
一种免停留充电可旋转式管廊巡检机器人及巡检系统.pdf

一吃****仪凡


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种免停留充电可旋转式管廊巡检机器人及巡检系统.pdf
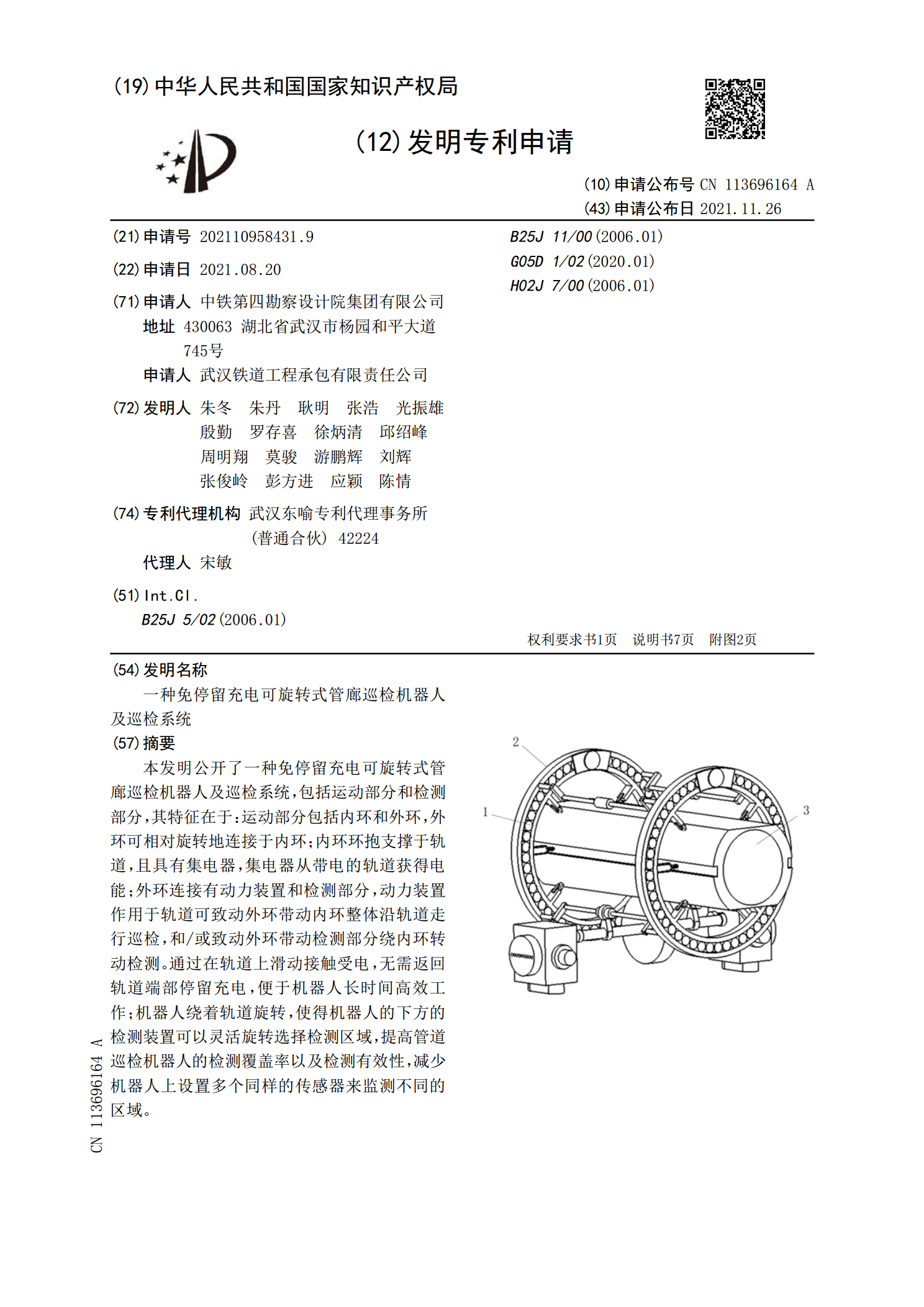
本发明公开了一种免停留充电可旋转式管廊巡检机器人及巡检系统,包括运动部分和检测部分,其特征在于:运动部分包括内环和外环,外环可相对旋转地连接于内环;内环环抱支撑于轨道,且具有集电器,集电器从带电的轨道获得电能;外环连接有动力装置和检测部分,动力装置作用于轨道可致动外环带动内环整体沿轨道走行巡检,和/或致动外环带动检测部分绕内环转动检测。通过在轨道上滑动接触受电,无需返回轨道端部停留充电,便于机器人长时间高效工作;机器人绕着轨道旋转,使得机器人的下方的检测装置可以灵活旋转选择检测区域,提高管道巡检机器人的检

一种管廊巡检机器人巡检系统及方法.pdf
