
用于向铆钉机供给铆钉元件的方法.pdf

一吃****新冬


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于向铆钉机供给铆钉元件的方法.pdf
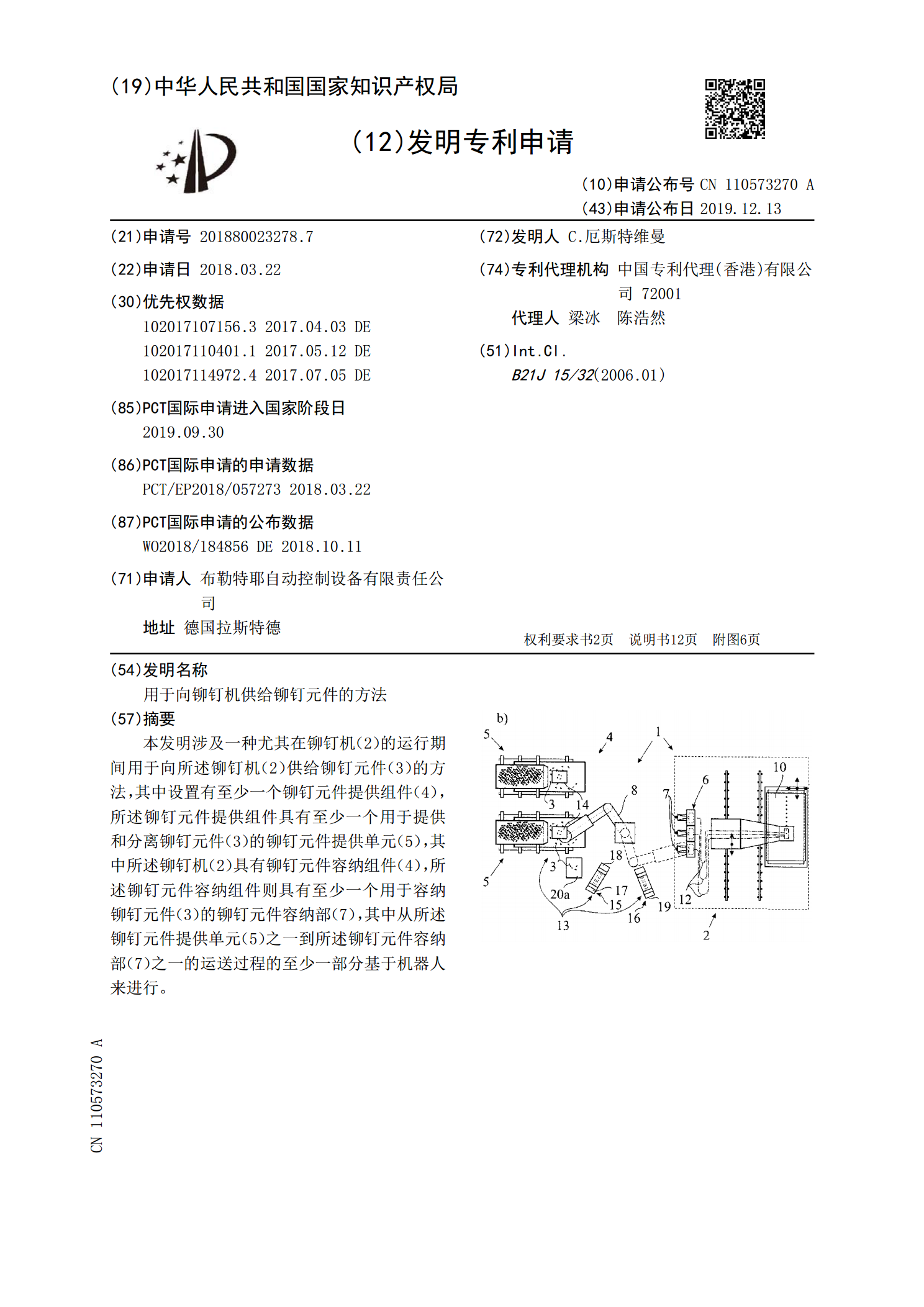
本发明涉及一种尤其在铆钉机(2)的运行期间用于向所述铆钉机(2)供给铆钉元件(3)的方法,其中设置有至少一个铆钉元件提供组件(4),所述铆钉元件提供组件具有至少一个用于提供和分离铆钉元件(3)的铆钉元件提供单元(5),其中所述铆钉机(2)具有铆钉元件容纳组件(4),所述铆钉元件容纳组件则具有至少一个用于容纳铆钉元件(3)的铆钉元件容纳部(7),其中从所述铆钉元件提供单元(5)之一到所述铆钉元件容纳部(7)之一的运送过程的至少一部分基于机器人来进行。

