
一种用于电驱动汽车的下坡辅助驾驶装置及控制方法.pdf

An****99


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于电驱动汽车的下坡辅助驾驶装置及控制方法.pdf
一种用于电驱动汽车的下坡辅助驾驶装置和控制方法,包括开关模块,目标速度模块,速度控制模块以及制动力分配模块,开关模块根据驾驶人的操作和车辆的行驶状况开启或关闭下坡辅助驾驶装置;目标速度模块用于记录当开关模块开启下坡辅助驾驶装置时的瞬时速度,作为目标速度;速度控制模块用于根据当前实时速度和目标速度的差值计算保持目标速度所需要的目标制动扭矩;制动力分配模块用于控制驱动电机的动力回收,以提供与目标制动扭矩相同的制动扭矩。利用驱动电机的动能回收功能产生下滑过程中的制动扭矩,减少通过摩擦制动被耗散的能量,并且驾驶者
一种汽车上下坡辅助装置.pdf
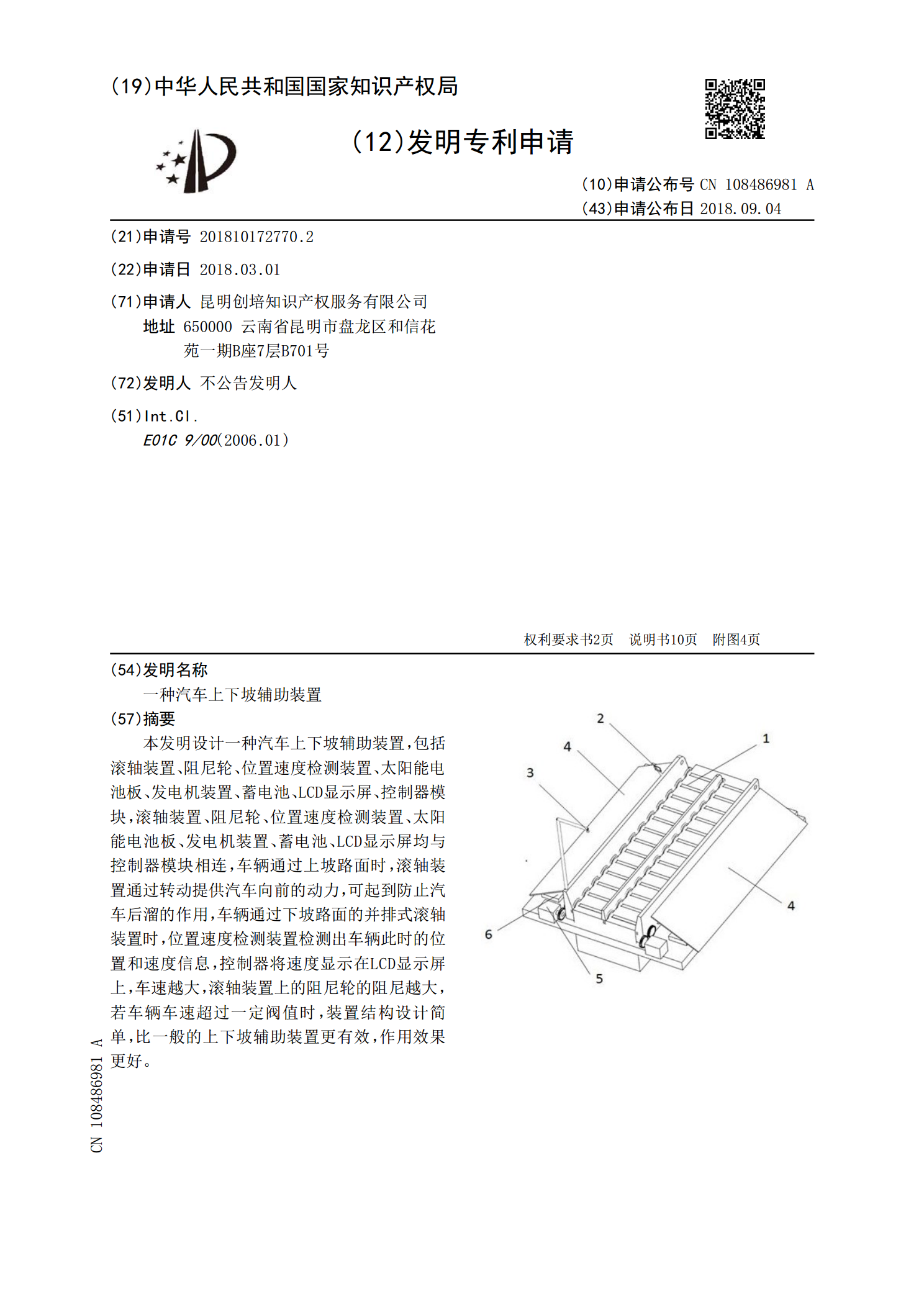
本发明设计一种汽车上下坡辅助装置,包括滚轴装置、阻尼轮、位置速度检测装置、太阳能电池板、发电机装置、蓄电池、LCD显示屏、控制器模块,滚轴装置、阻尼轮、位置速度检测装置、太阳能电池板、发电机装置、蓄电池、LCD显示屏均与控制器模块相连,车辆通过上坡路面时,滚轴装置通过转动提供汽车向前的动力,可起到防止汽车后溜的作用,车辆通过下坡路面的并排式滚轴装置时,位置速度检测装置检测出车辆此时的位置和速度信息,控制器将速度显示在LCD显示屏上,车速越大,滚轴装置上的阻尼轮的阻尼越大,若车辆车速超过一定阀值时,装置结构

