
一种基于主瓣幅度响应控制的机载频率分集阵列雷达快速运动目标检测方法.pdf

Th****s3


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于主瓣幅度响应控制的机载频率分集阵列雷达快速运动目标检测方法.pdf
本发明公开了一种基于主瓣幅度响应控制的机载频率分集阵列雷达快速运动目标检测方法,机载频率分集阵列雷达目标和杂波数据采集;快速运动目标角度多普勒散焦分析;基于主瓣幅度响应约束的稳健FDA空时自适应处理方法;杂波抑制和快速运动目标检测。本发明具有基于幅度响应约束技术,在目标感兴趣的空时域内设计了主瓣空时响应约束来解决目标空时导向矢量严重失配的问题;在快速运动目标角度‑多普勒散焦区域设计了非聚焦空时响应约束,并建立了包含杂波协方差矩阵非理想因素的稳健FDA‑STAP优化问题,得到了稳健FDA‑STAP权矢量,获

基于时域频率分集的MIMO雷达慢速目标检测方法.pdf
本发明涉及机载雷达技术领域,具体涉及基于时域频率分集的MIMO雷达慢速目标检测方法,包括如下步骤:S1、建立基于时域频率分集的MIMO雷达信号模型;S2、在S1的基础上分析杂波的空时特性,得出多普勒频率所具