
一种基于机器视觉全自动PCB板打孔设备及打孔方法.pdf

宁馨****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于机器视觉全自动PCB板打孔设备及打孔方法.pdf
本发明提供一种基于机器视觉全自动PCB板打孔设备及打孔方法,涉及打孔设备领域。该基于机器视觉全自动PCB板打孔设备及打孔方法,包括底板,所述底板的顶端设置有PCB板,所述底板的顶端固定连接有平台移动轨道,所述底板的顶端固定连接有两个限位器固定板。通过PCB板的印刻信息,相机模组可识别其中的条形信息,并调出存储在PC主控机上的板型孔的个数信息及相对位置信息,实现多通道一次性打孔,可有效缩短打孔时间,通过采集PCB板上的图像数据,以灰度印刷圆形孔原点为中心,保留最大直径为5mm圆形图像,其余部分需将图像进行高
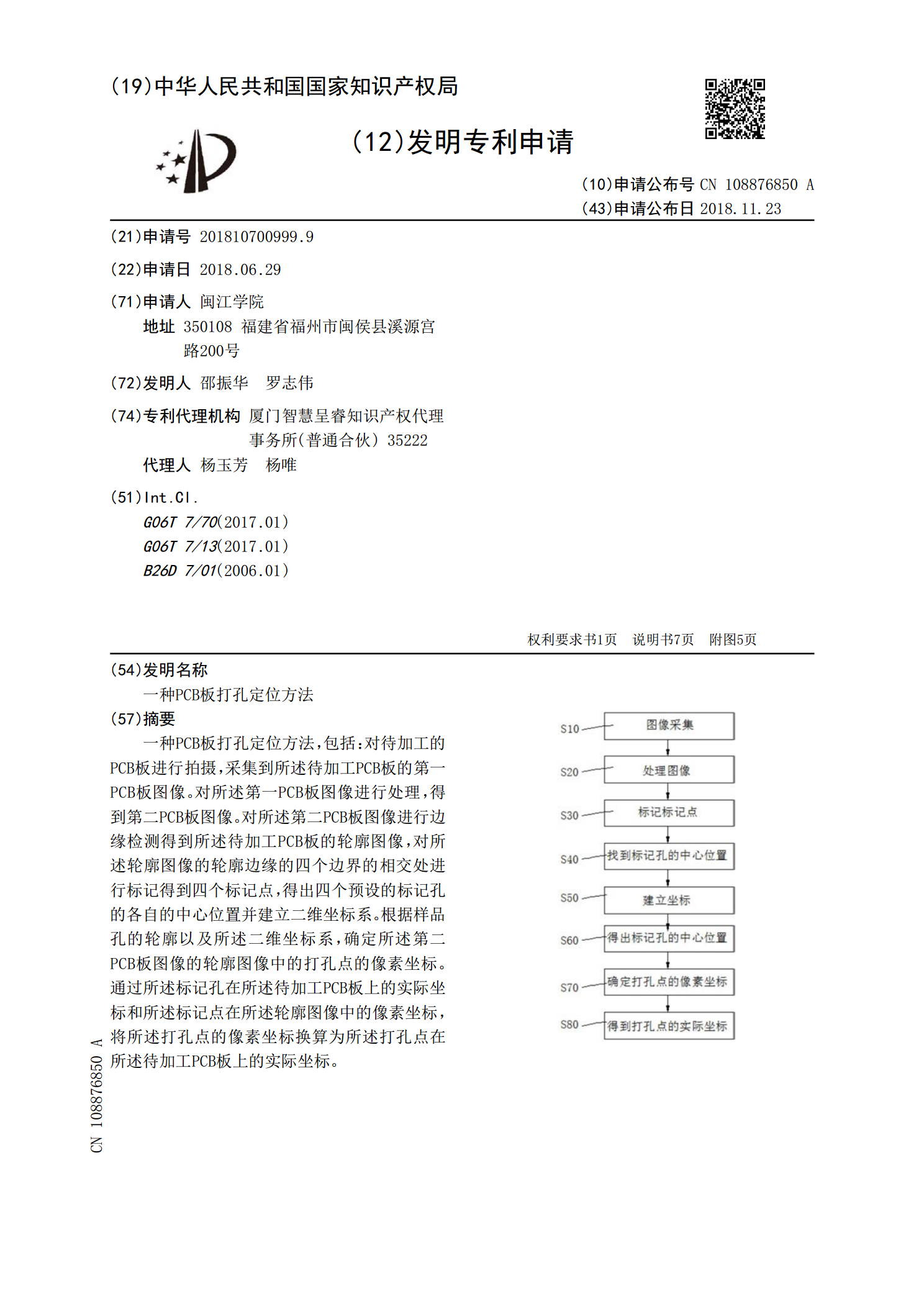
一种PCB板打孔定位方法.pdf
一种PCB板打孔定位方法,包括:对待加工的PCB板进行拍摄,采集到所述待加工PCB板的第一PCB板图像。对所述第一PCB板图像进行处理,得到第二PCB板图像。对所述第二PCB板图像进行边缘检测得到所述待加工PCB板的轮廓图像,对所述轮廓图像的轮廓边缘的四个边界的相交处进行标记得到四个标记点,得出四个预设的标记孔的各自的中心位置并建立二维坐标系。