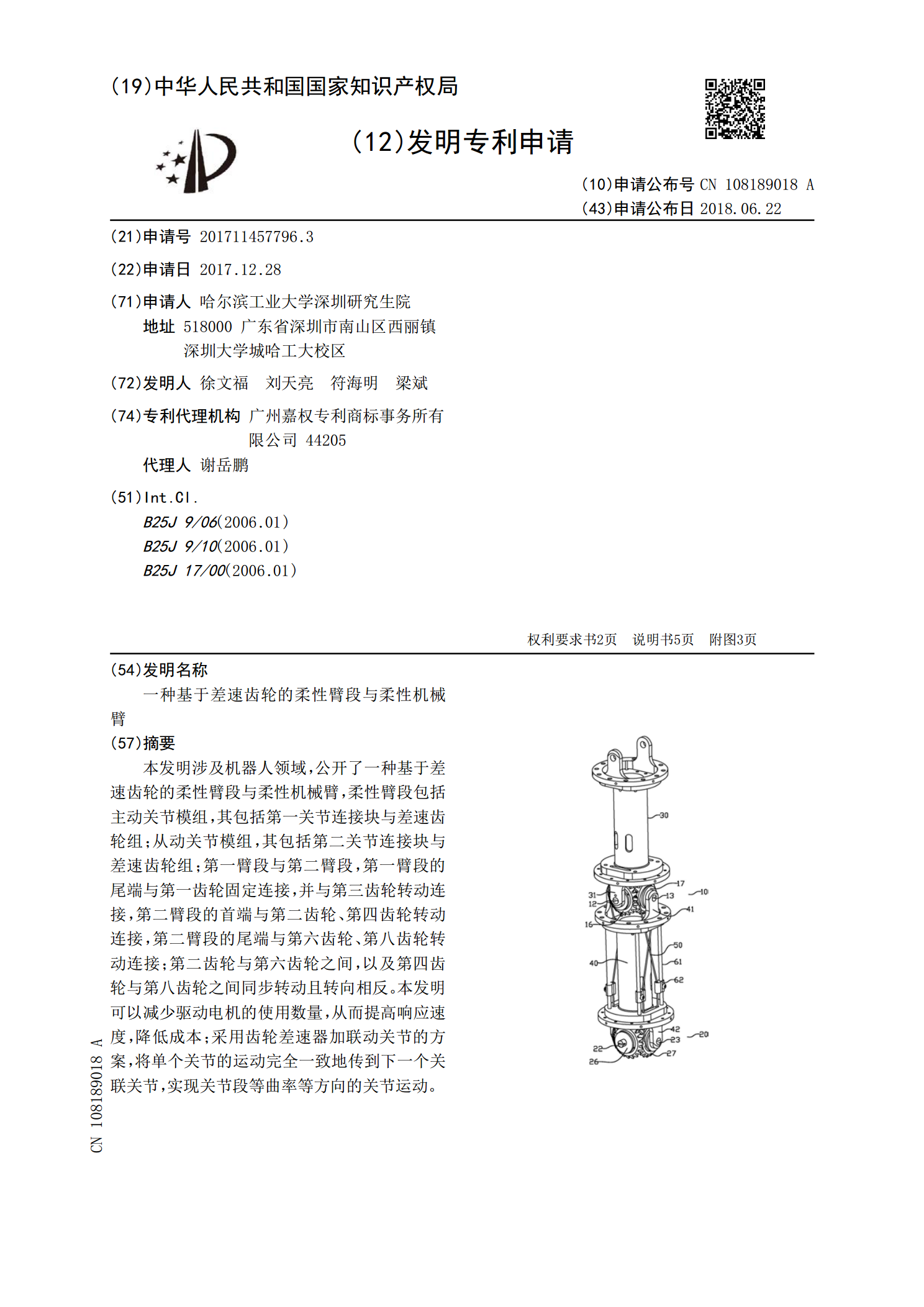
本发明涉及机器人领域,公开了一种基于差速齿轮的柔性臂段与柔性机械臂,柔性臂段包括主动关节模组,其包括第一关节连接块与差速齿轮组;从动关节模组,其包括第二关节连接块与差速齿轮组;第一臂段与第二臂段,第一臂段的尾端与第一齿轮固定连接,并与第三齿轮转动连接,第二臂段的首端与第二齿轮、第四齿轮转动连接,第二臂段的尾端与第六齿轮、第八齿轮转动连接;第二齿轮与第六齿轮之间,以及第四齿轮与第八齿轮之间同步转动且转向相反。本发明可以减少驱动电机的使用数量,从而提高响应速度,降低成本;采用齿轮差速器加联动关节的方案,将单个

一种磁驱动柔性机械臂.pdf
一种灵活性好、占用空间小的磁驱动柔性机械臂,主舱体的上部左侧开有第一齿条孔,主舱体的上部右侧开有第二齿条孔,主舱体内安装有电机,电机的输出轴上连接有主动公齿轮,主动公齿轮上连接有第一电磁组,第一电磁组包括主动母齿轮,主动母齿轮上侧啮合有齿条一,齿条一的左端固定连接有电磁铁一,所述第二电池组包括从动母齿轮,从动母齿轮上啮合有齿条二,齿条二的右端固定连接有电磁铁二,主动母齿轮与从动母齿轮相啮合,主舱体外表面安装有开关,开关与所述的电磁铁一和电磁铁二电连接,所述柔性臂上设计有永磁体,位于柔性臂的同一侧面上的永磁

空间大负载柔性机械臂轨迹跟踪策略研究.docx
空间大负载柔性机械臂轨迹跟踪策略研究摘要:本文探讨了空间大负载柔性机械臂轨迹跟踪策略的研究。首先介绍了柔性机械臂的特点和优势,分析了其在大负载应用场景中的问题。接着介绍了常见的轨迹跟踪控制方法,包括PID控制、模型预测控制和自适应控制等。结合柔性机械臂的特点,提出了一种基于自适应控制的轨迹跟踪策略。最后通过仿真实验验证了该策略的有效性。关键词:空间大负载、柔性机械臂、轨迹跟踪、自适应控制一、引言柔性机械臂作为一种新型的机械臂,在工业自动化领域有着广泛的应用前景。它相比于传统的机械臂,具有轻量化、高灵活性、

空间柔性机械臂控制策略研究的任务书.docx
空间柔性机械臂控制策略研究的任务书任务书一、任务背景随着科学技术的不断进步,机器人技术已经成为现代工业制造的重要组成部分,机械臂作为机器人的重要组成部分,其控制策略的研究对于机器人技术的进一步发展有着重要的作用。传统机械臂由于其刚性较高,所以在狭小空间中的表现较差,无法适应空间狭小的场合。而空间柔性机械臂由于具有高度柔性和可变形性,因此在空间狭小场合中表现得更加出色,越来越受到研究者的关注。当前,柔性机械臂控制策略的研究已经成为机械臂研究和控制领域的热点。然而,针对空间柔性机械臂控制策略的研究还相对较少,