
一种基于超高压水的除锈机器人.pdf

雨巷****莺莺


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于超高压水的除锈机器人.pdf
本发明属于机器人领域,尤其是一种基于超高压水的除锈机器人,针对现有的除锈机器人由于喷头的喷射面积有限,导致除锈的效率较低,且通过高压水喷射除锈后往往还会留下锈蚀产生的斑迹影响美观的问题,现提出如下方案,其包括移动机器人主体,所述移动机器人主体的顶部固定连接有防护壳体,防护壳体内固定安装有电机,移动机器人主体的前端设置有高压水除锈机构,本发明在使用时可以有效增大高压水的喷射面积,提升除锈的效率,且可以同步对高压除锈后的部位再进行一次抛光打磨,有效的提升金属表面的除锈效果和光泽,且利用环绕的超声波雷达探头进行
超高压水除锈技术研发方案(一).pdf
超高压水除锈技术研发方案一、实施背景近年来,我国产业结构正在经历深刻的变革,其中,金属制造业、船舶工业、能源工业等与除锈技术紧密相关的行业正在迅猛发展。随着工业规模的扩大,设备腐蚀问题日益凸显,传统的人工打磨、化学除锈等方法已无法满足现代工业的效率和质量需求。在此背景下,我们提出超高压水除锈技术研发方案,旨在提高除锈效率,减少环境污染,降低人力成本,以满足现代工业的需求。二、工作原理超高压水除锈技术主要是利用超高压水的冲击力来清除金属表面的锈迹和氧化物。该技术的工作原理基于流体力学中的“水锤效应”,即当水