根据样品孔的轮廓以及所述二维坐标系,确定所述第二PCB板图像的轮廓图像中的打孔点的像素坐标。通过所述标记孔在所述待加工PCB板上的实际坐标和所述标记点在所述轮廓图像
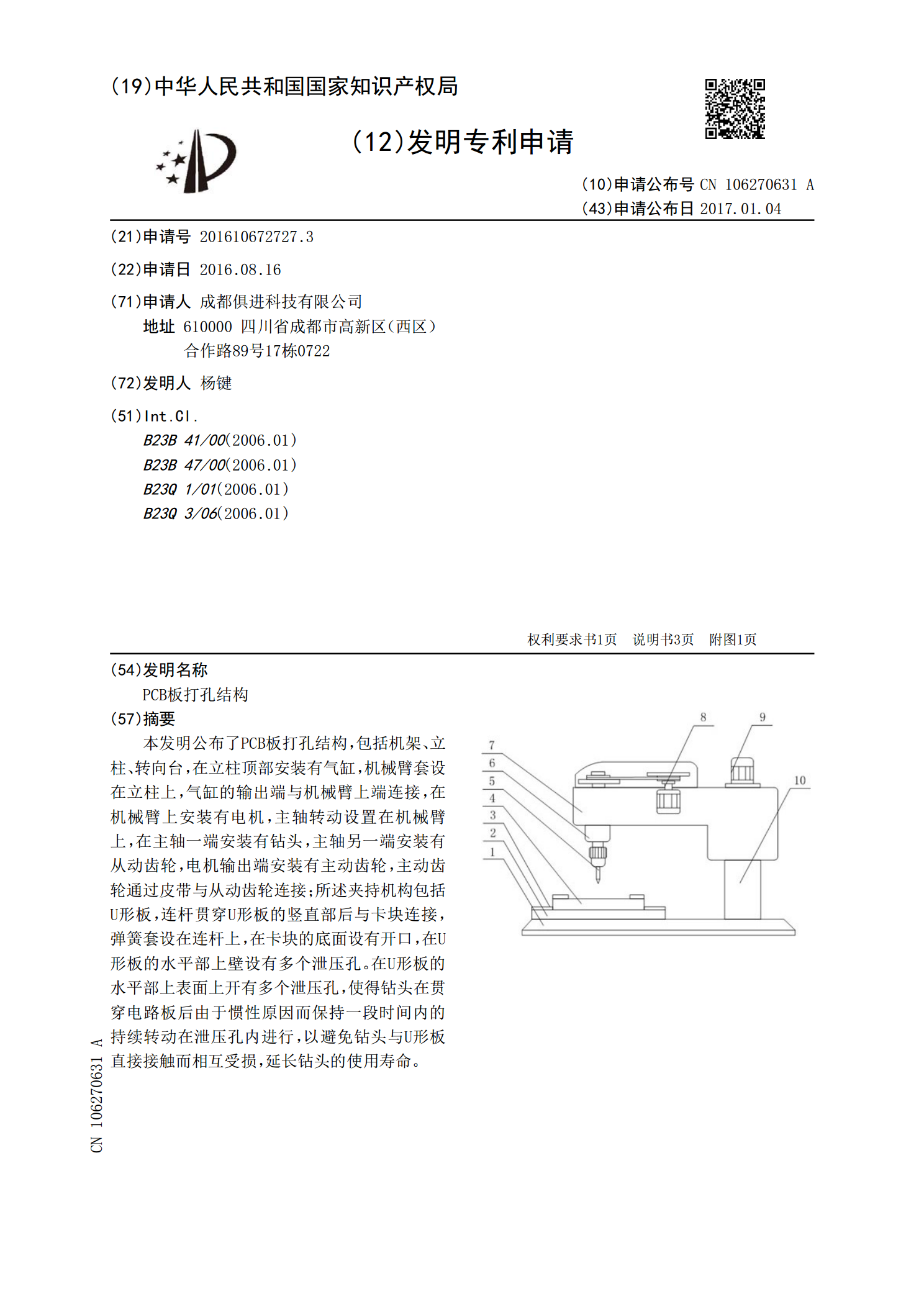
PCB板打孔结构.pdf
本发明公布了PCB板打孔结构,包括机架、立柱、转向台,在立柱顶部安装有气缸,机械臂套设在立柱上,气缸的输出端与机械臂上端连接,在机械臂上安装有电机,主轴转动设置在机械臂上,在主轴一端安装有钻头,主轴另一端安装有从动齿轮,电机输出端安装有主动齿轮,主动齿轮通过皮带与从动齿轮连接;所述夹持机构包括U形板,连杆贯穿U形板的竖直部后与卡块连接,弹簧套设在连杆上,在卡块的底面设有开口,在U形板的水平部上壁设有多个泄压孔。