
一种光整机位置与压力闭环控制系统及方法.pdf

小代****回来


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种光整机位置与压力闭环控制系统及方法.pdf
一种光整机位置与压力闭环控制系统机方法,包括传动侧液压缸、传动侧压力传感器、传动侧磁尺、传动侧比例阀、传动侧闭环控制器、传动侧位置、压力给定和反馈减法器、操作侧压力、位置给定和反馈减法器、操作侧压力传感器、操作侧闭环控制器、操作侧比例阀、操作侧磁尺及操作侧液压缸,增设PID闭环控制器、位置反馈减法器、压力反馈减法器、压力给定减法器、位置给定减法器。在操作侧与传动侧液压缸按照各自给定位置或压力伸缩过程中,如两侧液压缸伸缩的速度相差较大,PID闭环控制器负责将两侧之间的位置或压力偏差控制在要求的范围内。本发明
一种压力控制闭环系统及其压力控制方法.pdf
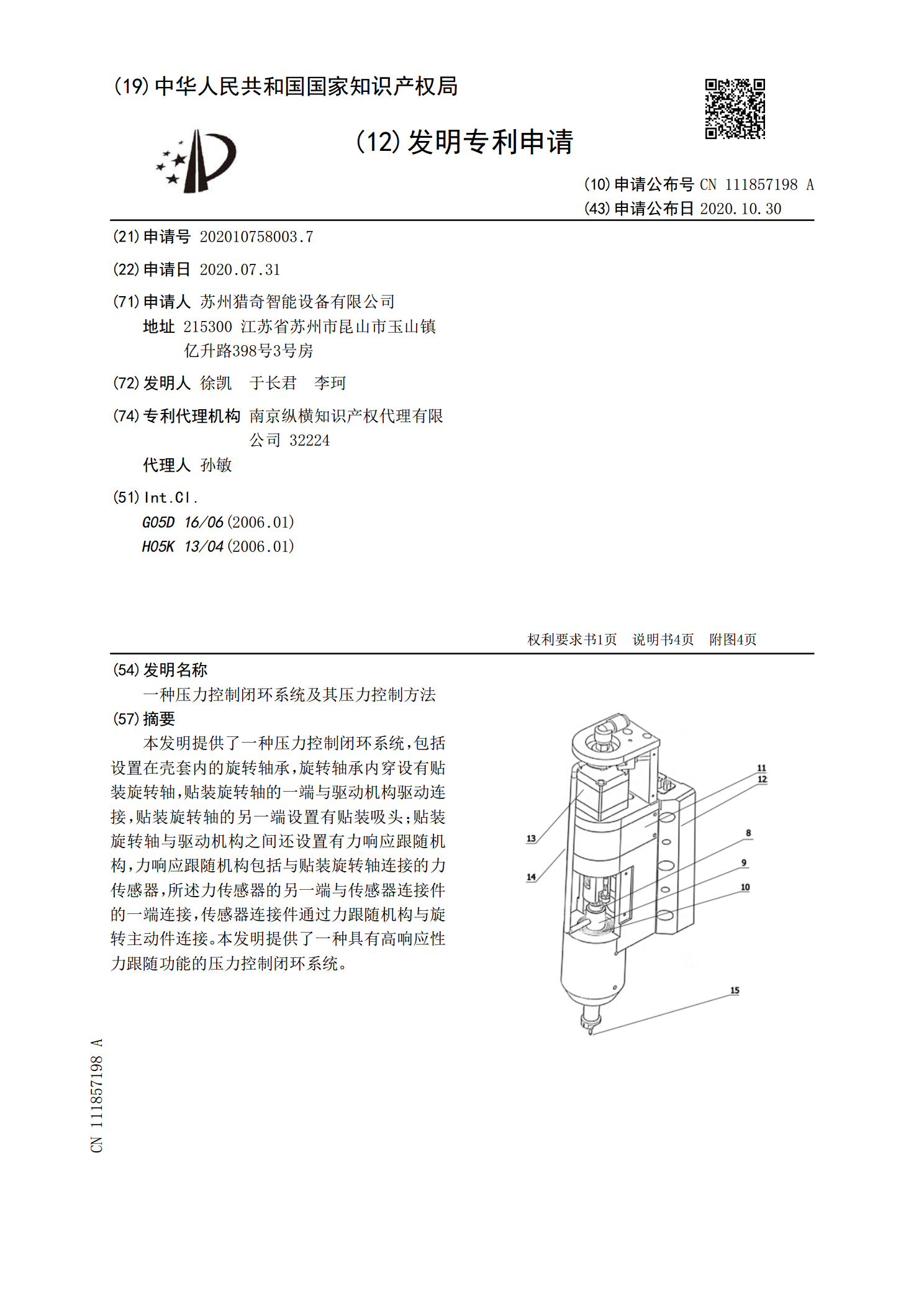