本发明提供一种管廊巡检机器人巡检系统及方法,所述综合管廊巡检机器人巡检系统包括:机器人本体、展示层、数据层、应用层、感知层;解决了由于管廊长度长,在采集图像时需要实时调整自己的监控角度,同时保证巡检快速,全面,准确。

一种综合管廊巡检机器人.pdf
本发明公开了一种综合管廊巡检机器人,包括机器人本体及其控制系统,所述机器人本体包括所述机器人本体底部设置的麦克纳姆轮驱动机构,后部设置的灭火执行机构,前部设置的升降监测机构,以及左右侧部设置的蛇形探测机构,本发明涉及巡检机器人技术领域,通过本综合管廊巡检机器人,解决了目前传统的人工巡检的巡检人员负担,并且可以弥补综合管廊监控系统只能定点监控的缺陷,进一步提高综合管廊监控管理能力,另外,机器人上搭载多种气体传感器,对工作人员进入综合管廊维修提供了安全保障。
一种综合管廊巡检机器人.pdf
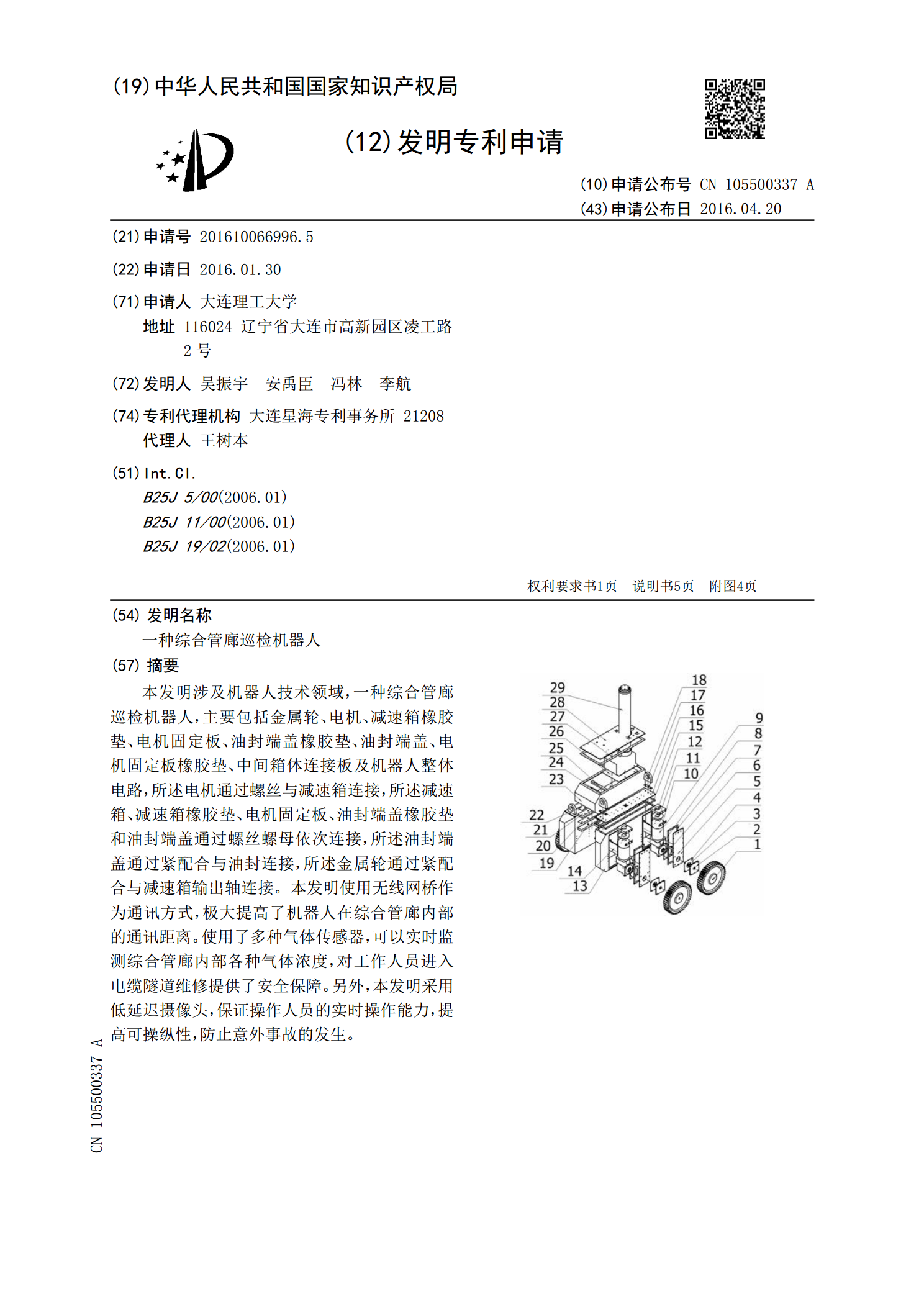
本发明涉及机器人技术领域,一种综合管廊巡检机器人,主要包括金属轮、电机、减速箱橡胶垫、电机固定板、油封端盖橡胶垫、油封端盖、电机固定板橡胶垫、中间箱体连接板及机器人整体电路,所述电机通过螺丝与减速箱连