
一种果实平留梗采摘的机器人末端执行器及作业方法.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种果实平留梗采摘的机器人末端执行器及作业方法.pdf
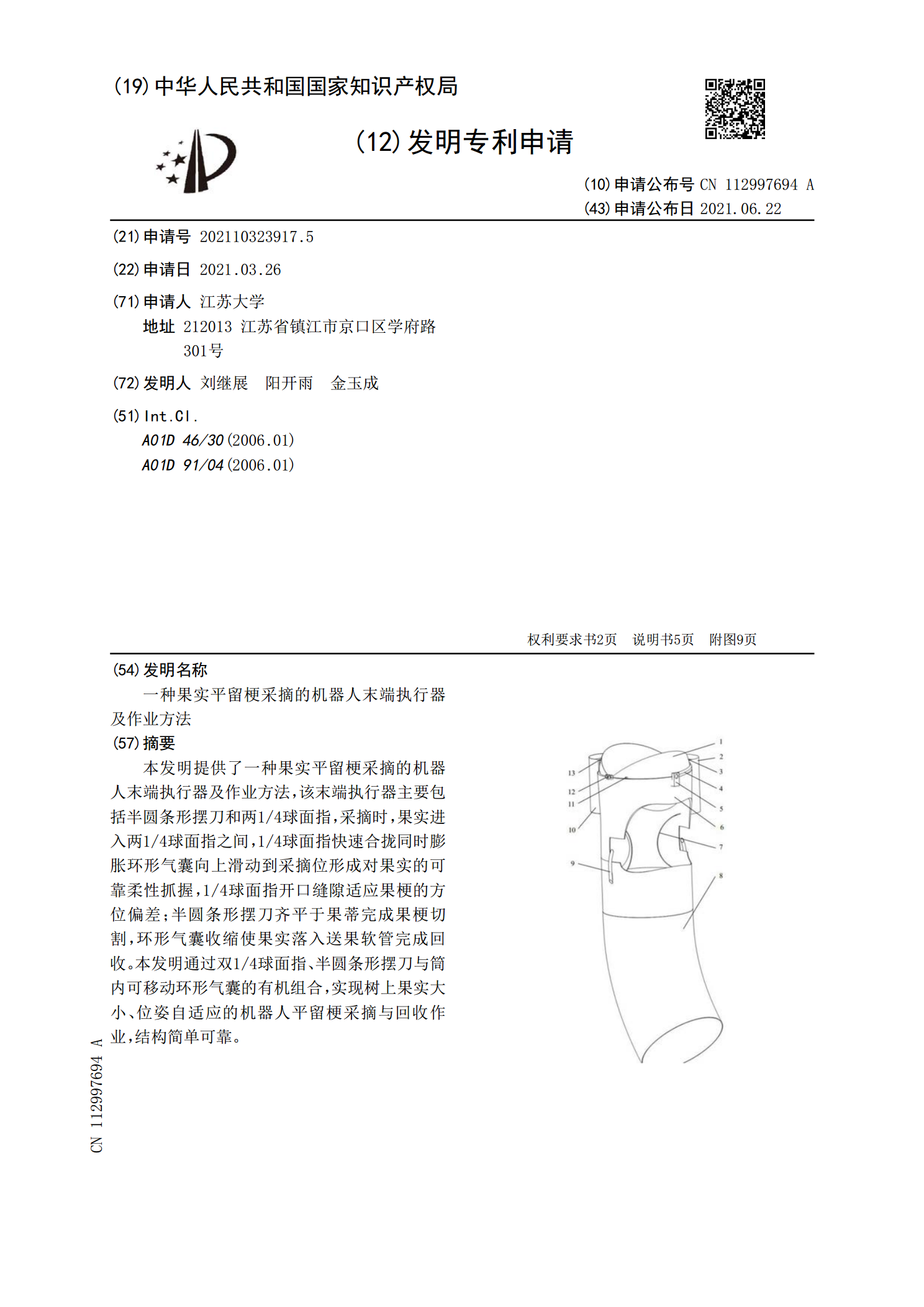
本发明提供了一种果实平留梗采摘的机器人末端执行器及作业方法,该末端执行器主要包括半圆条形摆刀和两1/4球面指,采摘时,果实进入两1/4球面指之间,1/4球面指快速合拢同时膨胀环形气囊向上滑动到采摘位形成对果实的可靠柔性抓握,1/4球面指开口缝隙适应果梗的方位偏差;半圆条形摆刀齐平于果蒂完成果梗切割,环形气囊收缩使果实落入送果软管完成回收。