
飞翼型喷水推进的桥墩水下检测机器人及桥墩检测方法.pdf

冬易****娘子


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

飞翼型喷水推进的桥墩水下检测机器人及桥墩检测方法.pdf
本发明公开了一种飞翼型喷水推进的桥墩水下检测机器人及桥墩检测方法,包括:密闭舱式壳体、罩体、图像检测装置、主动力机构;对称设置于壳体外壁两侧中部的转向机构;设置于转向机构之上的飞翼;设置于壳体内部的浮力调节机构;设置于壳体外壁下沿的数据采集装置;设置于壳体内的电源系统;设置于壳体的综合缆;终端设备,与综合缆一端连接,用于采集、存储、分析图像检测装置与数据采集装置的回传信号。本发明能够自由地在水面和水下航行,可以简便地实现上浮和下沉,并可实现急流环境中的定点驻留,非常适用于复杂水流条件下桥墩或桩柱附近的水下
一种水下桥墩体内损伤检测方法.pdf
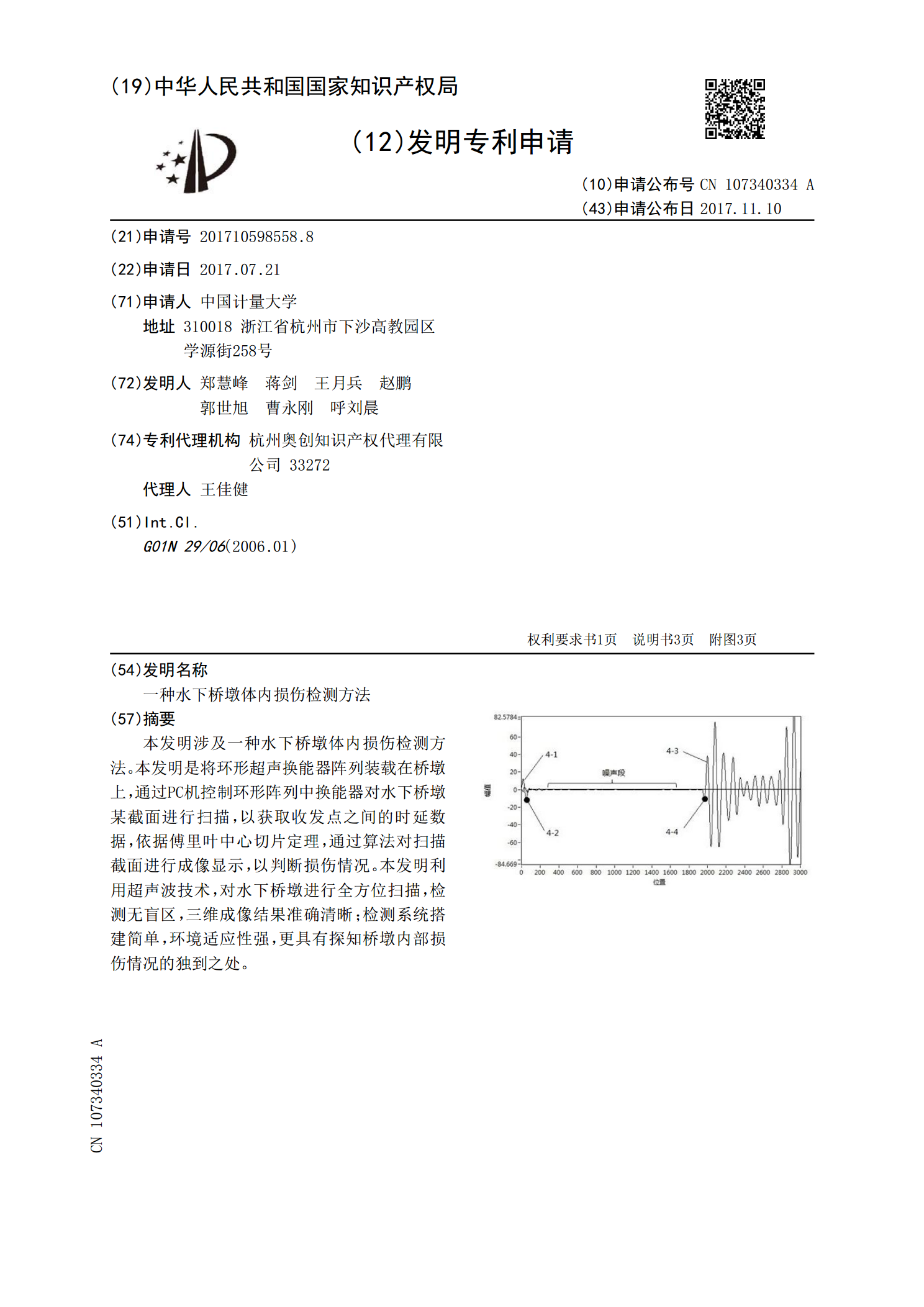
本发明涉及一种水下桥墩体内损伤检测方法。本发明是将环形超声换能器阵列装载在桥墩上,通过PC机控制环形阵列中换能器对水下桥墩某截面进行扫描,以获取收发点之间的时延数据,依据傅里叶中心切片定理,通过算法对扫描截面进行成像显示,以判断损伤情况。本发明利用超声波技术,对水下桥墩进行全方位扫描,检测无盲区,三维成像结果准确清晰;检测系统搭建简单,环境适应性强,更具有探知桥墩内部损伤情况的独到之处。

一种水下桥墩检测装置.pdf
本发明涉及一种水下桥墩检测装置,有效的解决了水下桥墩检测设备适应性差、设备成本高、工作效率低的问题;解决的技术方案包括环形的基架,基架上设有检测单元,检测单元包括一个探