
一种解决目标跨距离单元走动的多普勒测量方法.pdf

小琛****82

1/9
2/9

3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种解决目标跨距离单元走动的多普勒测量方法.pdf
本发明公开了一种解决目标跨距离单元走动的多普勒测量方法,本发明为全相圆阵脉冲多普勒雷达的测速算法,可以精确地测出不同速度范围的目标速度,并可以解决目标跨距离单元走动的方法。本发明使用同时多阶数MTD滤波器,解决了不同速度目标的跨距离单元走动引起的信噪比损失问题,使用了交叉对比同时多阶数MTD滤波器,实现了对目标速度的精确测量;本发明由于不同滤波器组积累时间不一样,所以可以减小由于目标运动导致的跨距离单元造成的信噪比损失,对于部分速度范围可以达到没有信噪比损失的情况,可以提高小目标被检测到概率。使用不同阶数
用于解决距离多普勒图中距离走动效应的滤波处理.pdf
一种雷达系统和处理由雷达系统的接收部分获得的、由发射一个或多个信号产生的一个或多个返回信号的方法包括:发射部分,用于发射所述一个或多个信号;以及接收部分,用于接收由目标对所述一个或多个信号的反射产生的所述一个或多个返回信号。该系统还包括处理器,用于使用两级快速傅立叶变换(FFT)来处理所述一个或多个返回信号,以获得指示成组的距离值和成组的多普勒值中的每一个处的能级的距离多普勒图,使用根据对成组的距离值中的多个的估计来确定大小的核对距离多普勒图进行滤波,并且基于滤波的结果来执行目标检测,其中在所述成组的距离
一种车载多普勒激光雷达距离测量方法.pdf
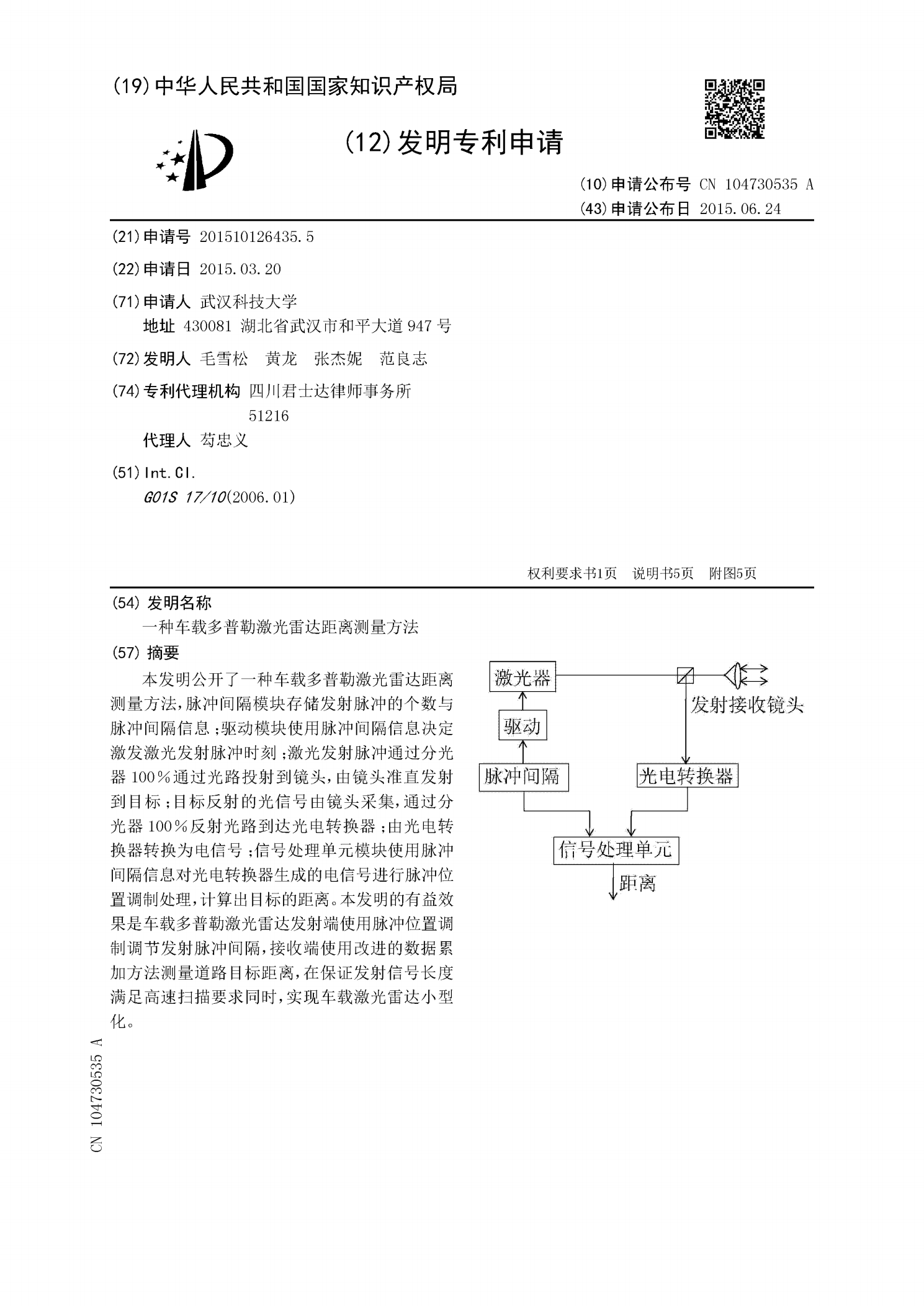
本发明公开了一种车载多普勒激光雷达距离测量方法,脉冲间隔模块存储发射脉冲的个数与脉冲间隔信息;驱动模块使用脉冲间隔信息决定激发激光发射脉冲时刻;激光发射脉冲通过分光器100%通过光路投射到镜头,由镜头准直发射到目标;目标反射的光信号由镜头采集,通过分光器100%反射光路到达光电转换器;由光电转换器转换为电信号;信号处理单元模块使用脉冲间隔信息对光电转换器生成的电信号进行脉冲位置调制处理,计算出目标的距离。本发明的有益效果是车载多普勒激光雷达发射端使用脉冲位置调制调节发射脉冲间隔,接收端使用改进的数据累加方

