
一种车载多普勒激光雷达距离测量方法.pdf

运升****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载多普勒激光雷达距离测量方法.pdf
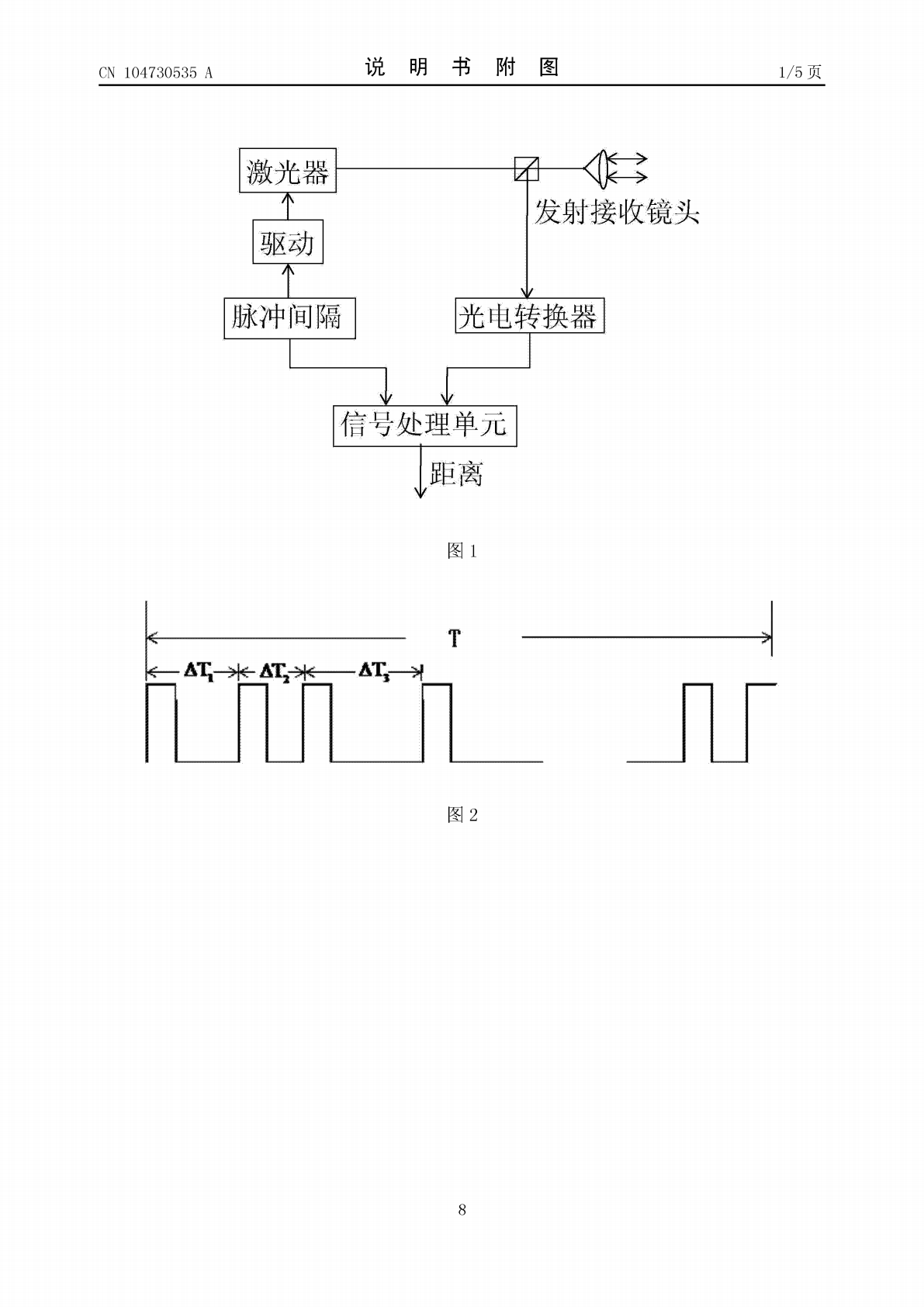
本发明公开了一种车载多普勒激光雷达距离测量方法,脉冲间隔模块存储发射脉冲的个数与脉冲间隔信息;驱动模块使用脉冲间隔信息决定激发激光发射脉冲时刻;激光发射脉冲通过分光器100%通过光路投射到镜头,由镜头准直发射到目标;目标反射的光信号由镜头采集,通过分光器100%反射光路到达光电转换器;由光电转换器转换为电信号;信号处理单元模块使用脉冲间隔信息对光电转换器生成的电信号进行脉冲位置调制处理,计算出目标的距离。本发明的有益效果是车载多普勒激光雷达发射端使用脉冲位置调制调节发射脉冲间隔,接收端使用改进的数据累加方

车载多普勒激光雷达距离速度同步测量方法的研究的开题报告.docx
车载多普勒激光雷达距离速度同步测量方法的研究的开题报告一、选题背景和研究意义随着无人驾驶技术的发展,车载激光雷达作为无人驾驶的核心传感器,不断地得到广泛的应用。