
一种颗粒料自动拆包上料方法.pdf

书生****文章


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种颗粒料自动拆包上料方法.pdf
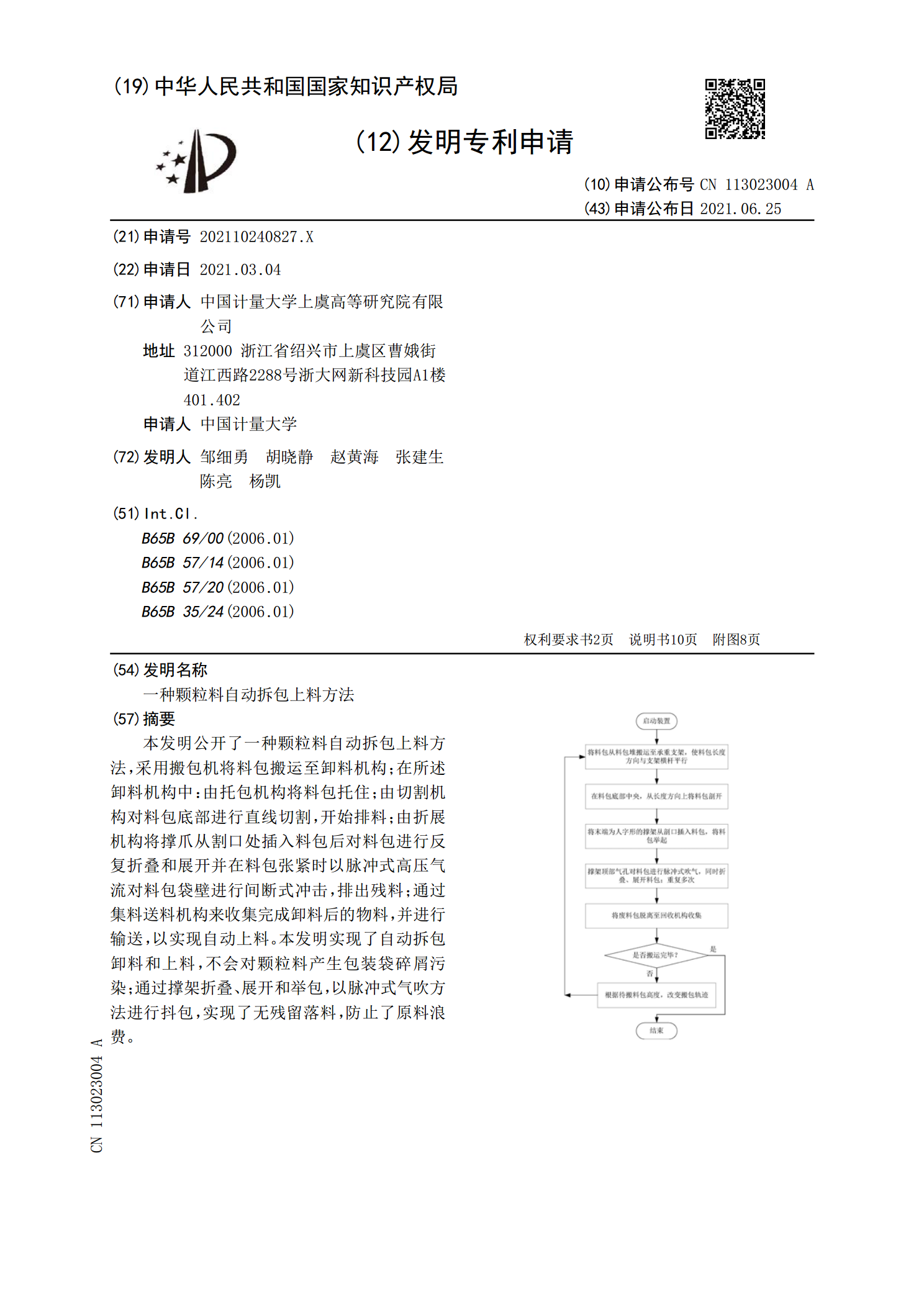
本发明公开了一种颗粒料自动拆包上料方法,采用搬包机将料包搬运至卸料机构;在所述卸料机构中:由托包机构将料包托住;由切割机构对料包底部进行直线切割,开始排料;由折展机构将撑爪从割口处插入料包后对料包进行反复折叠和展开并在料包张紧时以脉冲式高压气流对料包袋壁进行间断式冲击,排出残料;通过集料送料机构来收集完成卸料后的物料,并进行输送,以实现自动上料。本发明实现了自动拆包卸料和上料,不会对颗粒料产生包装袋碎屑污染;通过撑架折叠、展开和举包,以脉冲式气吹方法进行抖包,实现了无残留落料,防止了原料浪费。

