
定位载具.pdf

Ch****91

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位载具.pdf
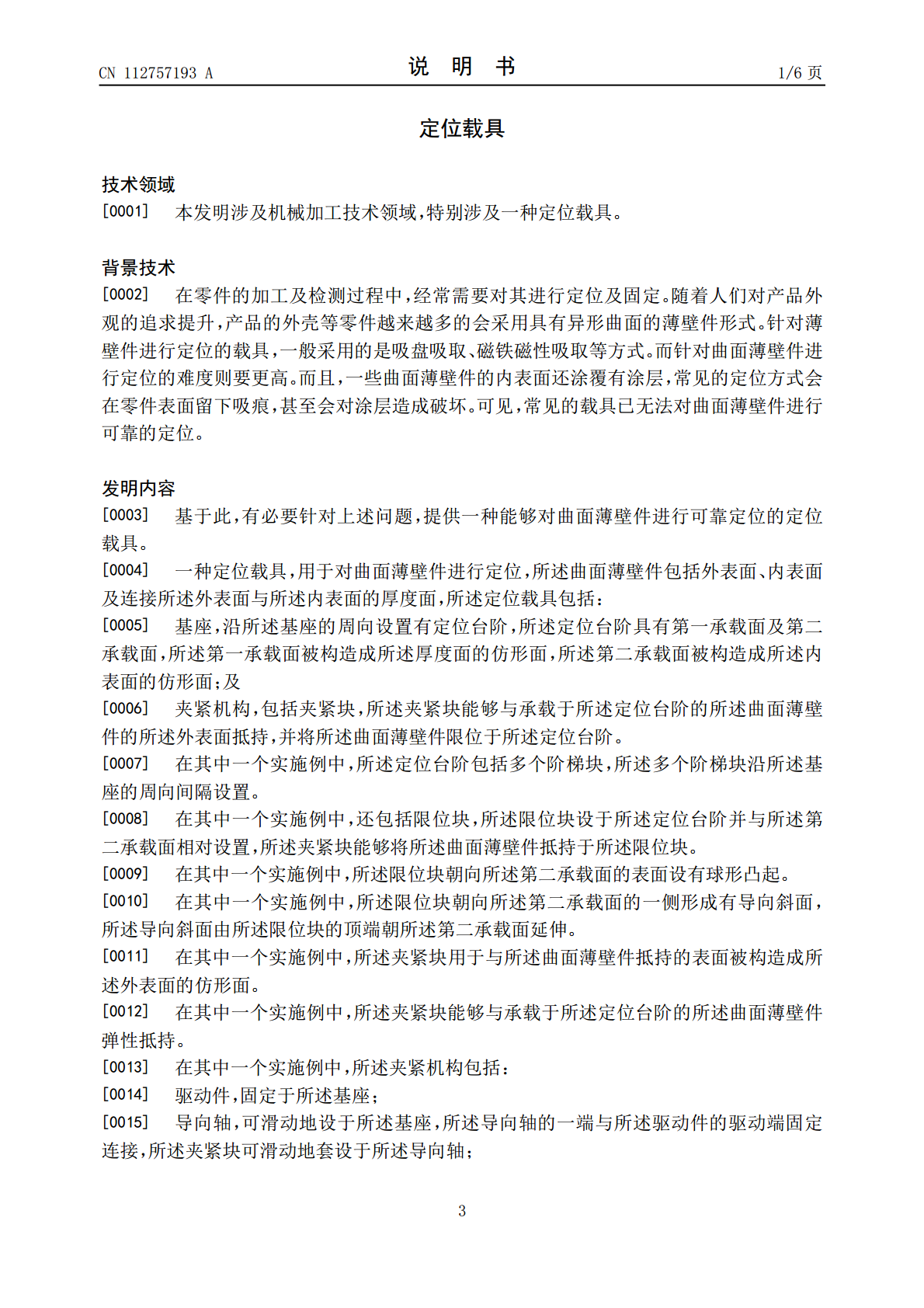
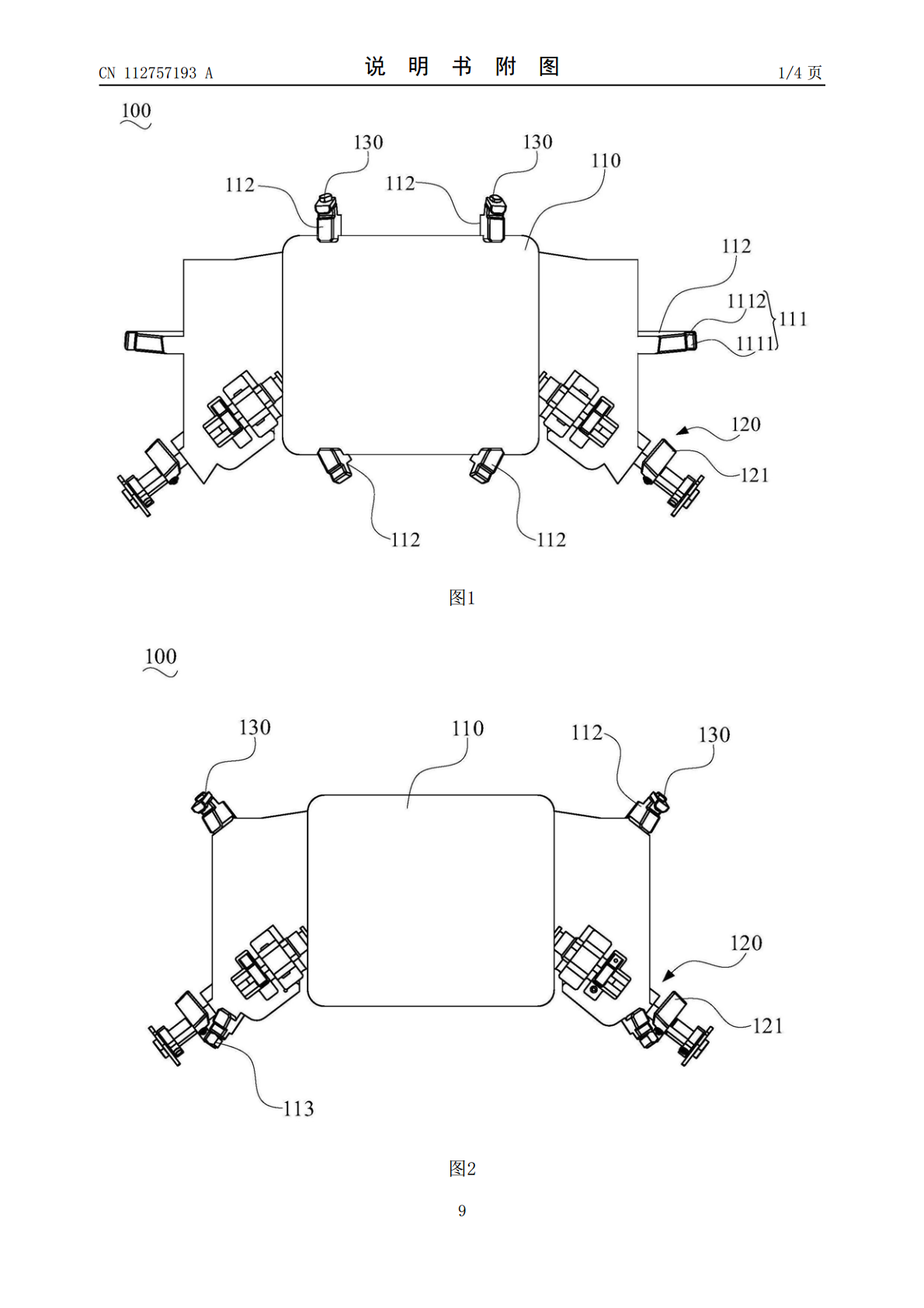
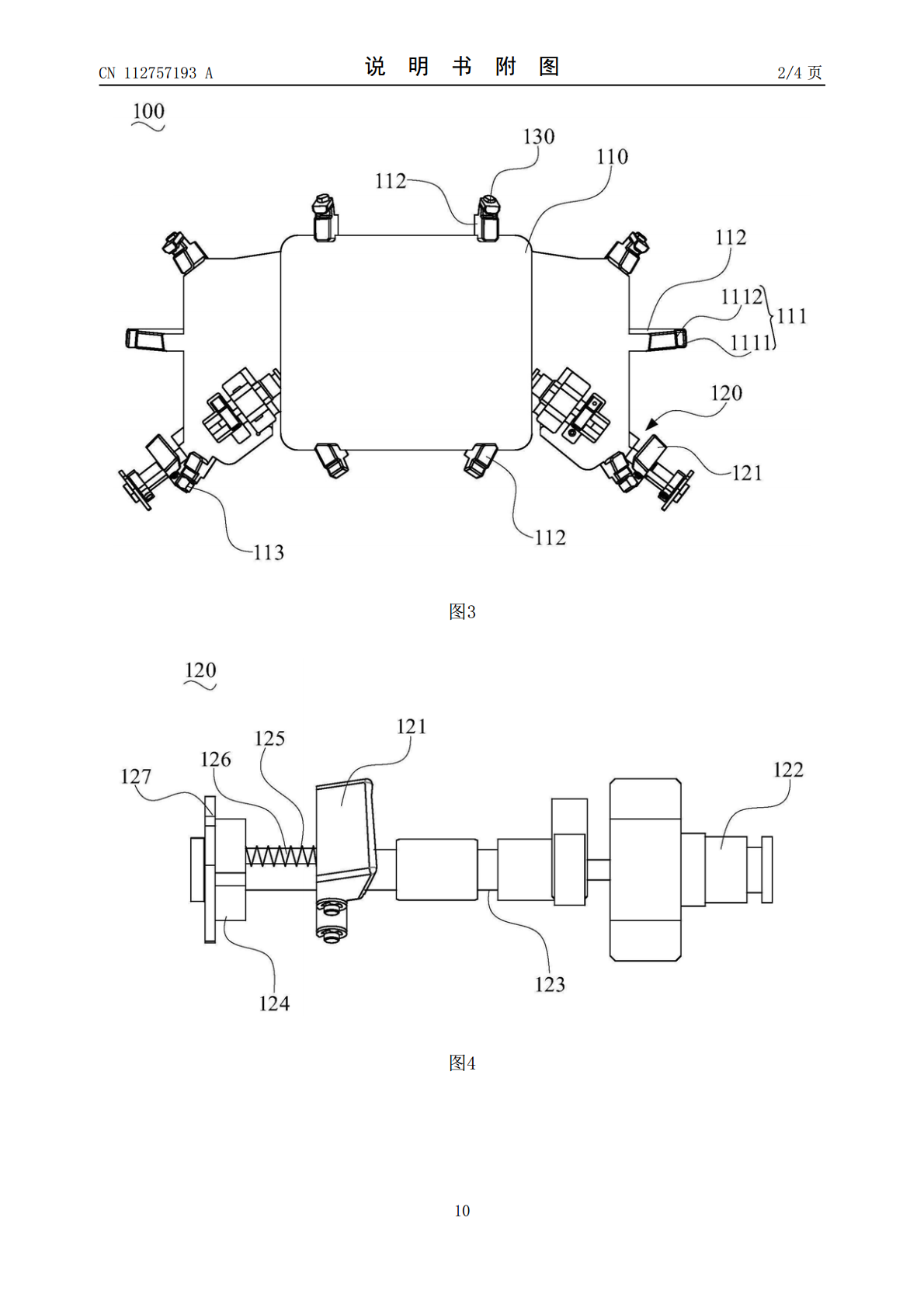