而多普勒激光雷达作为激光雷达的一种,可以通过测量物体相对于车辆的速度和距离信息,为无人驾驶车辆提供更为精准的环境感知信息。在多普勒激光雷达的应用过程中,距离和速度是非常重要的参数,精确的测量可以显著提高车辆的安全性和稳定性。然而,在车载多普勒激光雷达测量中,距离和速度通常是由不同的测量系统得到的,因此在使用中也容易出现两者的非同步问题。因此,研究车

车载多普勒激光雷达距离速度同步测量方法的研究的任务书.docx
车载多普勒激光雷达距离速度同步测量方法的研究的任务书任务书一、任务背景随着智能汽车、自动驾驶技术的发展和普及,车载雷达技术逐渐成为研究的热点。雷达传感器作为智能驾驶系统中最重要的感知设备,已经广泛应用于距离测量、目标探测、速度测量、定位和地图绘制等方面。多普勒激光雷达具有高分辨率、高精度和抗干扰能力强的特点,被广泛应用于智能交通、军事防卫和民用领域。多普勒雷达测量目标的速度和距离需要对接收信号进行时域和频域分析,但由于目标速度较快、目标数量多,导致实时计算量大、复杂度高、处理效率低。如何提高多普勒雷达的测
准双多普勒激光雷达装置及其测量方法.pdf
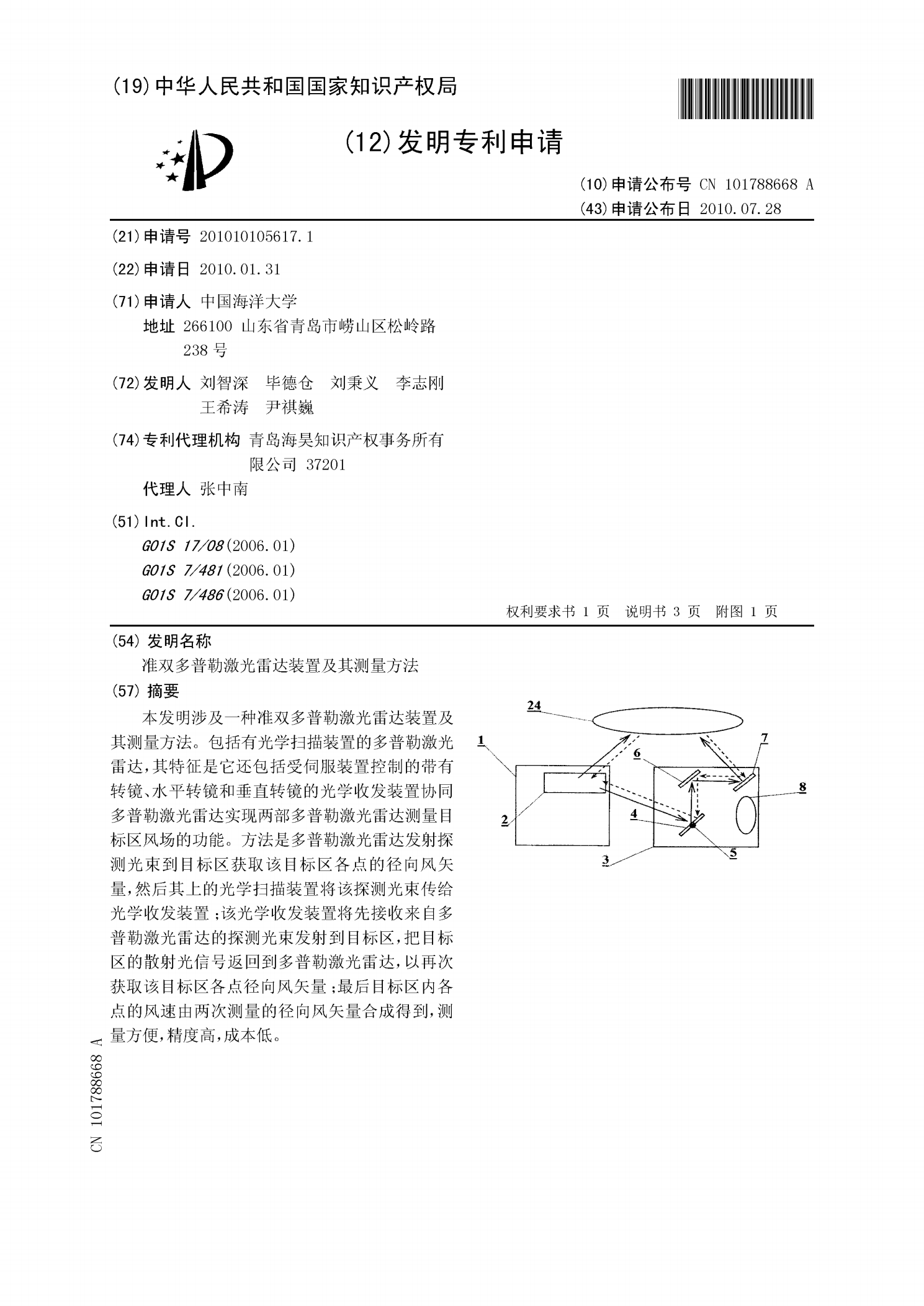