颗粒料自动拆包上料装置及卸料机构.pdf
本发明公开了一种颗粒料自动拆包上料装置及卸料机构,上料装置包括:搬包机,用于自动搬运料包,并向卸料机构输送;卸料机构,对料包一侧袋壁进行自动切割后,举高料包并通过反复折叠、展开料包和以脉冲式高压气流对料包袋壁进行间断式冲击来排空料包,以实现自动卸料;集料送料机构,用以收集完成卸料后的物料,并进行输送,以实现自动上料。本发明实现了自动拆包卸料和上料,不会对颗粒料产生包装袋碎屑污染;通过撑架折叠、展开和举包,以脉冲式气吹方法进行抖包,实现了无残留落料,防止了原料浪费。

基于振动除残料式的自动拆包上料方法.pdf
本发明公开了一种基于振动除残料式的自动拆包上料方法,包括以下步骤:将料包搬至传送带上;所述传送带的表面倾斜向上,并在传送带上设置用于检测料包的第一料包传感器;在传动带的下方设置集料器,收集物料后再进行上料;料包进入传送带前端位置,通过安装于传送带的前端附近的切割机构,对料包的下侧边中部进行切割;切割后的料包继续传送,当检测到料包到达传送带后端的预定位置,位于所述传送带的后端的振包机构工作,振动和拍打料包以促进残料排出;在振包机构振动和拍打料包时,拖包机构抓住料包并拖动其前行,在排空残料时将料包拖离传送带。

