
清洁系统、自移动清洁设备及清洁系统的控制方法.pdf

琰琬****买买


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共42页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

清洁系统、自移动清洁设备及清洁系统的控制方法.pdf
本申请实施例提供的清洁系统、自移动清洁设备及清洁系统的控制方法,其中清洁系统包括清洁基站、自移动清洁设备及位于自移动清洁设备上的清洁模块;清洁基站上设有驱动组件;自移动清洁设备包括:主机,主机内设有控制组件;清洁模块驱动模组,设于主机并与控制组件耦接,且与清洁模块可拆卸地连接;定位组件,设于清洁模块驱动模组并与控制组件耦接,用于检测清洁模块驱动模组的转动信息;控制组件根据定位组件的检测结果,控制清洁模块驱动模组带动清洁模块转动至对接位置,在对接位置,清洁模块可与清洁模块驱动模组分离,并与驱动组件进行连接,
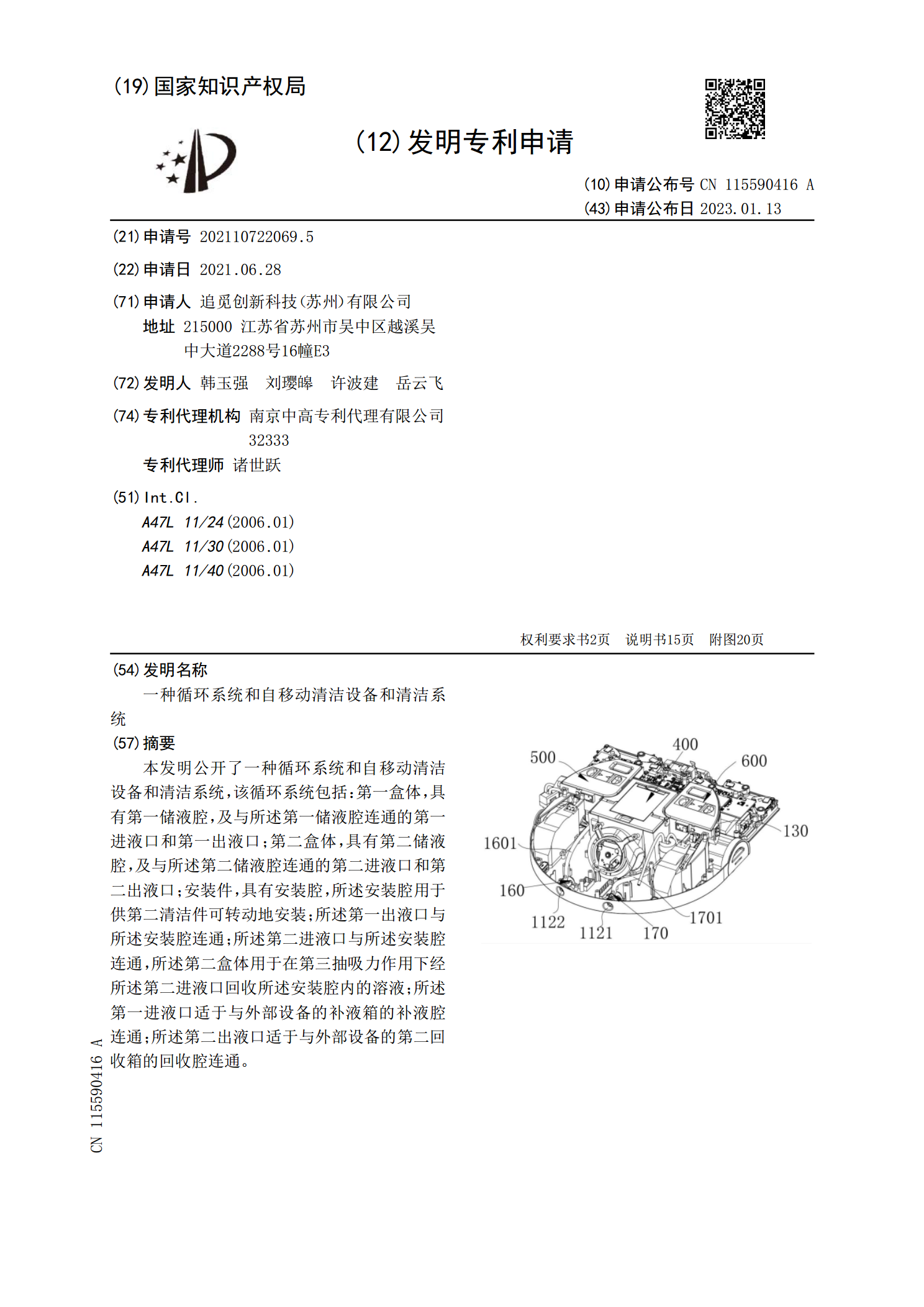
一种循环系统和自移动清洁设备和清洁系统.pdf
