
一种桥墩检测机器人.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种桥墩检测机器人.pdf
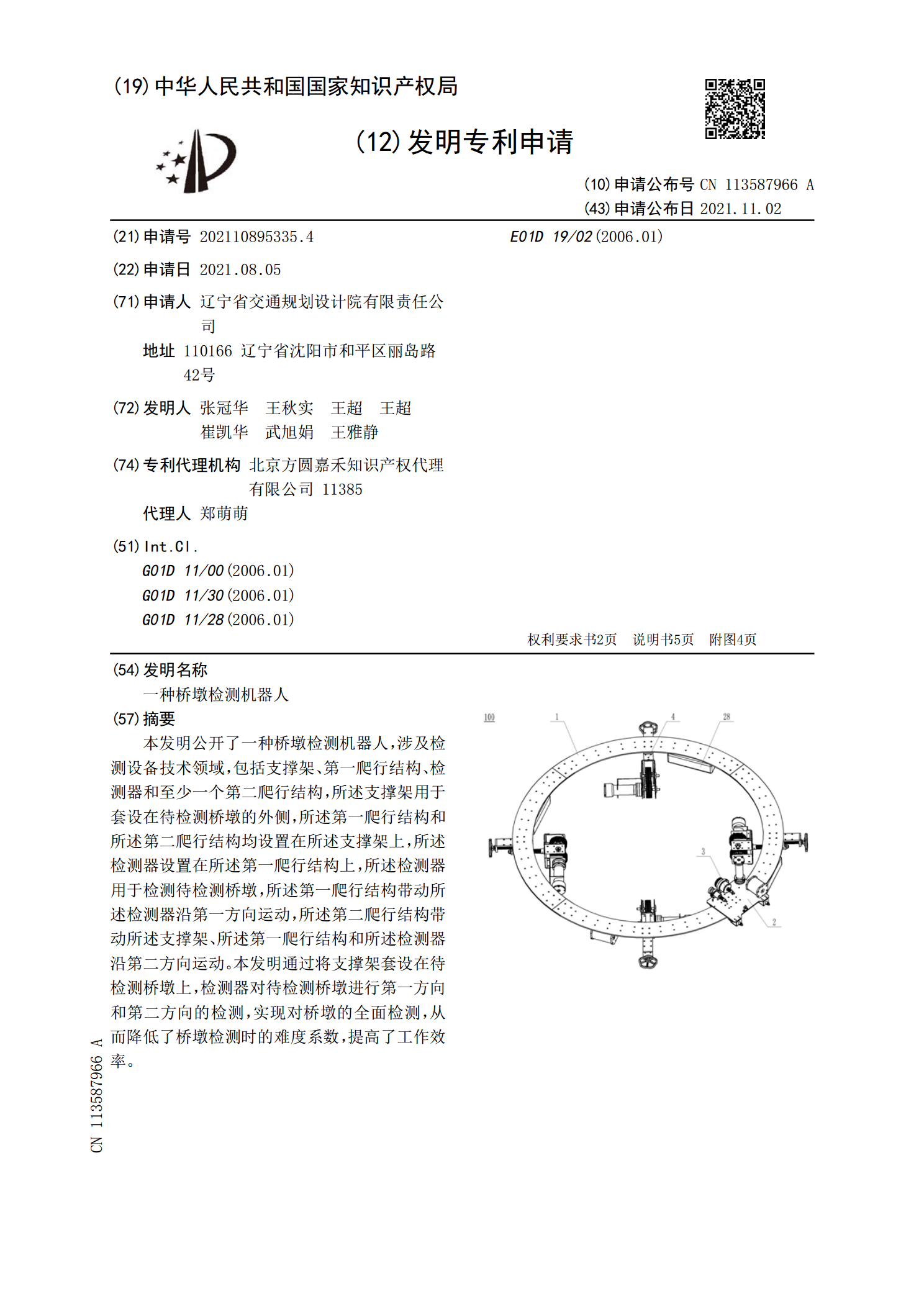
本发明公开了一种桥墩检测机器人,涉及检测设备技术领域,包括支撑架、第一爬行结构、检测器和至少一个第二爬行结构,所述支撑架用于套设在待检测桥墩的外侧,所述第一爬行结构和所述第二爬行结构均设置在所述支撑架上,所述检测器设置在所述第一爬行结构上,所述检测器用于检测待检测桥墩,所述第一爬行结构带动所述检测器沿第一方向运动,所述第二爬行结构带动所述支撑架、所述第一爬行结构和所述检测器沿第二方向运动。本发明通过将支撑架套设在待检测桥墩上,检测器对待检测桥墩进行第一方向和第二方向的检测,实现对桥墩的全面检测,从而降低了