有的距离依赖性;S3、利用距离的先验信息,并基于杂波多普勒域进行距离依赖性补偿;S4、采用补偿后的数据作为样本,来估计待检测单元的杂波协方差矩阵;S5、利用估计得到的待检测单元的杂波协方差矩阵和目标导向矢量计算STAP权矢量,以对慢速目标进行检测。
基于频率分集阵列点对点无线信号通信方法.pdf
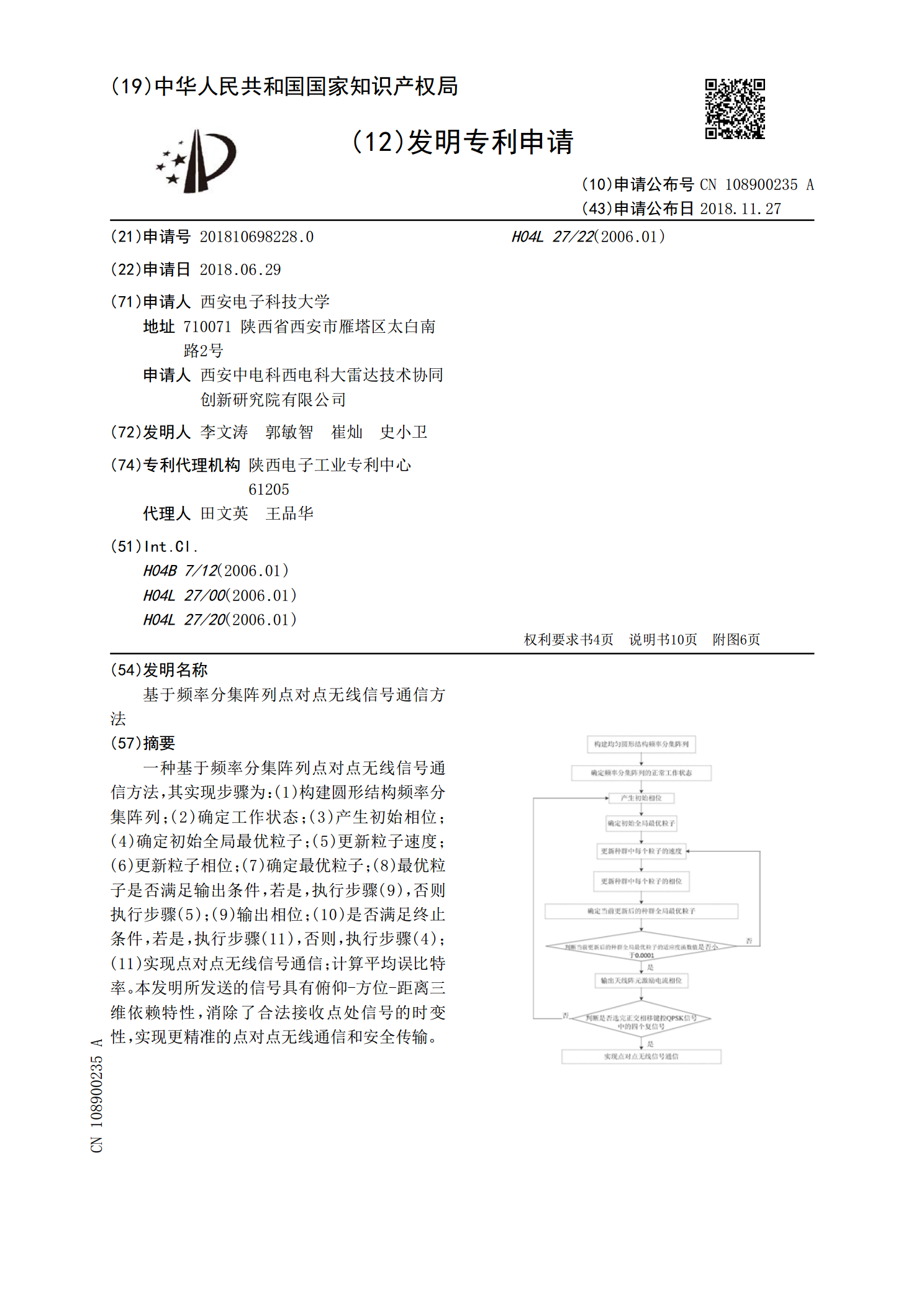
一种基于频率分集阵列点对点无线信号通信方法,其实现步骤为:(1)构建圆形结构频率分集阵列;(2)确定工作状态;(3)产生初始相位;(4)确定初始全局最优粒子;(5)更新粒子速度;(6)更新粒子相位;(7)确定最优粒子;(8)最优粒子是否满足输出条件,若是,执行步骤(9),否则执行步骤(5);(9)输出相位;(10)是否满足终止条件,若是,执行步骤(11),否则,执行步骤(4);(11)实现点对点无线信号通信;计算平均误比特率。本发明所发送的信号具有俯仰‑方位‑距离三维依赖特性,消除了合法接收点处信号的时变
基于快速自适应脉冲压缩的机载气象雷达目标检测方法.pdf
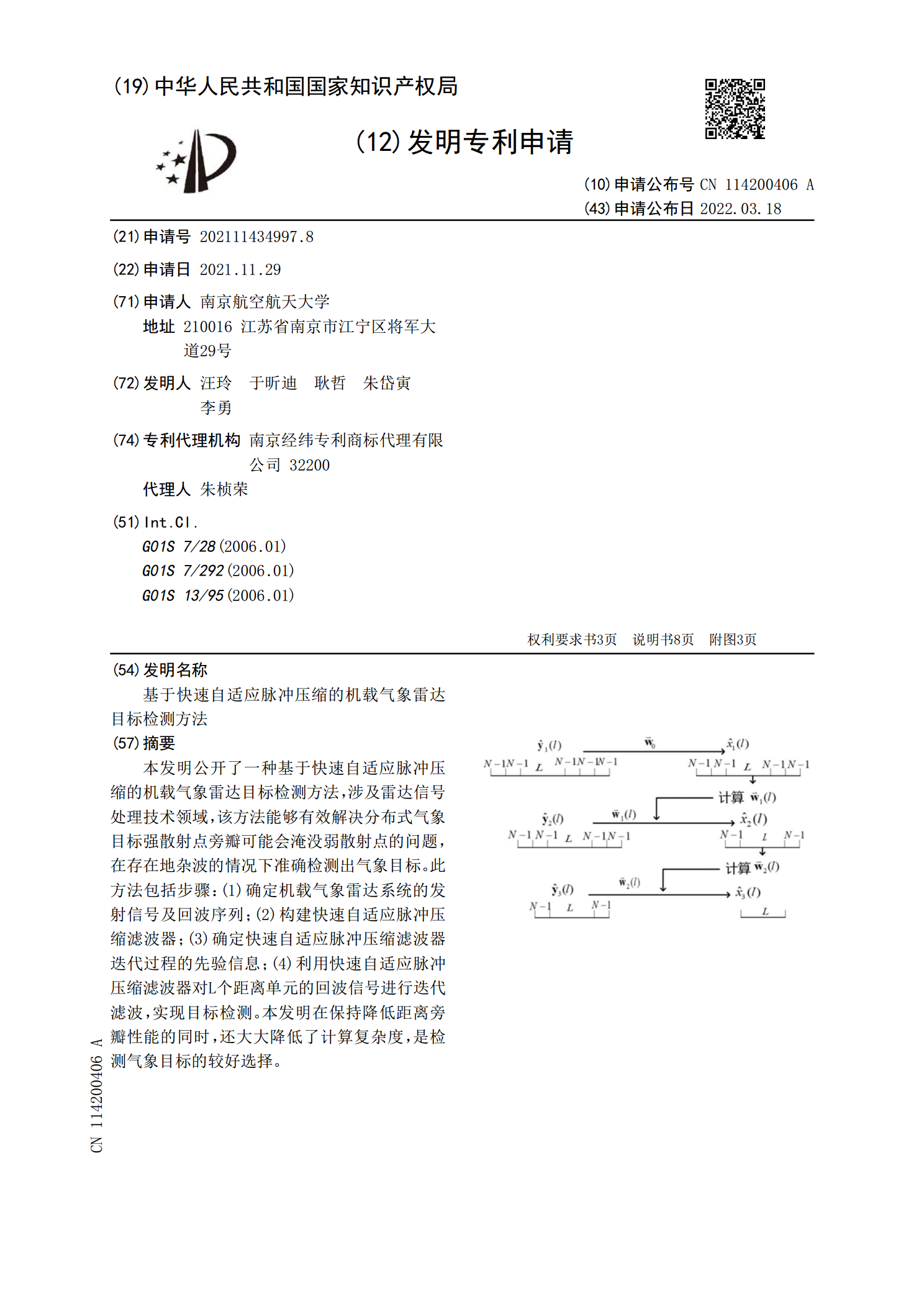