本发明公开了一种循环系统和自移动清洁设备和清洁系统,该循环系统包括:第一盒体,具有第一储液腔,及与所述第一储液腔连通的第一进液口和第一出液口;第二盒体,具有第二储液腔,及与所述第二储液腔连通的第二进液口和第二出液口;安装件,具有安装腔,所述安装腔用于供第二清洁件可转动地安装;所述第一出液口与所述安装腔连通;所述第二进液口与所述安装腔连通,所述第二盒体用于在第三抽吸力作用下经所述第二进液口回收所述安装腔内的溶液;所述第一进液口适于与外部设备的补液箱的补液腔连通;所述第二出液口适于与外部设备的第二回收箱的回收
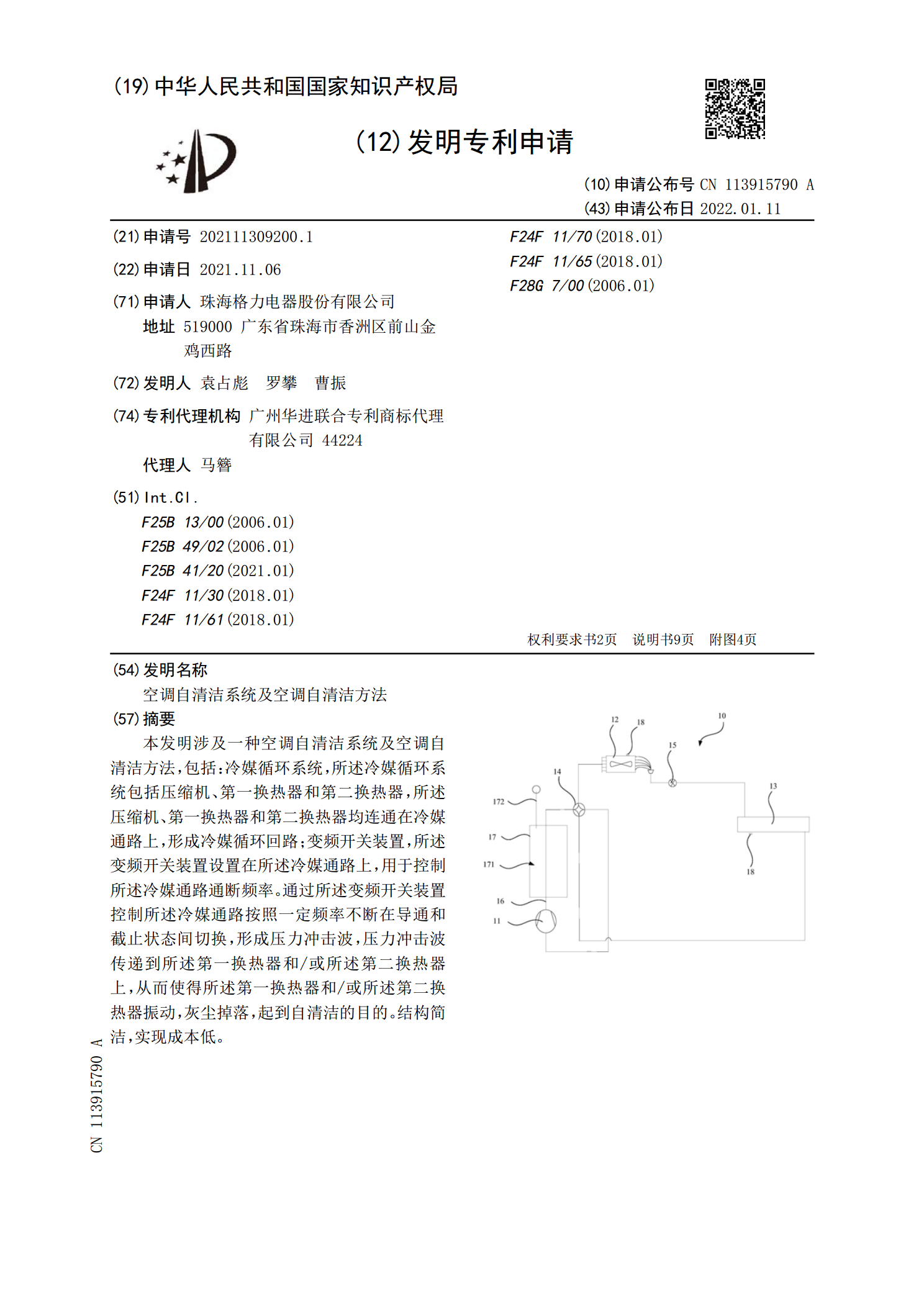
空调自清洁系统及空调自清洁方法.pdf
本发明涉及一种空调自清洁系统及空调自清洁方法,包括:冷媒循环系统,所述冷媒循环系统包括压缩机、第一换热器和第二换热器,所述压缩机、第一换热器和第二换热器均连通在冷媒通路上,形成冷媒循环回路;变频开关装置,所述变频开关装置设置在所述冷媒通路上,用于控制所述冷媒通路通断频率。通过所述变频开关装置控制所述冷媒通路按照一定频率不断在导通和截止状态间切换,形成压力冲击波,压力冲击波传递到所述第一换热器和/或所述第二换热器上,从而使得所述第一换热器和/或所述第二换热器振动,灰尘掉落,起到自清洁的目的。结构简洁,实现成