飞翼型喷水推进的桥墩水下检测机器人及桥墩检测方法.pdf
本发明公开了一种飞翼型喷水推进的桥墩水下检测机器人及桥墩检测方法,包括:密闭舱式壳体、罩体、图像检测装置、主动力机构;对称设置于壳体外壁两侧中部的转向机构;设置于转向机构之上的飞翼;设置于壳体内部的浮力调节机构;设置于壳体外壁下沿的数据采集装置;设置于壳体内的电源系统;设置于壳体的综合缆;终端设备,与综合缆一端连接,用于采集、存储、分析图像检测装置与数据采集装置的回传信号。本发明能够自由地在水面和水下航行,可以简便地实现上浮和下沉,并可实现急流环境中的定点驻留,非常适用于复杂水流条件下桥墩或桩柱附近的水下

一种水下桥墩检测机器人的变体重构机构.pdf
本发明涉及一种水下桥墩检测机器人的变体重构机构,其创新点在于:包括多个结构相同且连为一体的水下执行单元体,每个水下执行单元体均包括五个结构相同的框架体和姿态调整单元,多个框架体之间通过姿态调整单元衔接,所述姿态调整单元包括转角电机、转角齿条、齿条座、角度传感器、导向滑条和导向滑条座,所述姿态调整单元的转角电机动作时,使转角齿条相对齿条座移动,导向滑条相对导向滑条座移动,所述水下执行单元体内侧的铰接支点发生转动,外侧可实现合拢和展开不同状态,实现水下执行单元体的变体重构。本发明能够在复杂水文地质情况下以展开

基于真空吸附的桥墩病害检测机器人.docx
基于真空吸附的桥墩病害检测机器人本文介绍了一种新型的桥墩病害检测机器人,它基于真空吸附的原理,可以快速准确地检测桥墩表面的病害。该机器人具备高效、低成本、安全等特点,在桥墩维护和修复方面有着重要的应用价值。一、研究背景桥梁是现代城市交通系统的重要组成部分,需要经常维护和检测。桥墩是桥梁的支撑基础,其结构的稳定性和安全性对于桥梁运营至关重要。然而,由于气候、交通等因素的影响,桥墩表面容易出现各种病害,如裂缝、腐蚀、疏松、掉粉等,这些病害不仅影响了桥墩的美观,更可能影响桥墩的力学性能,进而对桥梁的安全造成威胁

一种桥墩表面检测装置.pdf
本发明涉及桥梁检测设备技术领域,具体涉及一种桥墩表面检测装置;包括桥墩本体、固定板、第一气缸、延伸杆、稳定组件、支撑板、刮动组件、连接板、放置板、潜水摄像头和减震组件,通过固定板设置于桥墩本体的侧边,第一气缸设置于固定板的上方,在需要对桥墩本体的表面进行检测时,启动第一气缸,第一气缸的输出端便带动固定连接的延伸杆进行延伸,在延伸杆进行延伸时,延伸杆内侧设置的稳定组件能够辅助延伸杆进行稳定延伸,支撑板内侧的刮动组件能够将桥墩本体表面青苔进行贯穿,辅助放置板上方的潜水摄像头进行检测检测查看,十分便捷,从而提高