本发明涉及一种准双多普勒激光雷达装置及其测量方法。包括有光学扫描装置的多普勒激光雷达,其特征是它还包括受伺服装置控制的带有转镜、水平转镜和垂直转镜的光学收发装置协同多普勒激光雷达实现两部多普勒激光雷达测量目标区风场的功能。方法是多普勒激光雷达发射探测光束到目标区获取该目标区各点的径向风矢量,然后其上的光学扫描装置将该探测光束传给光学收发装置;该光学收发装置将先接收来自多普勒激光雷达的探测光束发射到目标区,把目标区的散射光信号返回到多普勒激光雷达,以再次获取该目标区各点径向风矢量;最后目标区内各点的风速由两

基于伪随机码调制的车载激光雷达距离速度同步测量方法的开题报告.docx
基于伪随机码调制的车载激光雷达距离速度同步测量方法的开题报告一、研究背景车载激光雷达是一种新型的测距系统,具有精度高、反应速度快等优点,在自动驾驶、交通监测等领域具有广泛应用前景。但是,要保证车载激光雷达测距系统的准确性,需要解决距离和速度的同步测量问题。传统的车载激光雷达距离速度测量方法是通过大气反射和接收延迟时间的变化来计算距离和速度,这种方法存在多个误差来源,如大气湍流、地形变化等,导致其难以满足高精度测量需求。因此,需要一种新的距离速度测量方法来克服这些误差影响,提高车载激光雷达的测量精度和可靠性