在U形板的水平部上表面上开有多个泄压孔,使得钻头在贯穿电路板后由于惯性原因而保持一段时间内的持续
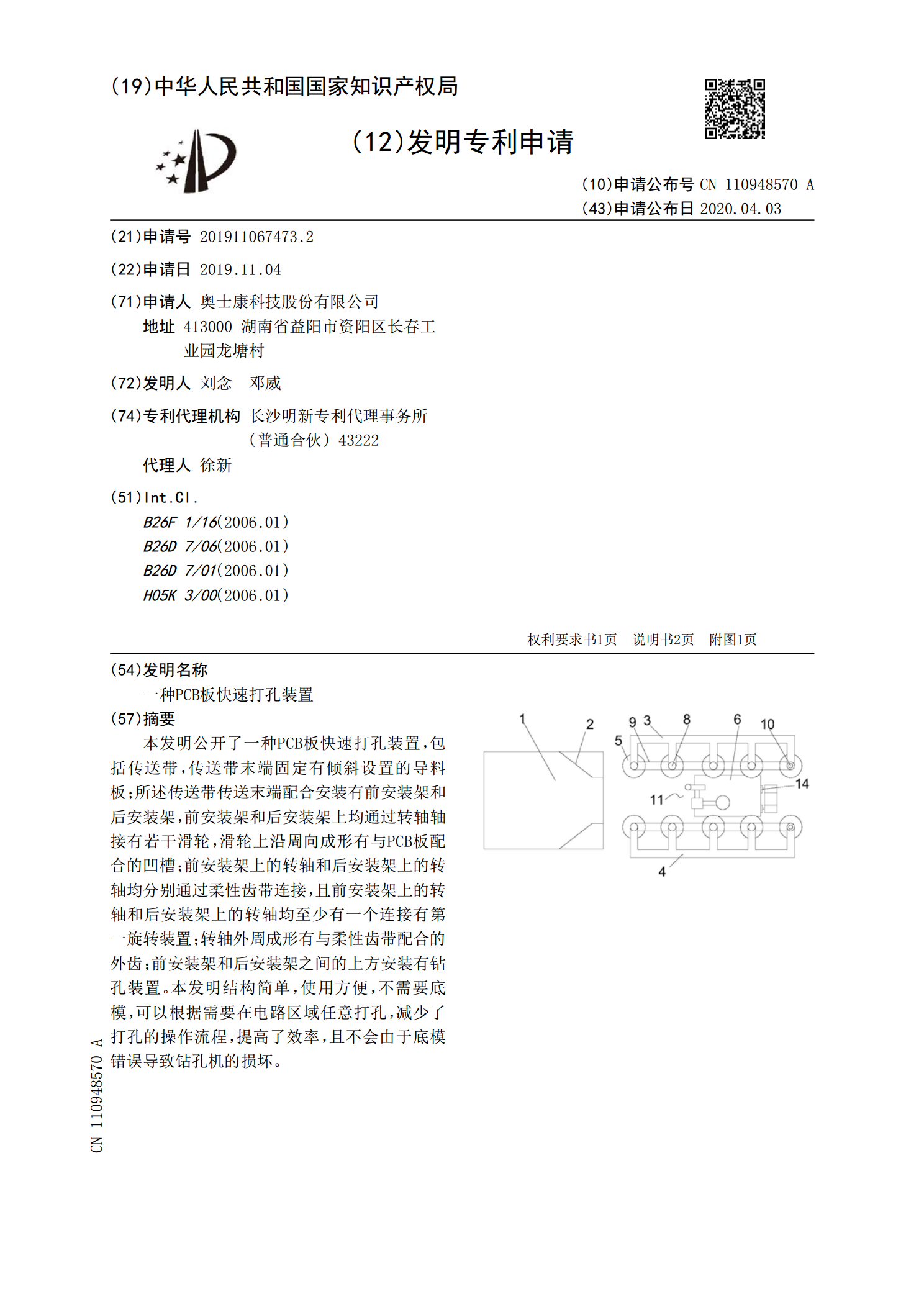
一种PCB板快速打孔装置.pdf
本发明公开了一种PCB板快速打孔装置,包括传送带,传送带末端固定有倾斜设置的导料板;所述传送带传送末端配合安装有前安装架和后安装架,前安装架和后安装架上均通过转轴轴接有若干滑轮,滑轮上沿周向成形有与PCB板配合的凹槽;前安装架上的转轴和后安装架上的转轴均分别通过柔性齿带连接,且前安装架上的转轴和后安装架上的转轴均至少有一个连接有第一旋转装置;转轴外周成形有与柔性齿带配合的外齿;前安装架和后安装架之间的上方安装有钻孔装置。