本发明涉及一种定位载具,包括基座及夹紧机构。沿基座的周向设置有定位台阶,定位台阶具有第一承载面及第二承载面。利用定位台阶能够承载曲面薄壁件。而且,由于定位台阶的第一承载面被构造成曲面薄壁件的厚度面的仿形面,第二承载面被构造成曲面薄壁件的内表面的仿形面,故通过将厚度面承靠于第一承载面及内表面承靠于第二承载,便可对曲面薄壁件在基座上进行定位。接着,操作夹紧机构并使夹紧块与承载于定位台阶的曲面薄壁件的外表面抵持,便可对曲面薄壁件实现夹紧。可见,上定位载具在定位曲面薄壁件时,既不会留下吸痕也不会对内表面造成破坏。
定位载具.pdf
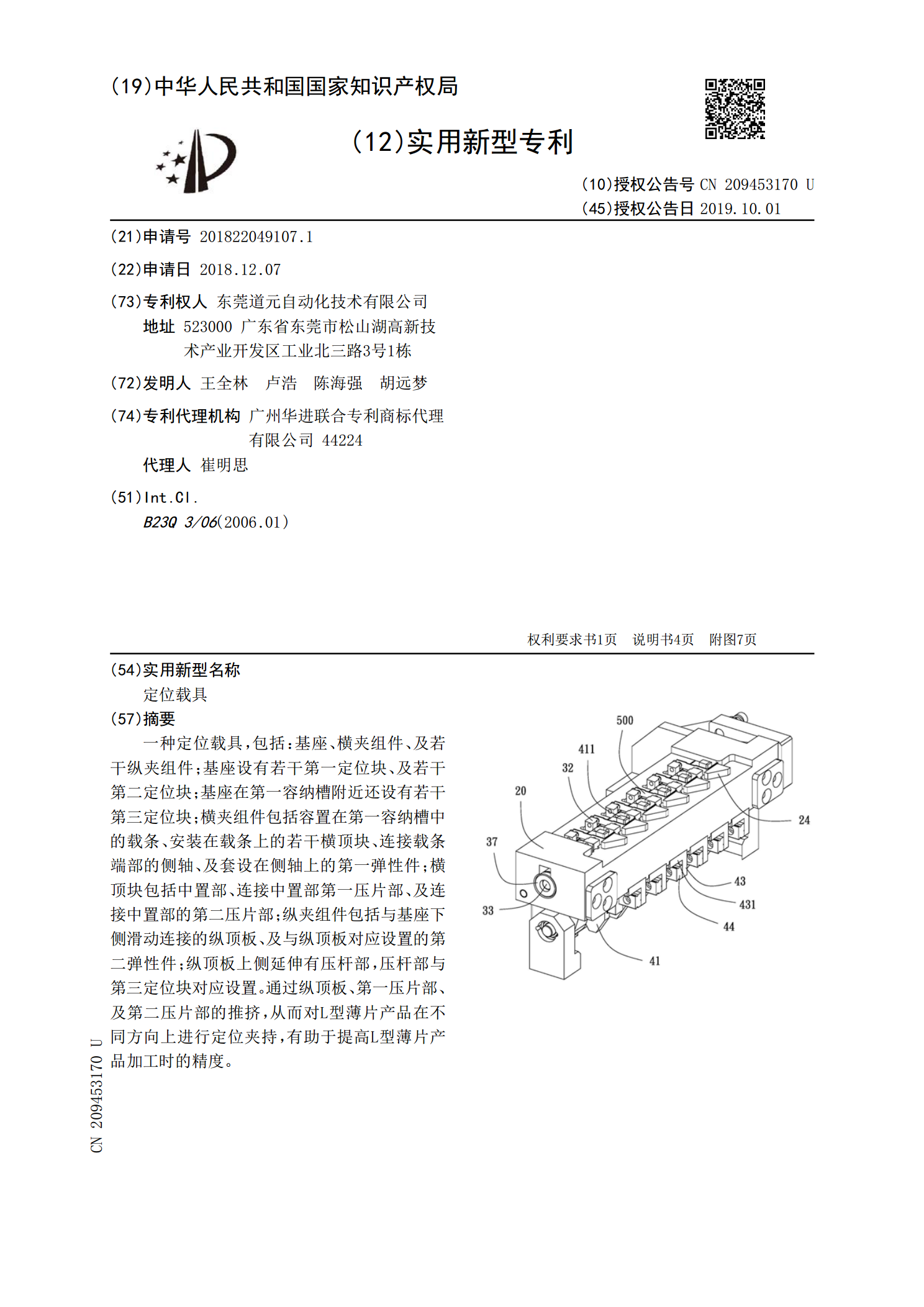
一种定位载具,包括:基座、横夹组件、及若干纵夹组件;基座设有若干第一定位块、及若干第二定位块;基座在第一容纳槽附近还设有若干第三定位块;横夹组件包括容置在第一容纳槽中的载条、安装在载条上的若干横顶块、连接载条端部的侧轴、及套设在侧轴上的第一弹性件;横顶块包括中置部、连接中置部第一压片部、及连接中置部的第二压片部;纵夹组件包括与基座下侧滑动连接的纵顶板、及与纵顶板对应设置的第二弹性件;纵顶板上侧延伸有压杆部,压杆部与第三定位块对应设置。