超高压水除锈在修船作业中的应用.docx
超高压水除锈在修船作业中的应用超高压水除锈在修船作业中的应用引言:船舶是海上运输的重要工具,但长时间的使用和水下海洋环境的侵蚀,会导致船舶表面产生生锈腐蚀的问题。船舶的生锈不仅影响船舶的外观,还会降低船舶的使用寿命和安全性。因此,除锈成为船舶维护保养的重要工作。传统的除锈方法往往效率低、成本高,并且对环境造成一定程度的污染。而超高压水除锈技术的出现,为船舶修船作业带来了新的解决方案。一、超高压水除锈技术的概述超高压水除锈是一种物理除锈方法,其基本原理是利用高压水束对锈蚀表面进行冲击和剥离。超高压水除锈技术
一种用于不同船舶外壁面的高压水除锈机器人.pdf
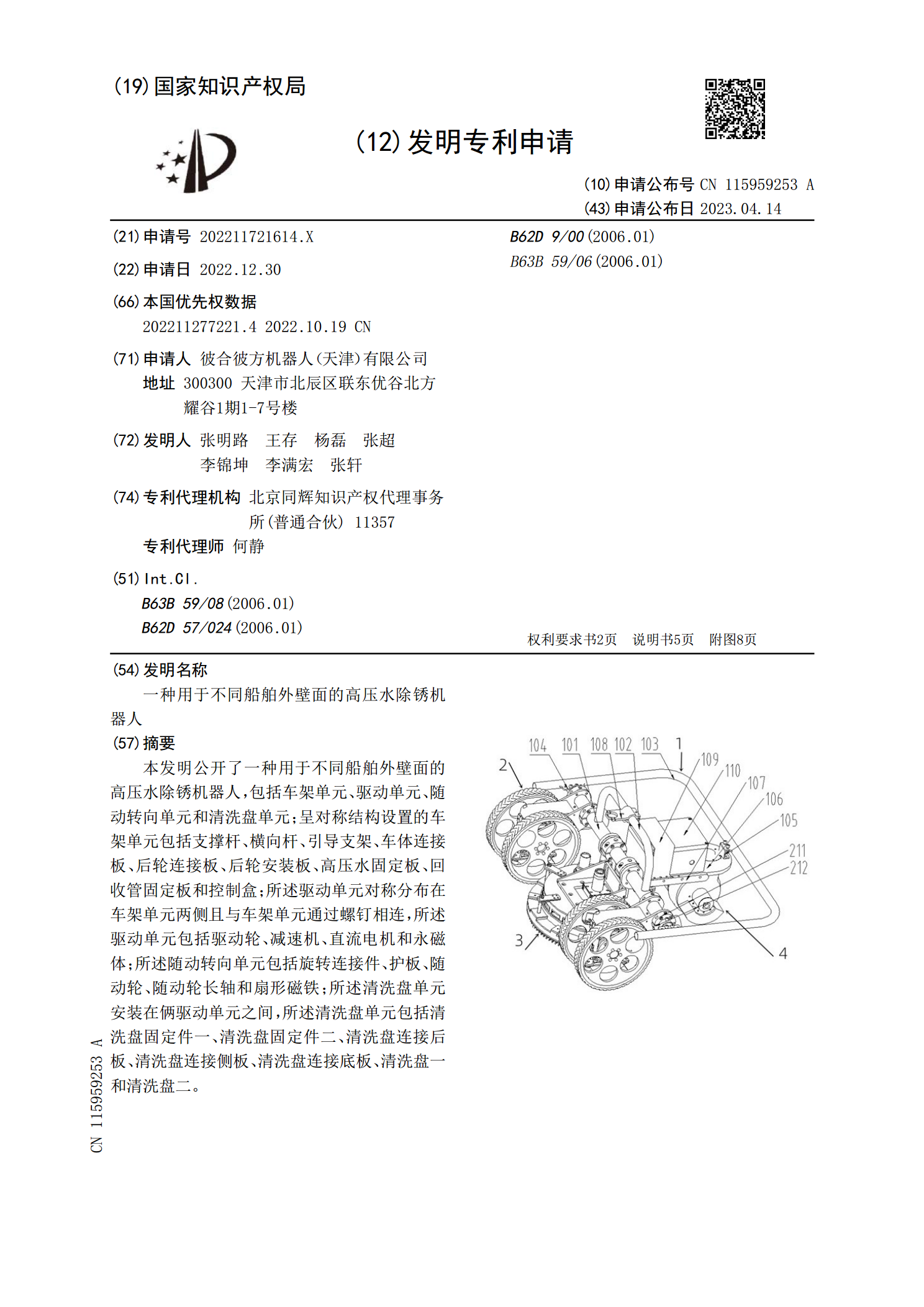
本发明公开了一种用于不同船舶外壁面的高压水除锈机器人,包括车架单元、驱动单元、随动转向单元和清洗盘单元;呈对称结构设置的车架单元包括支撑杆、横向杆、引导支架、车体连接板、后轮连接板、后轮安装板、高压水固定板、回收管固定板和控制盒;所述驱动单元对称分布在车架单元两侧且与车架单元通过螺钉相连,所述驱动单元包括驱动轮、减速机、直流电机和永磁体;所述随动转向单元包括旋转连接件、护板、随动轮、随动轮长轴和扇形磁铁;所述清洗盘单元安装在俩驱动单元之间,所述清洗盘单元包括清洗盘固定件一、清洗盘固定件二、清洗盘连接后板、

一种船舶除锈机器人.pdf
本发明属于船舶除锈领域,公开了一种船舶除锈机器人,能够减少吸附磁铁表面上吸附的锈屑,使得吸附磁铁始终保持有效的锈屑吸附力,也杜绝了聚合体锈屑的形成,包括承载基板、除锈单元、吸附磁铁以及刮擦组件,刮擦组件包括刮擦驱动件、刮擦配合件以及刮擦执行件,刮擦驱动件设置在除锈单元上,刮擦驱动件具有弧形驱动齿段,刮擦配合件可转动地设置在承载基板上,刮擦配合件具有与弧形驱动齿段啮合配合的弧形配合齿段,刮擦执行件与刮擦配合件机械耦合,并且刮擦执行件具有与吸附磁铁贴面配合的刮擦面,除锈单元带动刮擦驱动件同步摆动,使得刮擦配合