本发明结构简单,使用方便,不需要底模,可以根据需要在电路区域任意打孔,减少了打孔的操作
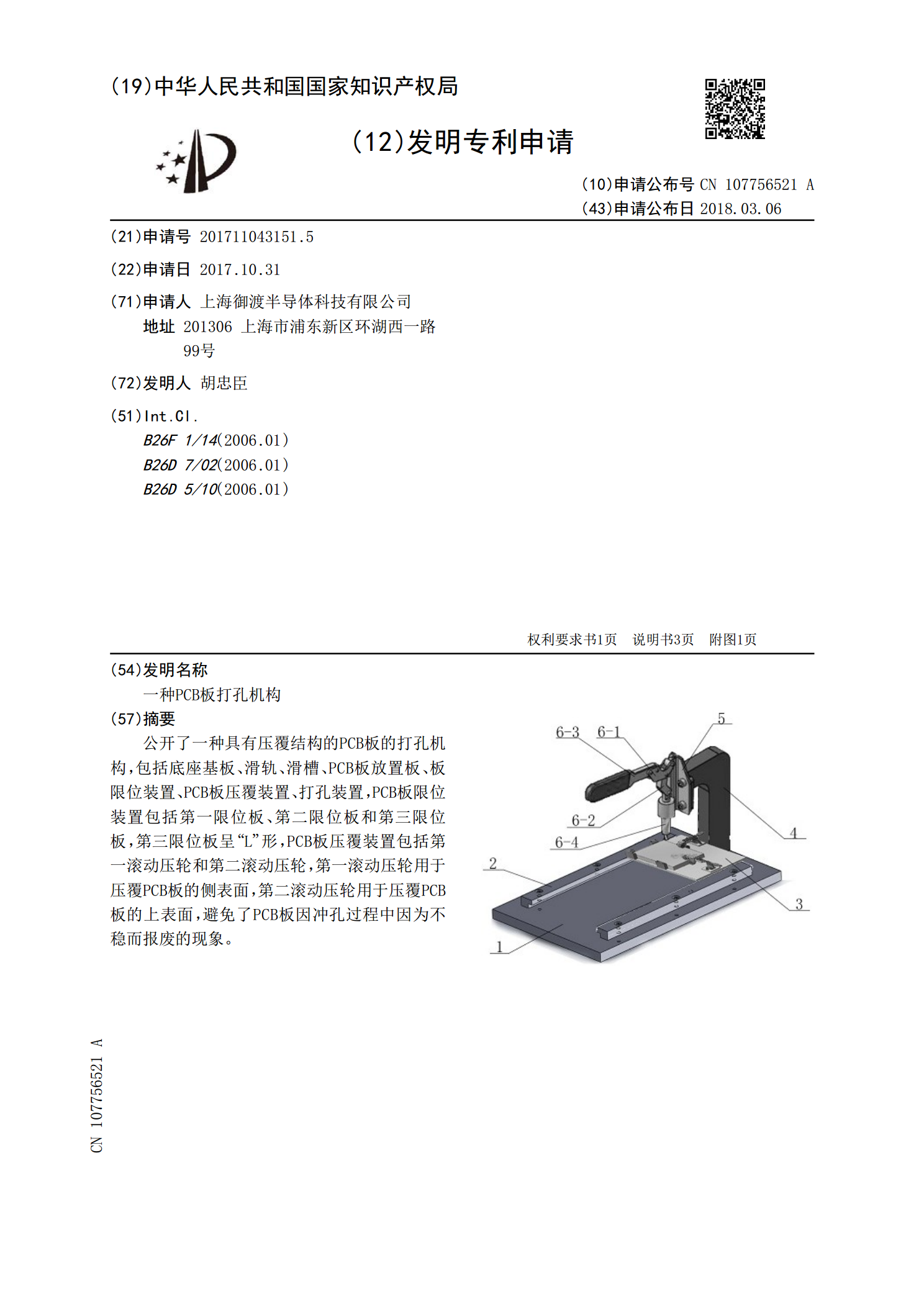
一种PCB板打孔机构.pdf
公开了一种具有压覆结构的PCB板的打孔机构,包括底座基板、滑轨、滑槽、PCB板放置板、板限位装置、PCB板压覆装置、打孔装置,PCB板限位装置包括第一限位板、第二限位板和第三限位板,第三限位板呈“L”形,PCB板压覆装置包括第一滚动压轮和第二滚动压轮,第一滚动压轮用于压覆PCB板的侧表面,第二滚动压轮用于压覆PCB板的上表面,避免了PCB板因冲孔过程中因为不稳而报废的现象。