通过纵顶板、第一压片部、及第二压片部的推挤,从而对L型薄片产品在不同方向

载具末端设备的定位方法、装置、载具、存储介质和终端.pdf
本发明涉及载具末端设备的定位方法、装置、载具、存储介质和终端,打破常规方式,突破性的将载具视为虚拟机器人,将其旋转结构视为机器人的旋转关节,位移结构视为机器人的伸缩关节,构建载具的运动学模型,并计算每个旋转关节的旋量。在此基础上,能够根据载具末端设备的初始旋转姿态、初始位置、目标旋转姿态、目标位置和运动学模型以及每个旋转关节的旋量,精确计算出载具的旋转参数和位移参数,使得操作工人的工作从不断目测调节载具的反复劳动,转变为根据相应旋转参数和位移参数,将载具的各关节对准调节至相应参数,从而极大的降低了对安装工
在SLAM地图中重新定位移动载具的方法及移动载具.pdf
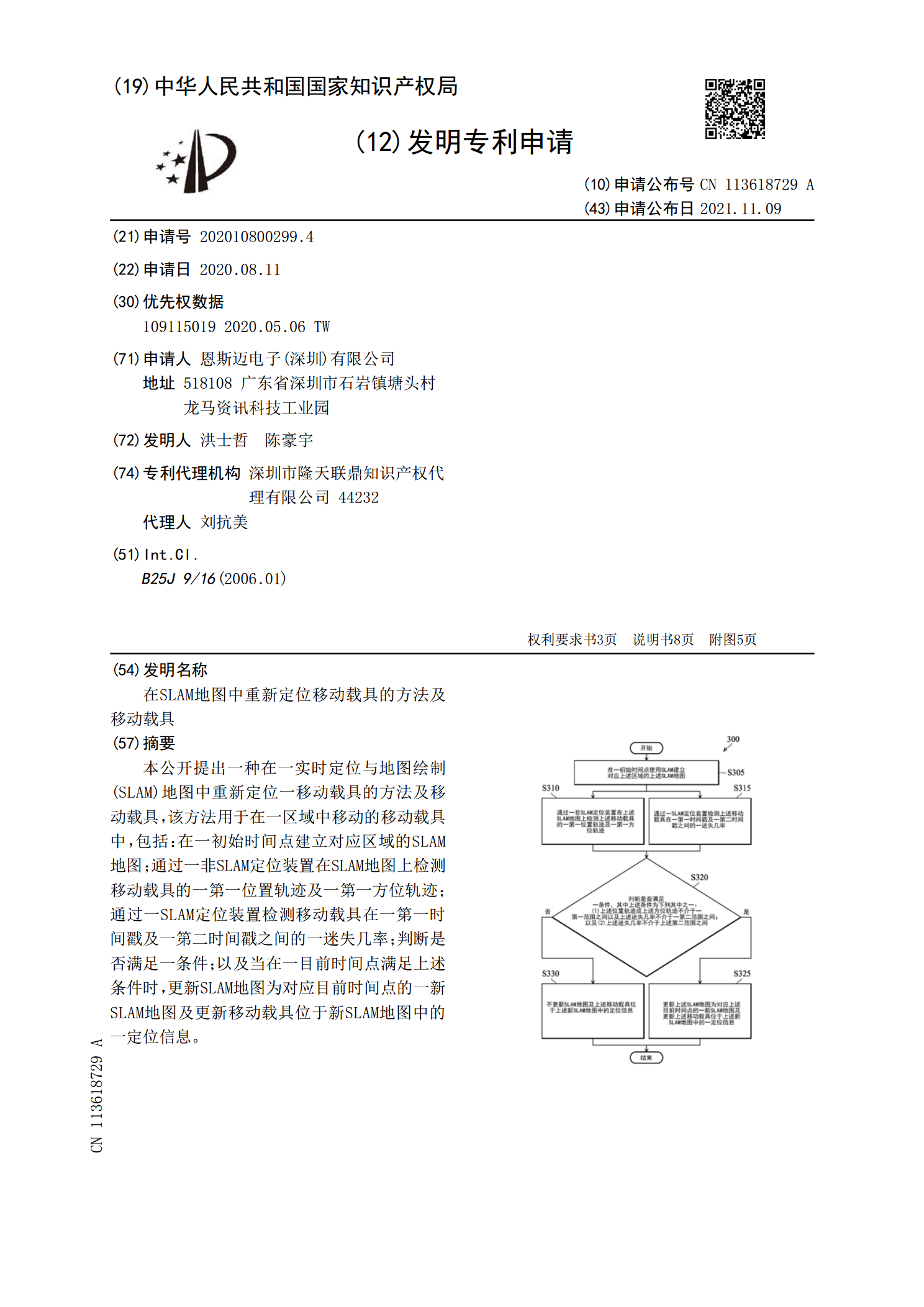
本公开提出一种在一实时定位与地图绘制(SLAM)地图中重新定位一移动载具