一种距离走动的分段补偿方法.docx
一种距离走动的分段补偿方法距离走动的分段补偿方法摘要:距离走动是人们生活中不可避免的一部分,然而长时间的距离走动可能会引起腿部疲劳和不适。因此,开发出一种距离走动的分段补偿方法,能够减轻腿部疲劳,提高行走的效率和舒适性,具有重要的实际应用意义。本论文将介绍距离走动的分段补偿方法的原理、实施步骤和优缺点,旨在为人们提供更好的行走体验。关键词:距离走动;分段补偿;腿部疲劳;行走效率;舒适性一、引言距离走动是人们日常生活中不可或缺的一部分。长时间的行走可能会引起腿部疲劳和不适,影响行走的效率和舒适性。为了解决这

一种多普勒频偏测量方法.pdf
本发明属于水声信号处理领域,具体涉及一种多普勒频偏测量方法。本发明属于水声信号处理领域。涉及一种水声信道中的多普勒频偏测量方法。本发明中的多普勒频偏测量方法是在传统的FFT运算基础上进行的。先对接收的信号进行FFT运算,得到的结果仅为频率的粗略估计值。为进一步提高估计精度,在粗略估计值周围进行插值迭代运算,迭代两次即可得到频率的精细估计值。这样,将频率估计结果与原信号频率相减便可得到高精度的多普勒频偏测量值。本发明的优点在于估计性能受多途干扰影响小,能在低信噪比下进行多普勒频偏估计;频率估计精度高,理论上