杆,探杆的一端铰接在基架内壁,另一端朝向基架转动方向的反方向,检测单元还包括一个倾斜固定在基架内壁上的柱塞缸,柱塞缸的倾斜方向与探杆的倾斜方向相反,柱塞缸内安装有一个柱塞杆,柱塞杆底部安装有一个压力传感器,柱塞杆与压力传感器之间安装有第三弹簧,柱塞杆的外端顶在探杆的侧壁上;本发明不受桥墩表面附着物和水体的影响,无需营设无水环境,对环境的适应
轮式旋转悬臂水下桥墩检测装置及其工作方法.pdf
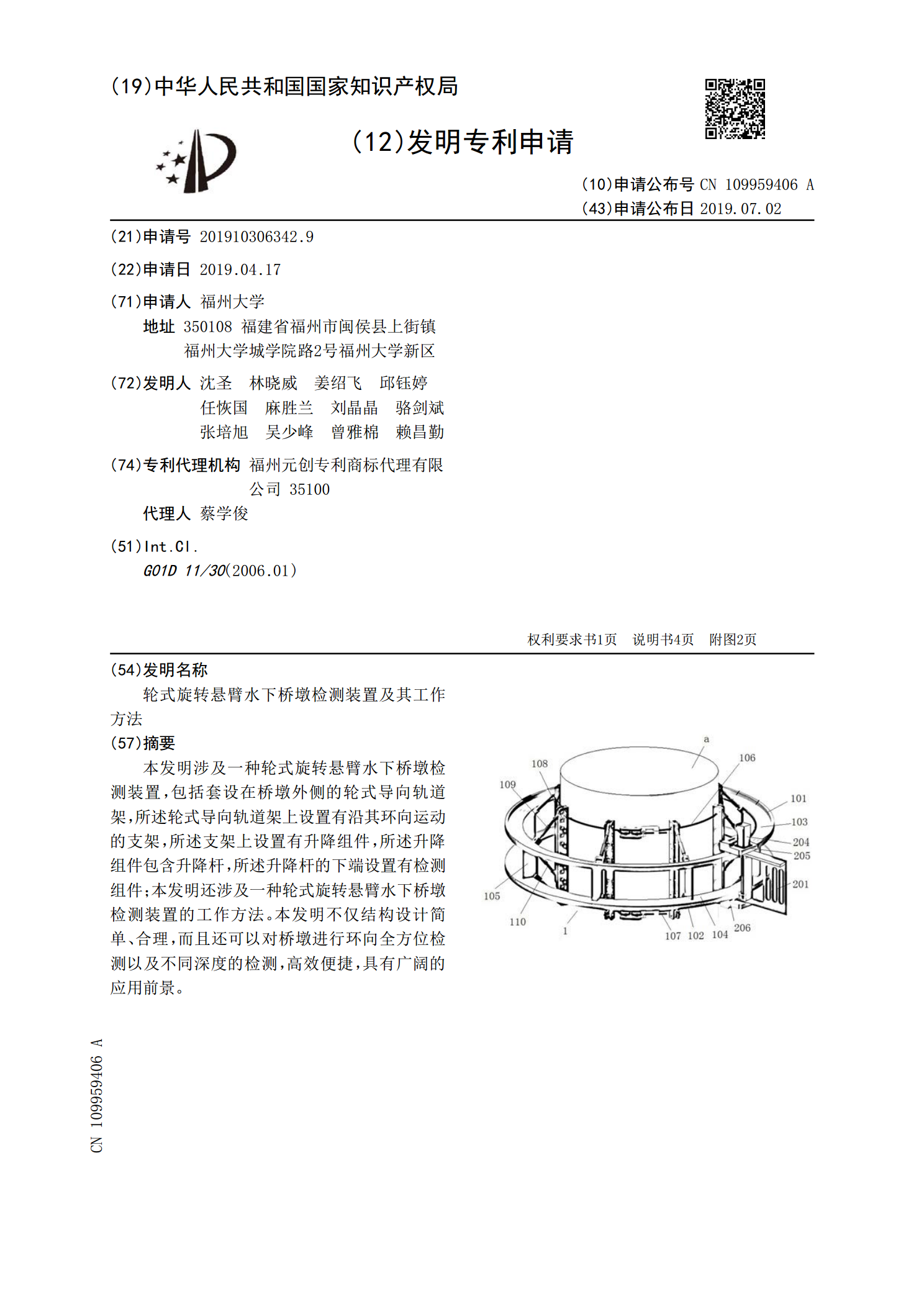
本发明涉及一种轮式旋转悬臂水下桥墩检测装置,包括套设在桥墩外侧的轮式导向轨道架,所述轮式导向轨道架上设置有沿其环向运动的支架,所述支架上设置有升降组件,所述升降组件包含升降杆,所述升降杆的下端设置有检测组件;本发明还涉及一种轮式旋转悬臂水下桥墩检测装置的工作方法。