的方法及移动载具,该方法用于在一区域中移动的移动载具中,包括:在一初始时间点建立对应区域的SLAM地图;通过一非SLAM定位装置在SLAM地图上检测移动载具的一第一位置轨迹及一第一方位轨迹;通过一SLAM定位装置检测移动载具在一第一时间戳及一第二时间戳之间的一迷失几率;判断是否满足一条件;以及当在一目前时间点满足上述条件时,更新SLAM地图为对应目前时间点的一新SLAM地图及更新移动载具位于新SLAM地图中的一定位信息。
旋转侧向定位机构及儿童载具.pdf
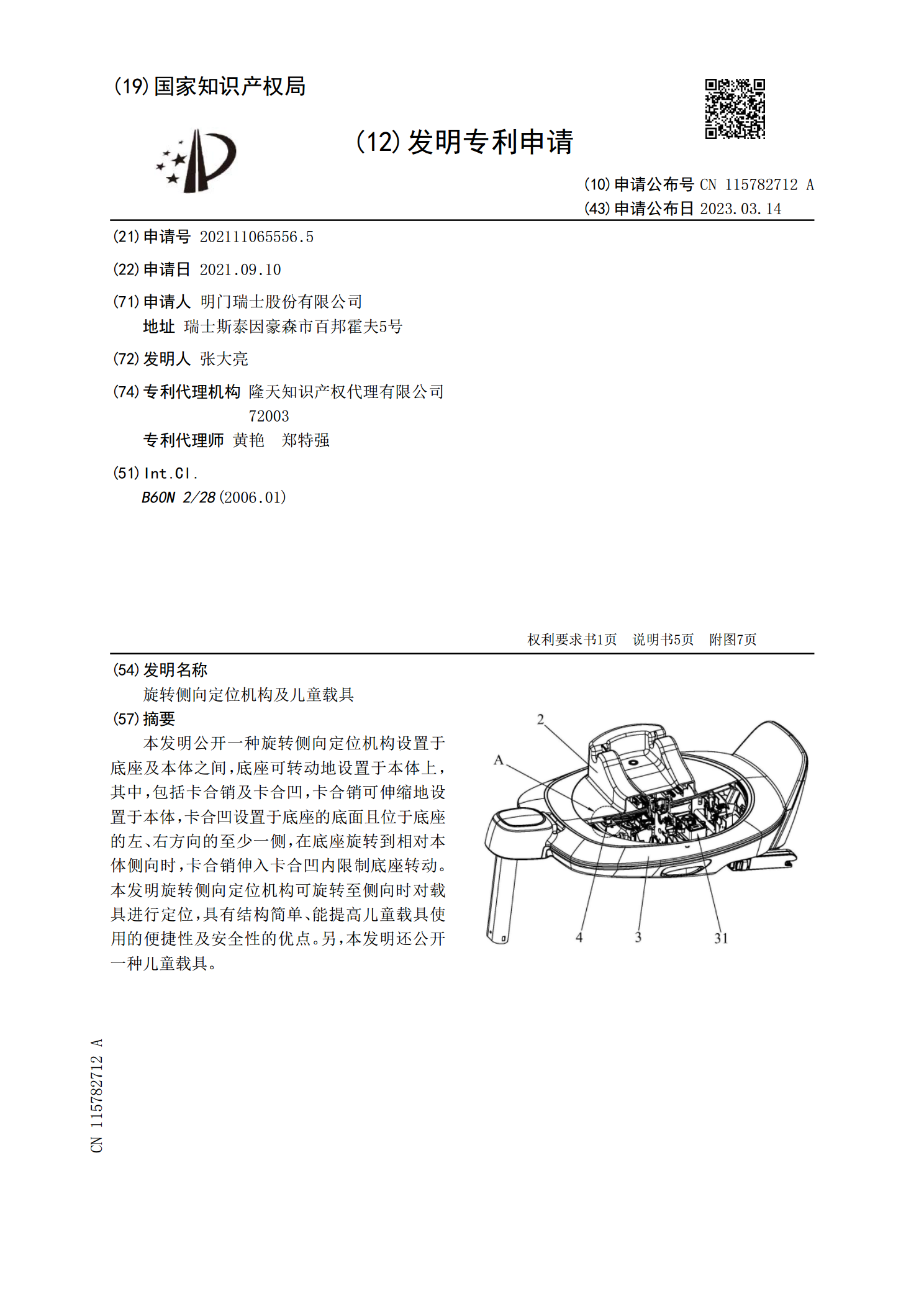
本发明公开一种旋转侧向定位机构设置于底座及本体之间,底座可转动地设置于本体上,其中,包括卡合销及卡合凹,卡合销可伸缩地设置于本体,卡合凹设置于底座的底面且位于底座的左、右方向的至少一侧,在底座旋转到相对本体侧向时,卡合销伸入卡合凹内限制底座转动。本发明旋转侧向定位机构可旋转至侧向时对载具进行定位,具有结构简单、能提高儿童载具使用的便捷性及安全性的优点。另,本发明还公开一种儿童载具。