一种应用于汽车电驱动桥的驱动防滑控制方法.pdf
本发明提出一种应用于汽车电驱动桥的驱动防滑控制方法,旨在解决现有技术中存在的路面适应性差、控制算法单一、依赖整车参数过多、控制鲁棒性差等缺点,属于汽车控制系统。本方法根据车轮实时滑转率和两侧车轮实时滑转率差值判断车辆处于对开路面或均一低附着系数路面;采用制动力逻辑门限控制对处于对开路面的滑转车轮进行制动干预;采用初始制动方式进一步判断均一低附着系数路面下滑转车轮所处路面类型,并采用滑模变结构控制调整滑转车轮驱动转矩。本发明的优点是能够以标准路面数据为基础,实时判别路面类型,采用不同控制算法控制车轮滑转率在

辅助驾驶装置、方法及汽车.pdf
本发明实施例公开了一种辅助驾驶装置、方法及汽车,其属于车辆技术领域,至少能够解决现有技术中的汽车由于无法获取周围的路况信息而无法做出正确的变更驾驶操作,进而引发交通事故的技术问题。该辅助驾驶装置包括:通信模块,用于与邻车建立无线通信连接,通过无线通信连接接收邻车发送的邻车车辆信息;解析模块,用于对邻车车辆信息进行解析,获取其中包含的邻车的驾驶操作信息和/或行车路况信息;提示模块,用于根据邻车的驾驶操作信息和/或行车路况信息,生成用于辅助驾驶员驾驶的辅助提示信息。

混合动力汽车下坡辅助控制方法.docx
混合动力汽车下坡辅助控制方法随着车辆技术的发展,混合动力汽车已经成为了汽车市场上的主流车型。与传统的汽油车相比,混合动力汽车不仅在燃油经济性上有了显著的提升,而且在智能化控制方面也取得了一定的进展。本文将重点讨论混合动力汽车的下坡辅助控制方法。下坡辅助控制是一种能够帮助驾驶员更加轻松、轻松地下坡行驶的系统。在下坡行驶时,由于重力和惯性的作用,如果没有采取有效的措施,汽车可能会加速下滑,甚至失去控制。因此,下坡辅助控制就显得非常重要了。在混合动力汽车中,下坡辅助控制通常采用动力分配控制的方法。具体来说,就是