激光清洁装置、激光清洁系统及激光清洁系统使用方法.pdf
本发明提供了一种激光清洁装置、激光清洁系统及激光清洁系统使用方法。激光清洁装置通过设置激光除胶组件使用激光对胶黑进行清除,避免因路面不平、细孔、缩松和裂纹对胶黑清除效果的影响,同时避免因冲击力和化学腐蚀对路面造成损坏;而与激光除胶组件对应设置的回收组件则可有效对激光除胶组件清除胶黑产生的橡胶碎屑进行收集,并进一步进行造粒和回收,避免了二次污染的产生且可对回收后的橡胶颗粒进行再次利用,具有节能环保的优点,同时使得使用该激光清洁装置的激光清洁系统具有较高的工作效率,有效杜绝了胶黑清除过程中二次污染的产生。

一种自清洁方法和清洁系统.pdf
本申请涉及一种清洁设备的自清洁方法和清洁设备,所述方法包括:在确定清洁设备与基站对接且确定开启自清洁模式时,控制充电功能失效;控制执行第一数量次第一子自清洁模式;执行第一子自清洁模式包括:控制清洁液喷射模块喷射清洁液;控制清洁液喷射模块停止喷射清洁液,并控制充电功能有效;控制充电功能失效;控制吸力驱动模块运行;控制吸力驱动模块停止工作。如此,在自清洁过程中能够进行充电,在低电量的时候可先自清洁一段时间,避免因电量不足,长时间充电导致污垢在清洁件以及污水箱中停留时间较长,后续难以清理干净或需要更长时间来清洁