铆钉元件供给单元.pdf
本发明涉及一种用于提供铆钉元件(5)的铆钉元件供给单元,其中,铆钉元件供给单元(3)具有铆钉元件提供单元(6)和操纵单元(7),其中,铆钉元件提供单元(6)为了输送铆钉元件(5)具有螺旋输送器(8),所述螺旋输送器带有纵向轴线(L)和螺旋部(9),所述螺旋部围绕纵向轴线(L)延伸,其中,纵向轴线(2)相对于重力方向(G)倾斜,其中,铆钉元件提供单元(6)具有抓取区域(11),螺旋输送器(8)将铆钉元件(5)供应给该抓取区域并且操纵单元(7)从抓取区域抓取铆钉元件(5)以用于运输至铆钉元件接纳部(12)。

用于给铆钉盒填充铆钉元件的方法.pdf
本发明涉及一种用于借助铆钉装载站(1)给铆钉盒(2)填充铆钉元件(3)的方法,所述铆钉装载站具有用于提供铆钉元件(3)的铆钉提供单元(4)和用于容纳铆钉盒(2)的铆钉盒容纳件(5),其中,铆钉元件(3)从铆钉提供单元(4)输送至容纳在铆钉盒容纳件(5)中的铆钉盒(2),并且在其中定向地容纳。本发明提出,铆钉装载站(1)在输送至铆钉盒(2)之前检测铆钉元件(3)的预先确定的对于钻孔过程和/或铆接过程来说重要的特性。
用于从铆接设备移除盲铆钉元件的方法.pdf
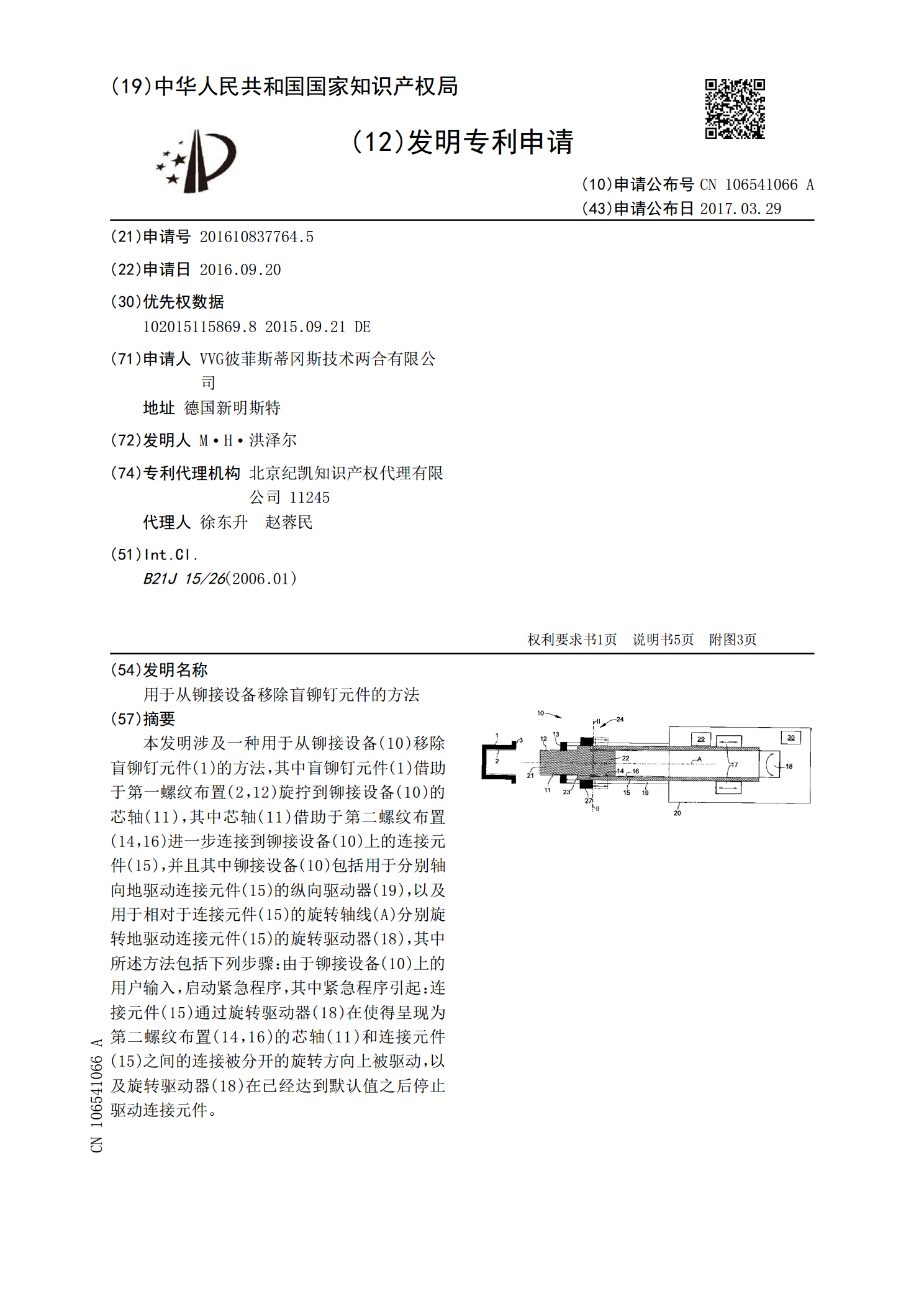
本发明涉及一种用于从铆接设备(10)移除盲铆钉元件(1)的方法,其中盲铆钉元件(1)借助于第一螺纹布置(2,12)旋拧到铆接设备(10)的芯轴(11),其中芯轴(11)借助于第二螺纹布置(14,16)进一步连接到铆接设备(10)上的连接元件(15),并且其中铆接设备(10)包括用于分别轴向地驱动连接元件(15)的纵向驱动器(19),以及用于相对于连接元件(15)的旋转轴线(A