本发明通过双1/4球面指、半圆条形摆刀与筒内可移动环形气囊的有机组合,实现树上果实大小、位姿自适应的机器人平留梗采摘与回收作业,结构简单可靠。
一种果实采摘机器人末端执行器.pdf
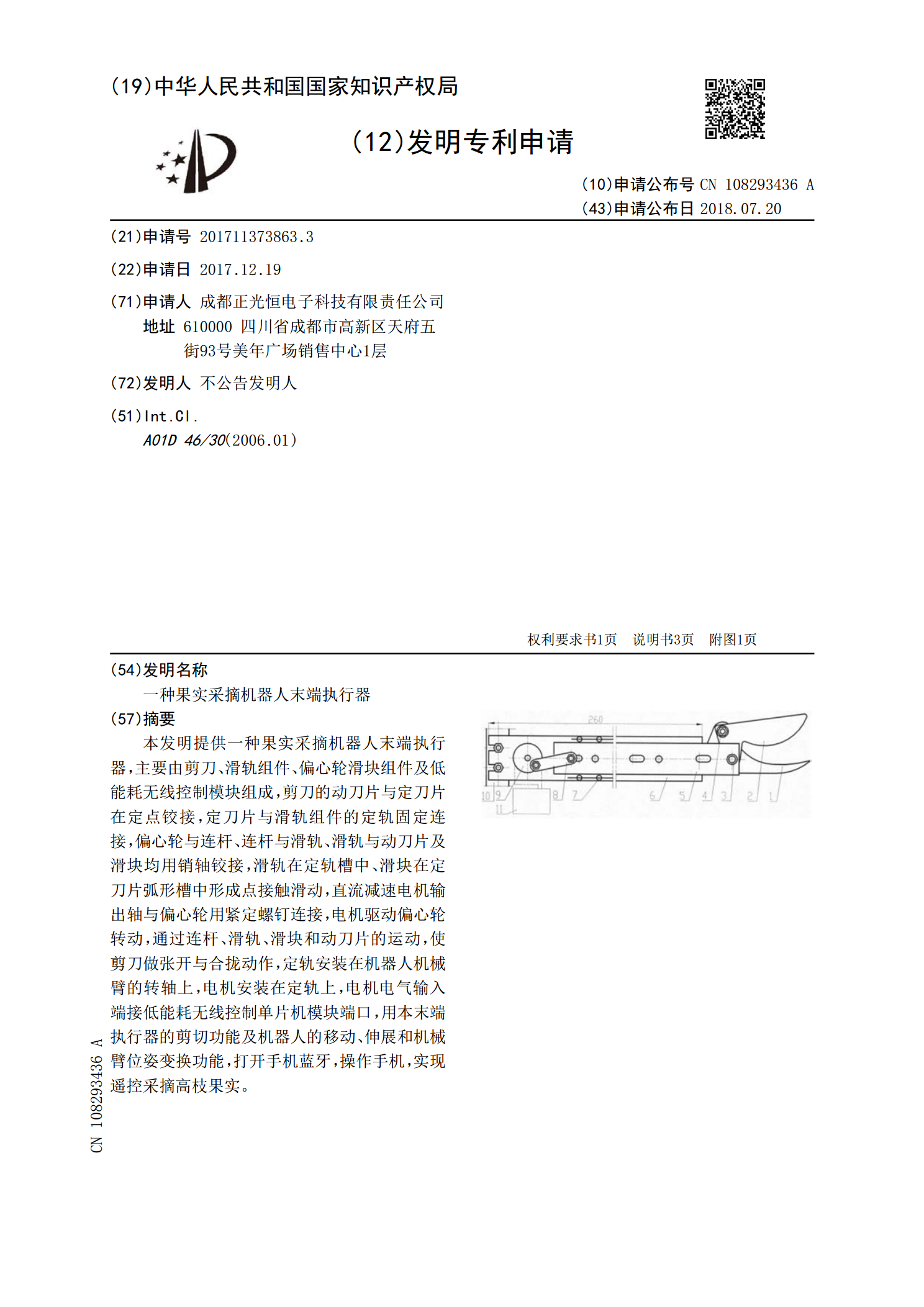
本发明提供一种果实采摘机器人末端执行器,主要由剪刀、滑轨组件、偏心轮滑块组件及低能耗无线控制模块组成,剪刀的动刀片与定刀片在定点铰接,定刀片与滑轨组件的定轨固定连接,偏心轮与连杆、连杆与滑轨、滑轨与动刀片及滑块均用销轴铰接,滑轨在定轨槽中、滑块在定刀片弧形槽中形成点接触滑动,直流减速电机输出轴与偏心轮用紧定螺钉连接,电机驱动偏心轮转动,通过连杆、滑轨、滑块和动刀片的运动,使剪刀做张开与合拢动作,