本发明公开了一种基于快速自适应脉冲压缩的机载气象雷达目标检测方法,涉及雷达信号处理技术领域,该方法能够有效解决分布式气象目标强散射点旁瓣可能会淹没弱散射点的问题,在存在地杂波的情况下准确检测出气象目标。此方法包括步骤:(1)确定机载气象雷达系统的发射信号及回波序列;(2)构建快速自适应脉冲压缩滤波器;(3)确定快速自适应脉冲压缩滤波器迭代过程的先验信息;(4)利用快速自适应脉冲压缩滤波器对L个距离单元的回波信号进行迭代滤波,实现目标检测。本发明在保持降低距离旁瓣性能的同时,还大大降低了计算复杂度,是检测气

一种基于CNN的机载气象雷达气象目标检测方法.pdf
本发明公开了一种基于CNN的机载气象雷达气象目标检测方法,包括:通过双通道垂直阵列接收系统接收雷达数据,接收到的雷达数据分为通道1回波数据和通道2回波数据;计算CPA值;计算多普勒速度值;计算干涉相位值,并对干涉相位进行补偿;将获取的CPA值、多普勒速度值和补偿后的涉相位值三种参数信息整合成三维数据;利用训练好的CNN模型对得到的三维数据进行检测,得到气象目标检测结果。本发明首次将CNN应用在气象目标检测,利用垂直阵列系统获取气象目标的多普勒信息和空域信息,然后将三种参数一同输入到CNN中,进而得到最终的