本发明不仅结构设计简单、合理,而且还可以对桥墩进行环向全方位检测以及不同深度的检测,高效便捷,具有广阔的应用前景。
一种桥墩检测机器人.pdf
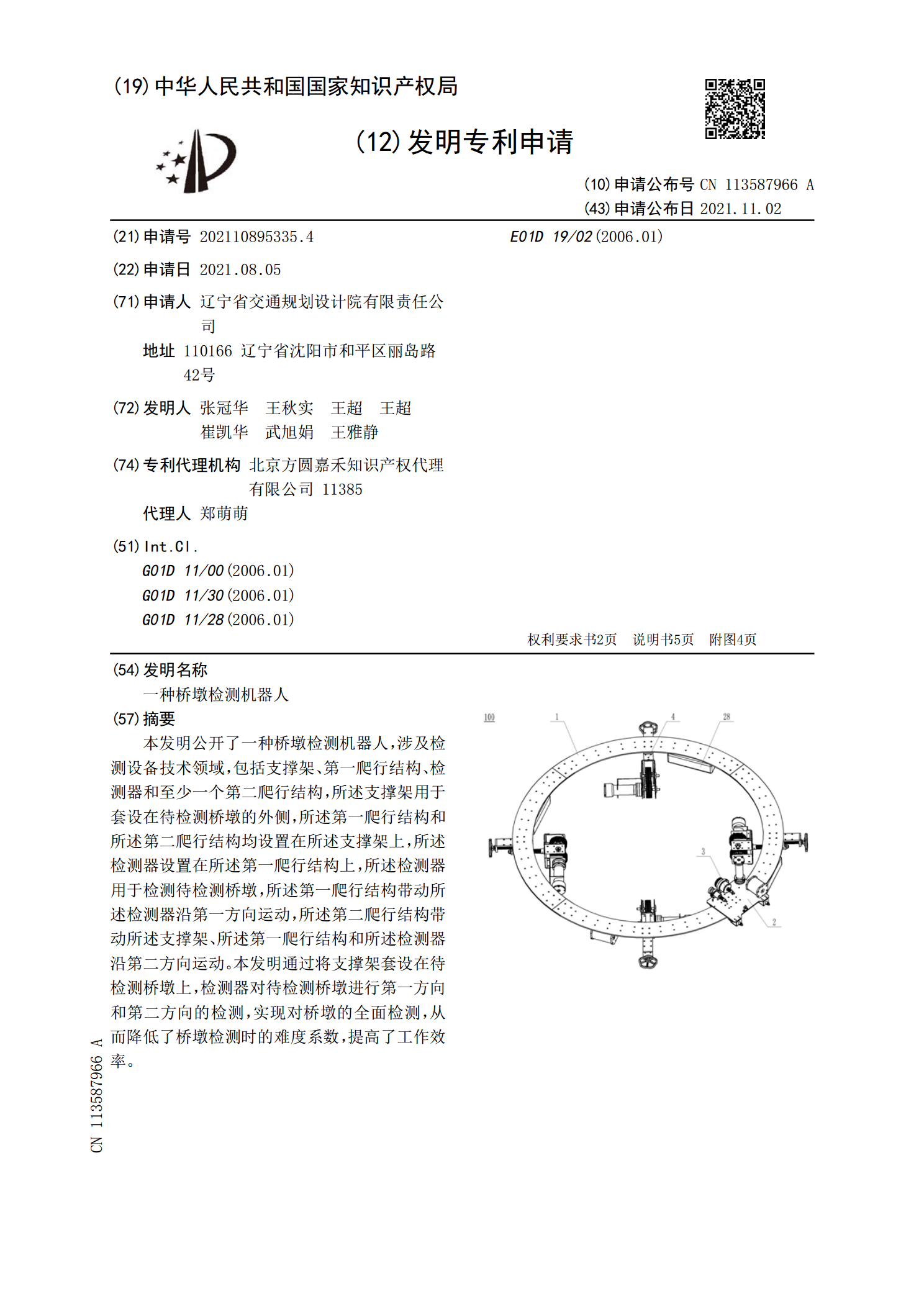
本发明公开了一种桥墩检测机器人,涉及检测设备技术领域,包括支撑架、第一爬行结构、检测器和至少一个第二爬行结构,所述支撑架用于套设在待检测桥墩的外侧,所述第一爬行结构和所述第二爬行结构均设置在所述支撑架上,所述检测器设置在所述第一爬行结构上,所述检测器用于检测待检测桥墩,所述第一爬行结构带动所述检测器沿第一方向运动,所述第二爬行结构带动所述支撑架、所述第一爬行结构和所述检测器沿第二方向运动。本发明通过将支撑架套设在待检测桥墩上,检测器对待检测桥墩进行第一方向和第二方向的检测,实现对桥墩的全面检测,从而降低了