定轨安装在机器人机械臂的转轴上,电机安装在定轨上,电机电气输入端接低能耗无线控制单片机模块端口,用本末端执行器的
一种果实采摘机器人末端执行器.pdf
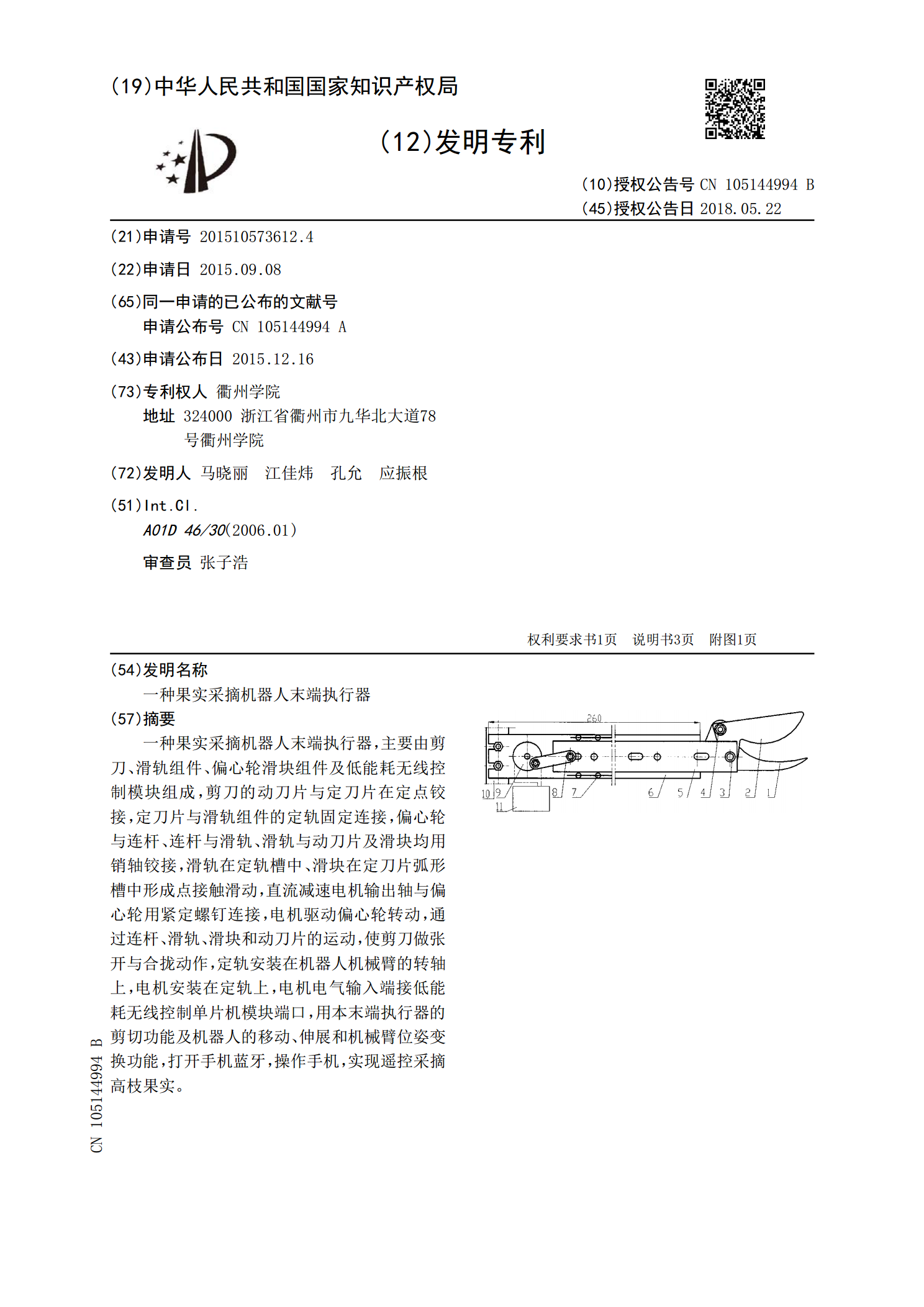
一种果实采摘机器人末端执行器,主要由剪刀、滑轨组件、偏心轮滑块组件及低能耗无线控制模块组成,剪刀的动刀片与定刀片在定点铰接,定刀片与滑轨组件的定轨固定连接,偏心轮与连杆、连杆与滑轨、滑轨与动刀片及滑块均用销轴铰接,滑轨在定轨槽中、滑块在定刀片弧形槽中形成点接触滑动,直流减速电机输出轴与偏心轮用紧定螺钉连接,电机驱动偏心轮转动,通过连杆、滑轨、滑块和动刀片的运动,使剪刀做张开与合拢动作,定轨安装在机器人机械臂的转