一种气动拍袋式自动拆包上料方法.pdf
本发明公开了一种气动拍袋式自动拆包上料方法,将料包搬运至传送带上;再倾斜向下地将料袋送至竖直放置的切包仓,并在切包仓底部和两侧分别设置供穿行的间隔;待料袋到达切包仓,采用切割机构对料袋进行切割拆包;切割完后,水平弹出叉针,使叉针头部穿透料袋后与对侧的叉针配体卡合以对料袋进行穿挂和限位;通过叉针上可控气流气孔向料袋内喷射脉冲气流,同时还通过无动力拍杆在外侧对鼓胀波动的料袋进行被动拍打,排出残料;通过集料送料机构来收集卸下的物料,并进行输送,以实现自动上料。本发明实现了自动拆包上料,通过脉冲气吹和拍杆被动挤压
一种波动抖袋式自动拆包上料方法.pdf
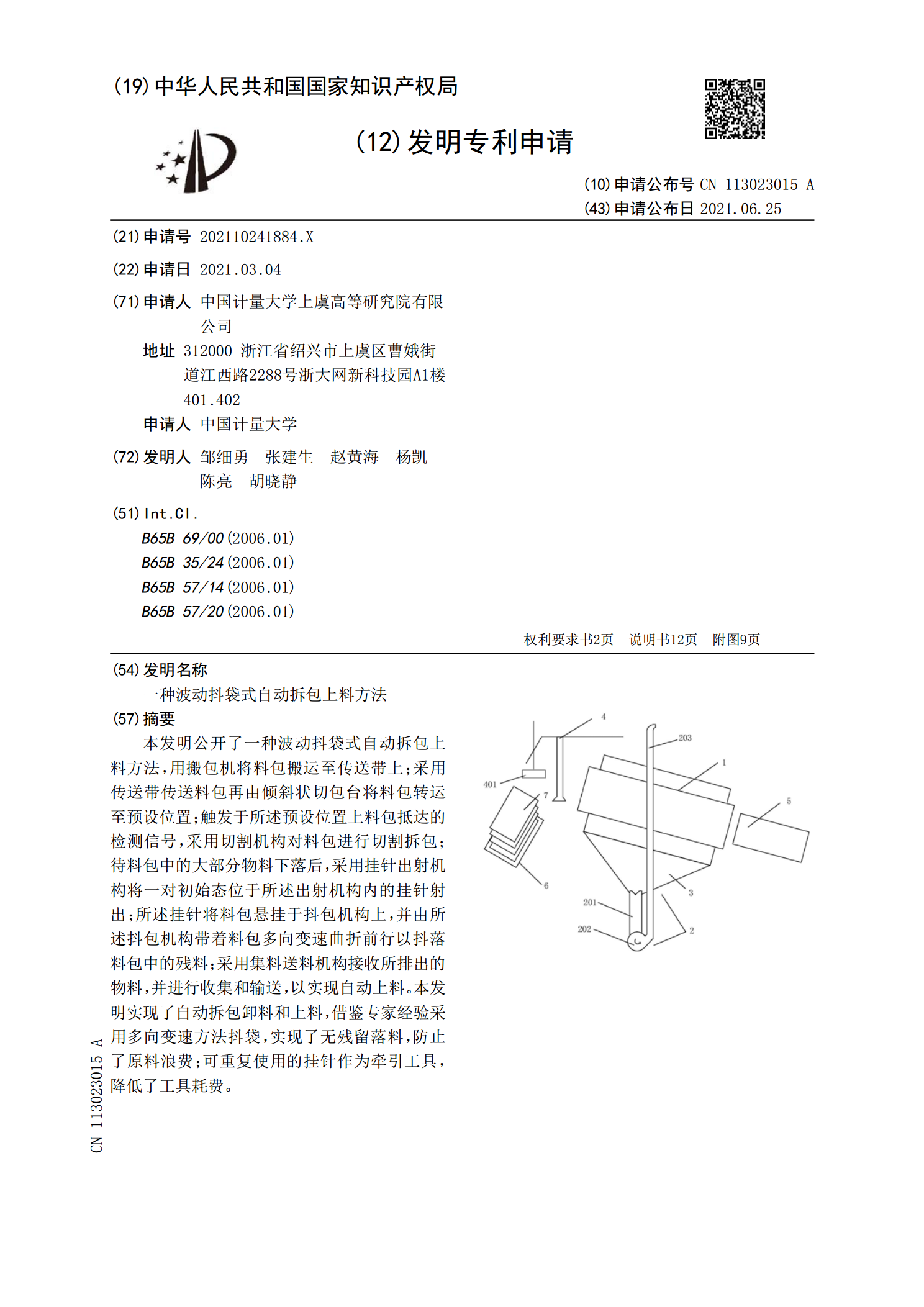
本发明公开了一种波动抖袋式自动拆包上料方法,用搬包机将料包搬运至传送带上;采用传送带传送料包再由倾斜状切包台将料包转运至预设位置;触发于所述预设位置上料包抵达的检测信号,采用切割机构对料包进行切割拆包;待料包中的大部分物料下落后,采用挂针出射机构将一对初始态位于所述出射机构内的挂针射出;所述挂针将料包悬挂于抖包机构上,并由所述抖包机构带着料包多向变速曲折前行以抖落料包中的残料;采用集料送料机构接收所排出的物料,并进行收集和输送,以实现自动上料。本发明实现了自动拆包卸料和上料,借鉴专家经验采用多向变速方法抖