)分别旋转地驱动连接元件(15)的旋转驱动器(18),其中所述方法包括下列步骤:由于铆接设备(10)上的用户输入,启动紧急程序,其中
后法兰铆钉机.pdf
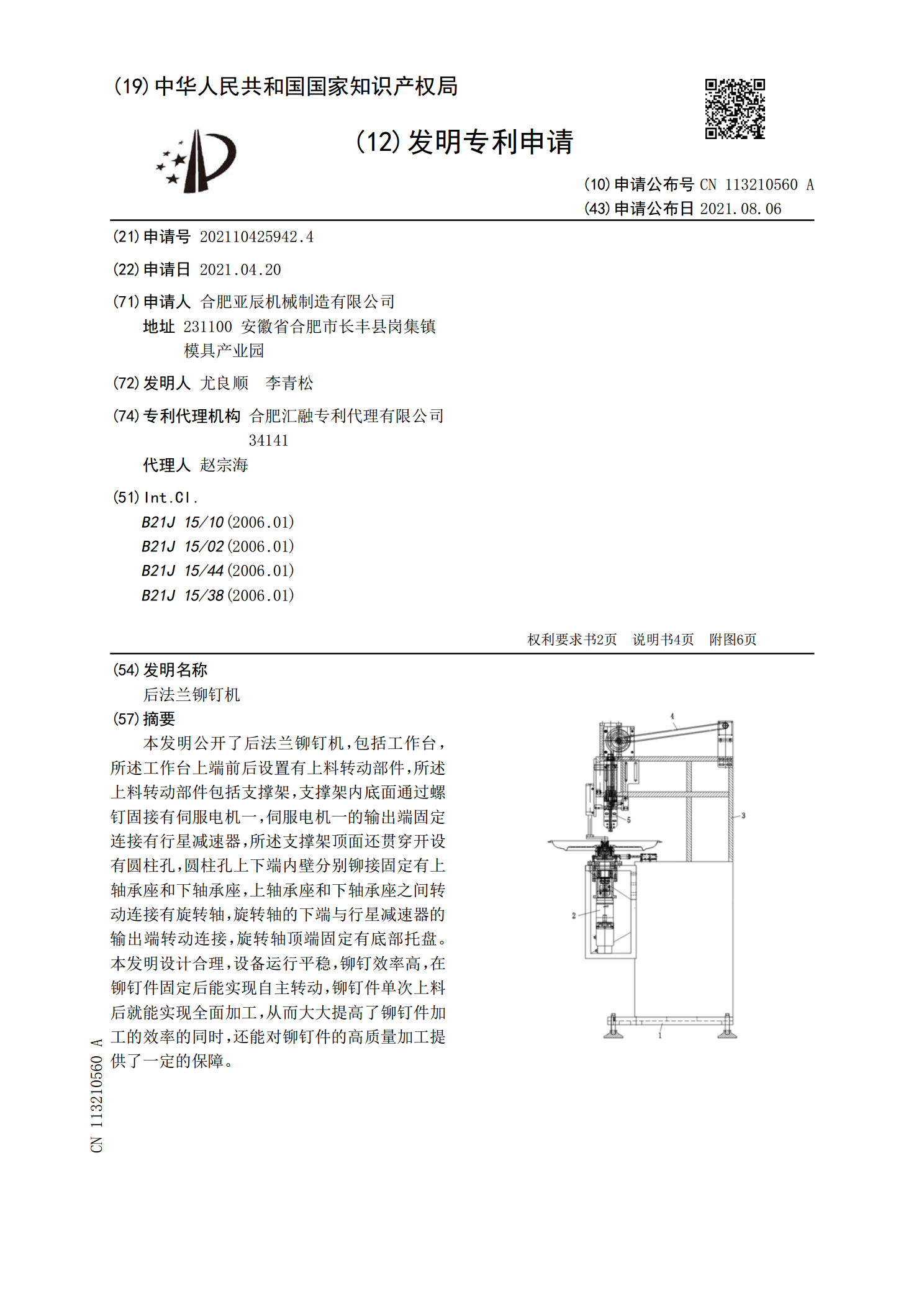
本发明公开了后法兰铆钉机,包括工作台,所述工作台上端前后设置有上料转动部件,所述上料转动部件包括支撑架,支撑架内底面通过螺钉固接有伺服电机一,伺服电机一的输出端固定连接有行星减速器,所述支撑架顶面还贯穿开设有圆柱孔,圆柱孔上下端内壁分别铆接固定有上轴承座和下轴承座,上轴承座和下轴承座之间转动连接有旋转轴,旋转轴的下端与行星减速器的输出端转动连接,旋转轴顶端固定有底部托盘。本发明设计合理,设备运行平稳,铆钉效率高,在铆钉件固定后能实现自主转动,铆钉件单次上料后就能实现全面加工,从而大大提高了铆钉件加工的效率