
载具末端设备的定位方法、装置、载具、存储介质和终端.pdf

一吃****仪凡


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

载具末端设备的定位方法、装置、载具、存储介质和终端.pdf
本发明涉及载具末端设备的定位方法、装置、载具、存储介质和终端,打破常规方式,突破性的将载具视为虚拟机器人,将其旋转结构视为机器人的旋转关节,位移结构视为机器人的伸缩关节,构建载具的运动学模型,并计算每个旋转关节的旋量。在此基础上,能够根据载具末端设备的初始旋转姿态、初始位置、目标旋转姿态、目标位置和运动学模型以及每个旋转关节的旋量,精确计算出载具的旋转参数和位移参数,使得操作工人的工作从不断目测调节载具的反复劳动,转变为根据相应旋转参数和位移参数,将载具的各关节对准调节至相应参数,从而极大的降低了对安装工

载具控制方法、载具、装置、搬运设备.pdf
本发明实施例提供了一种载具控制方法、载具、装置、搬运设备,属于仓储技术领域,旨在延长载具的工作时长,提高电量的利用率,所述方法包括:检测所述载具的工作状态;根据所述载具的工作状态,确定所述载具是否需要休眠;在确定所述载具需要休眠时,根据所述载具的工作状态,控制所述载具上配置的至少部分部件进入休眠状态。