接,所述减速箱、减速箱橡胶垫、电机固定板、油封端盖橡胶垫和油封端盖通过螺丝螺母依次连接,所述油封端盖通过紧配合与油封连接,所述金属轮通过紧配合与减速箱输出轴连接。本发明使用无线网桥作为通讯方式,极大提高了机器人在综合管廊内部的通讯距离。使用了多种气体传感器,可以实时监测综合管廊内部各种气体浓度,对工作人员进入
一种智慧管廊机器人智能巡检综合管理系统.pdf
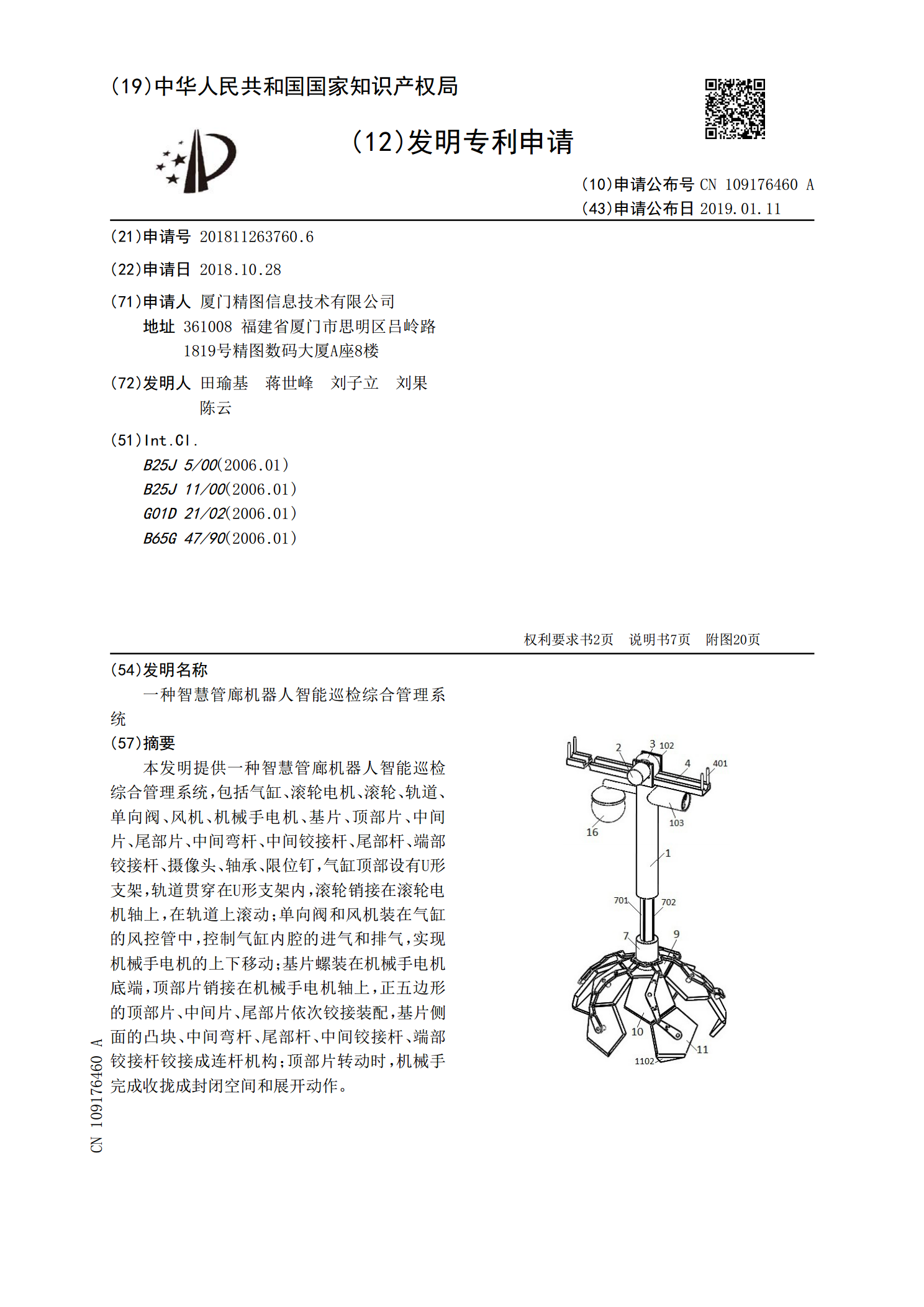
本发明提供一种智慧管廊机器人智能巡检综合管理系统,包括气缸、滚轮电机、滚轮、轨道、单向阀、风机、机械手电机、基片、顶部片、中间片、尾部片、中间弯杆、中间铰接杆、尾部杆、端部铰接杆、摄像头、轴承、限位钉,气缸顶部设有U形支架,轨道贯穿在U形支架内,滚轮销接在滚轮电机轴上,在轨道上滚动;单向阀和风机装在气缸的风控管中,控制气缸内腔的进气和排气,实现机械手电机的上下移动;基片螺装在机械手电机底端,顶部片销接在机械手电机轴上,正五边形的顶部片、中间片、尾部片依次铰接装配,基片侧面的凸块、中间弯杆、尾部杆、中间铰接