轴上,电机安装在定轨上,电机电气输入端接低能耗无线控制单片机模块端口,用本末端执行器的剪切功能及

一种用于果实采摘机器人的末端执行器.pdf
本发明提供一种用于果实采摘机器人的末端执行器,包括固定底座、腕部翻转机构、俯仰机构、切割机构,腕部翻转机构同轴套接在固定底座上,固定底座一侧固定齿轮,腕部翻转机构上安装腕部翻转电机,驱动与固定底座上的齿轮相啮合的齿轮转动,腕部翻转机构上固联一侧板,用于支撑俯仰机构,侧板上固定俯仰电机,俯仰机构包括一平面连杆四杆机构,俯仰电机驱动其中一连杆转动,带动与另一连杆固联的俯仰平板转动,切割机构固定在俯仰平板上,切割机构包括通过同步带连接的锯片驱动电机与锯片转轴,锯片驱动电机转动通过同步带传递至锯片转轴,带动固定在
番茄果实串采摘末端执行器及其采摘方法.pdf
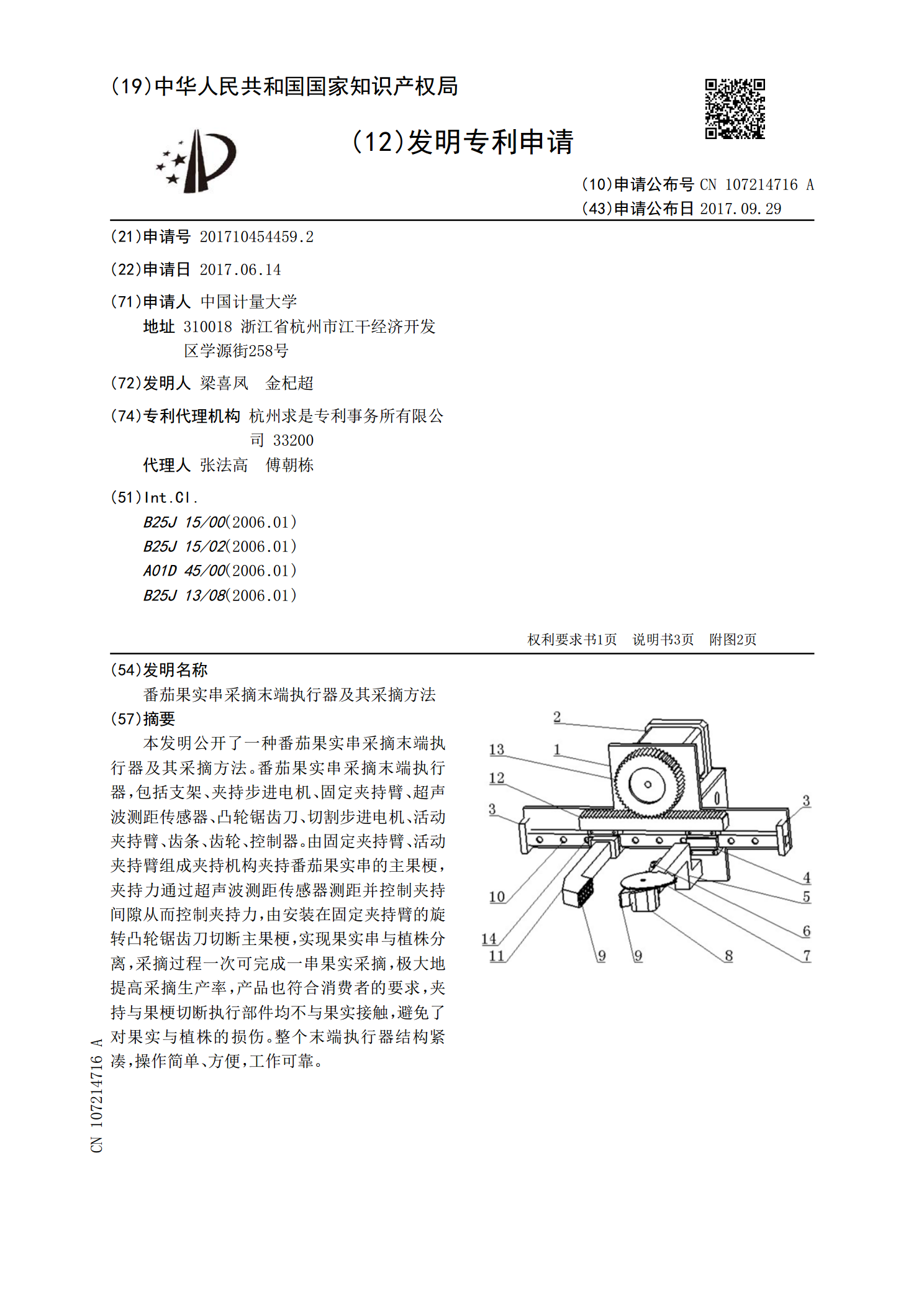
本发明公开了一种番茄果实串采摘末端执行器及其采摘方法。番茄果实串采摘末端执行器,包括支架、夹持步进电机、固定夹持臂、超声波测距传感器、凸轮锯齿刀、切割步进电机、活动夹持臂、齿条、齿轮、控制器。由固定夹持臂、活动夹持臂组成夹持机构夹持番茄果实串的主果梗,夹持力通过超声波测距传感器测距并控制夹持间隙从而控制夹持力,由安装在固定夹持臂的旋转凸轮锯齿刀切断主果梗,实现果实串与植株分离,采摘过程一次可完成一串果实采摘,极大地提高采摘生产率,产品也符合消费者的要求,夹持与果梗切断执行部件均不与果实接触,避免了对果实与