定位载具.pdf
本发明涉及一种定位载具,包括基座及夹紧机构。沿基座的周向设置有定位台阶,定位台阶具有第一承载面及第二承载面。利用定位台阶能够承载曲面薄壁件。而且,由于定位台阶的第一承载面被构造成曲面薄壁件的厚度面的仿形面,第二承载面被构造成曲面薄壁件的内表面的仿形面,故通过将厚度面承靠于第一承载面及内表面承靠于第二承载,便可对曲面薄壁件在基座上进行定位。接着,操作夹紧机构并使夹紧块与承载于定位台阶的曲面薄壁件的外表面抵持,便可对曲面薄壁件实现夹紧。可见,上定位载具在定位曲面薄壁件时,既不会留下吸痕也不会对内表面造成破坏。
定位载具.pdf
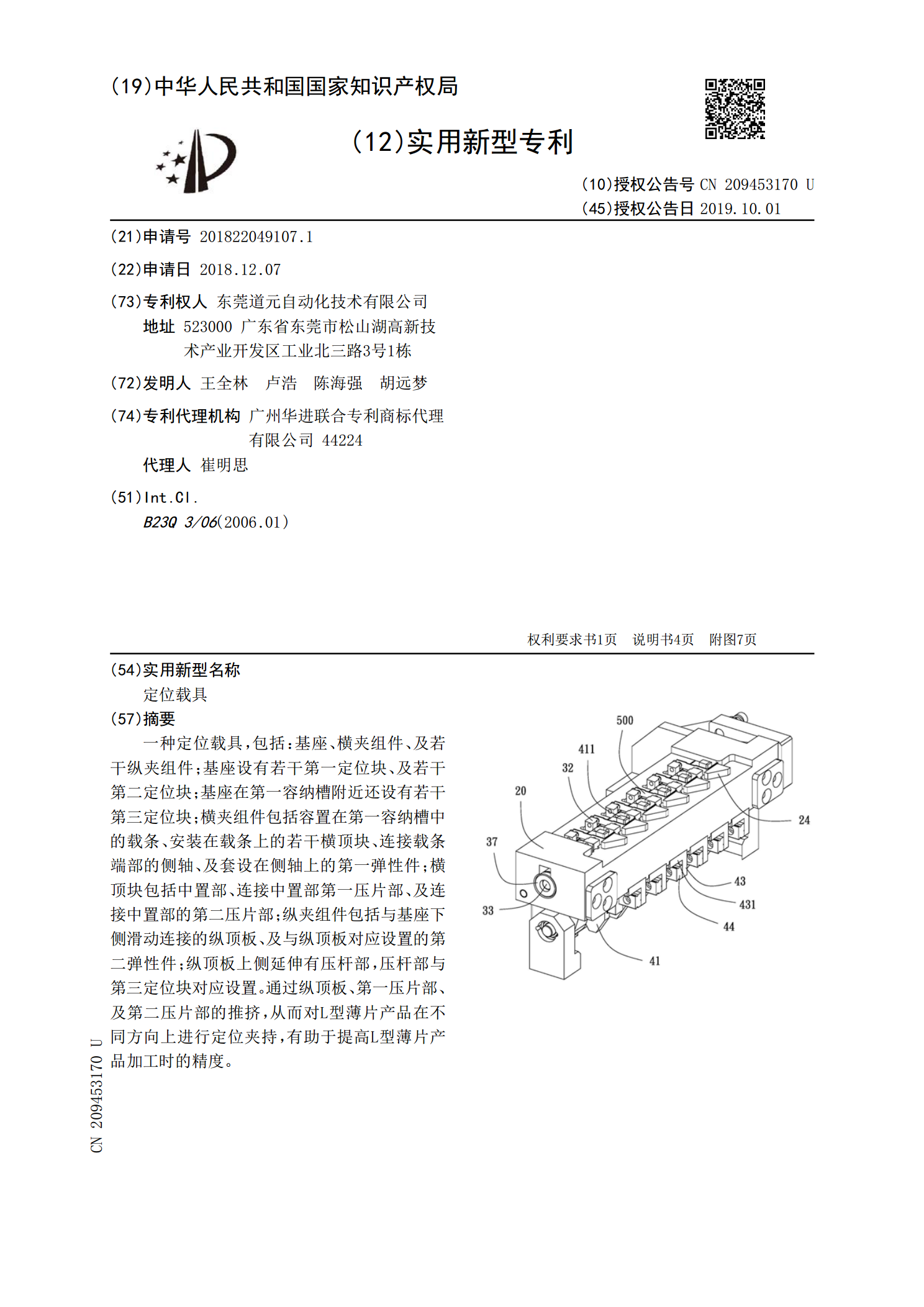
一种定位载具,包括:基座、横夹组件、及若干纵夹组件;基座设有若干第一定位块、及若干第二定位块;基座在第一容纳槽附近还设有若干第三定位块;横夹组件包括容置在第一容纳槽中的载条、安装在载条上的若干横顶块、连接载条端部的侧轴、及套设在侧轴上的第一弹性件;横顶块包括中置部、连接中置部第一压片部、及连接中置部的第二压片部;纵夹组件包括与基座下侧滑动连接的纵顶板、及与纵顶板对应设置的第二弹性件;纵顶板上侧延伸有压杆部,压杆部与第三定位块对应设置。通过纵顶板、第一压片部、及第二压片部的推挤,从而对L型薄片产品在不同方向
电动载具及电动载具操控方法.pdf
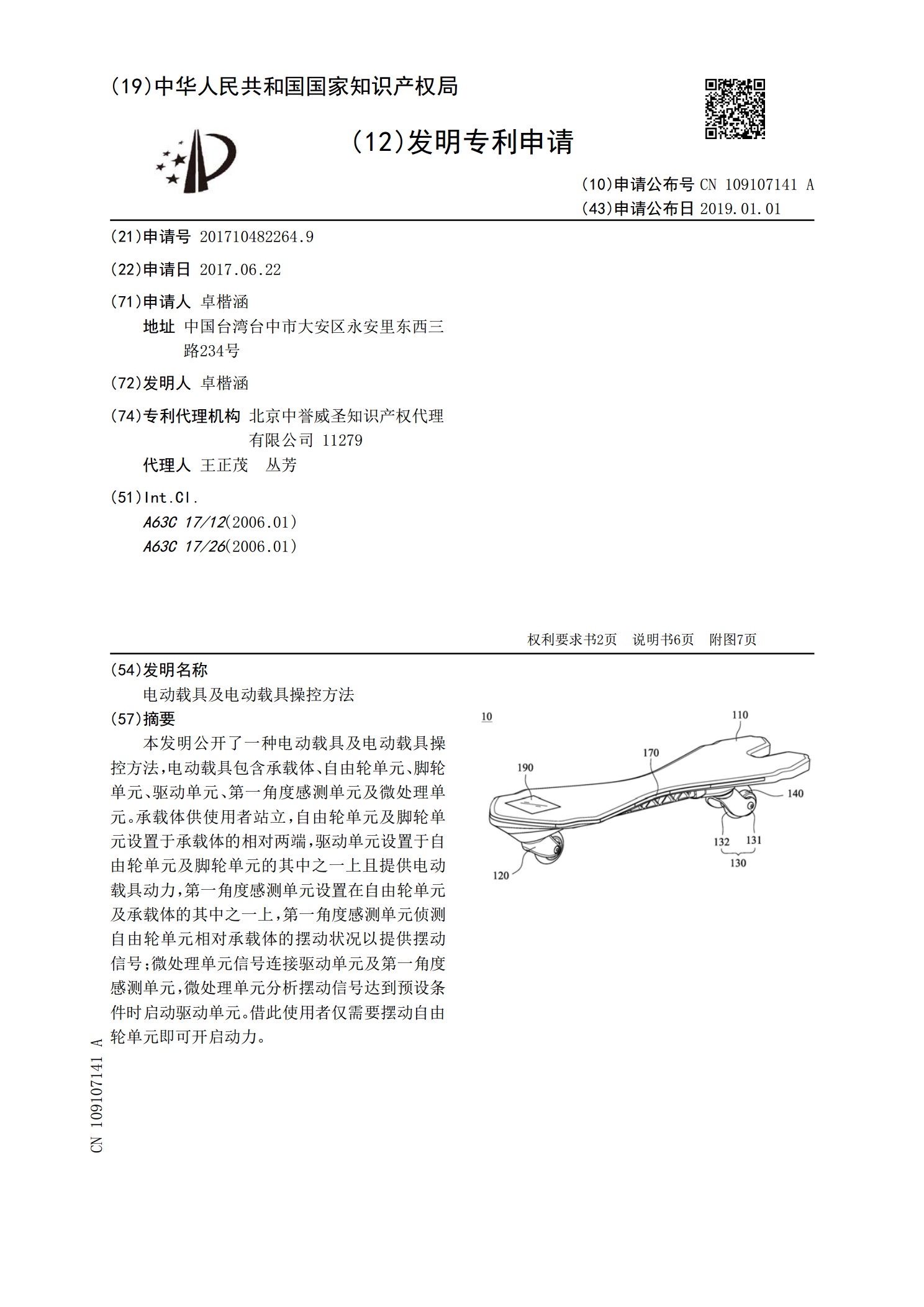
本发明公开了一种电动载具及电动载具操控方法,电动载具包含承载体、自由轮单元、脚轮单元、驱动单元、第一角度感测单元及微处理单元。承载体供使用者站立,自由轮单元及脚轮单元设置于承载体的相对两端,驱动单元设置于自由轮单元及脚轮单元的其中之一上且提供电动载具动力,第一角度感测单元设置在自由轮单元及承载体的其中之一上,第一角度感测单元侦测自由轮单元相对承载体的摆动状况以提供摆动信号;微处理单元信号连接驱动单元及第一角度感测单元,微处理单元分析摆动信号达到预设条件时启动驱动单元。借此使用者仅需要摆动自由轮单元即可开启