本发明提供了一种压力控制闭环系统,包括设置在壳套内的旋转轴承,旋转轴承内穿设有贴装旋转轴,贴装旋转轴的一端与驱动机构驱动连接,贴装旋转轴的另一端设置有贴装吸头;贴装旋转轴与驱动机构之间还设置有力响应跟随机构,力响应跟随机构包括与贴装旋转轴连接的力传感器,所述力传感器的另一端与传感器连接件的一端连接,传感器连接件通过力跟随机构与旋转主动件连接。本发明提供了一种具有高响应性力跟随功能的压力控制闭环系统。
光整机过程控制系统介绍.ppt
光整机过程控制系统介绍光整机简介光整机拉矫机平面布置为了获得带钢表面质量和延伸率,光整机提供必须的轧制力。光整机为四辊式,采用交流电机传动。在比较高的轧制力下,延伸率改变带钢的冶金性能(例如屈服强度)和提高带钢平直度。实际的轧制力和延伸率取决于轧辊粗糙度、产品特征和轧制模式。光整机控制的PLC柜组成及功能划分PLC的硬件组成包括s7控制柜机架带有两个CPU、(分别负责LCO和MRG),CPU458和CPU443S7CPU部分带有(包括工艺段S7CPU):机架控制(SC):机架协调由双重联动装置形成,操作模
一种平整机、光整机工作辊的制备方法.pdf
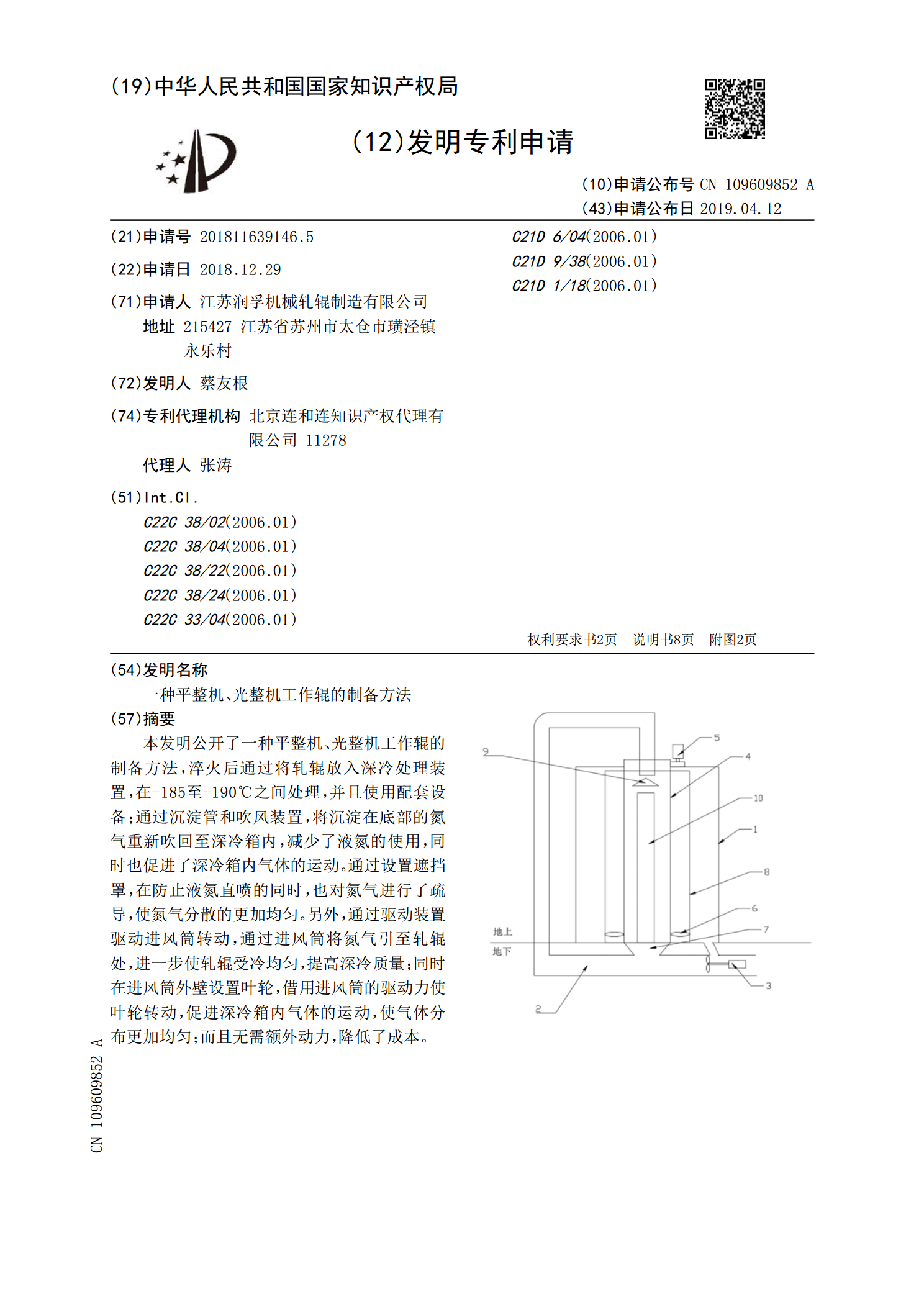
本发明公开了一种平整机、光整机工作辊的制备方法,淬火后通过将轧辊放入深冷处理装置,在‑185至‑190℃之间处理,并且使用配套设备;通过沉淀管和吹风装置,将沉淀在底部的氮气重新吹回至深冷箱内,减少了液氮的使用,同时也促进了深冷箱内气体的运动。通过设置遮挡罩,在防止液氮直喷的同时,也对氮气进行了疏导,使氮气分散的更加均匀。另外,通过驱动装置驱动进风筒转动,通过进风筒将氮气引至轧辊处,进一步使轧辊受冷均匀,提高深冷质量;同时在进风筒外壁设置叶轮,借用进风筒的驱动力使叶轮转动,促进深冷箱内气体的运动,使气体分布

一种空间光调整机构及方法.pdf
本发明提供一种空间光调整机构及方法,包括:空间光调制器本体,包括液晶板、电源模块和控制器,电源模块电性连接控制器,空间光调制器本体两侧设有U形槽;移动组件,包括固定设于U形槽内的滑动组件、连接杆组和连接块;多个独立的调节机构,包括驱动组件、固定筒和微调筒,驱动组件设于支撑板靠近移动组件一侧且与固定筒啮合连接,用于驱动固定筒转动,固定筒设于支撑板另一侧且设于微调筒内,固定筒外壁设有微调块且与微调筒螺纹连接;光学组件,光学组件一侧设有转动块且通过转动块连接微调筒。本发明通过移动移动组件实现竖直平面的移动,通过