
基于频率分集阵列点对点无线信号通信方法.pdf

雅云****彩妍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于频率分集阵列点对点无线信号通信方法.pdf
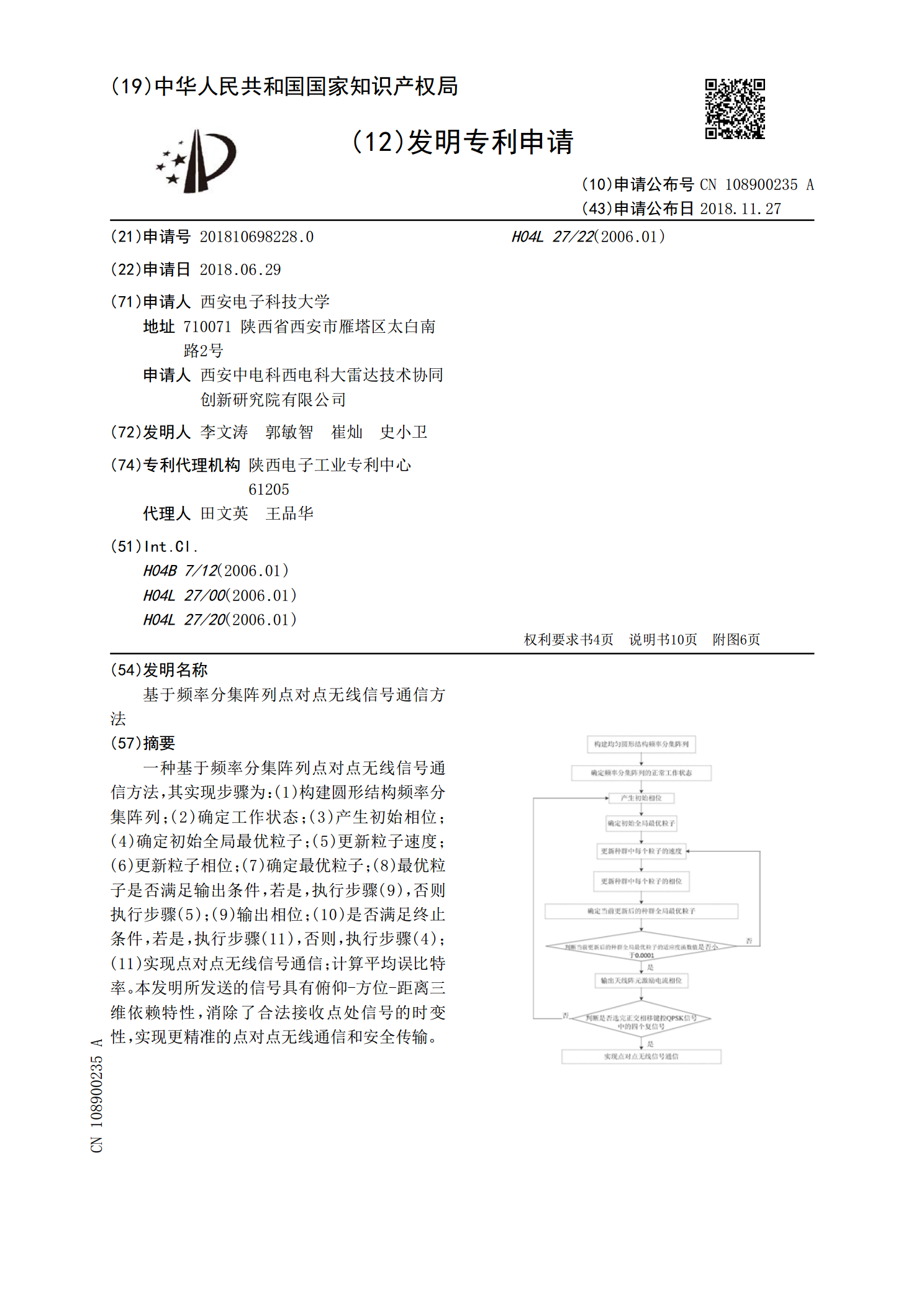
一种基于频率分集阵列点对点无线信号通信方法,其实现步骤为:(1)构建圆形结构频率分集阵列;(2)确定工作状态;(3)产生初始相位;(4)确定初始全局最优粒子;(5)更新粒子速度;(6)更新粒子相位;(7)确定最优粒子;(8)最优粒子是否满足输出条件,若是,执行步骤(9),否则执行步骤(5);(9)输出相位;(10)是否满足终止条件,若是,执行步骤(11),否则,执行步骤(4);(11)实现点对点无线信号通信;计算平均误比特率。本发明所发送的信号具有俯仰‑方位‑距离三维依赖特性,消除了合法接收点处信号的时变

基于正交频率分解的雷达通信共享信号设计方法.pdf
本发明公开了一种基于正交频率分解的雷达通信共享信号设计方法,解决了现有技术中雷达通信共享信号包络起伏大、模糊函数性能差、误码率高及传输速率低的问题。实现步骤包括:设置调频信号参数;雷达通信数据预处理;生成恒包络的雷达通信共享信号;发射与接收脉冲调制信号;探测雷达目标的距离和速度;解调恒包络的雷达通信共享信号。本发明设计了高速率恒包络的雷达通信共享信号,通过调制正交系中各基系数使其携带通信信息,并实现雷达探测功能。克服了传统技术在调制通信数据后降低信号模糊函数性能,数据解调过程中误码率高,对多普勒不稳健的问

基于无线信号的监测方法及装置.pdf
本发明提出一种基于无线信号的监测方法及装置,技术方案如下:检测移动设备所发出无线信号的持续时间;判断无线信号的持续时间是否大于或等于预设时间长度阈值;若是,则将移动设备的信息保存到后台。本发明用于计算参观展览物品的人数,通过在展览平台或者货架上设置检测工具,实时检测过往人群中有多少人到参观平台参观,或者有多少人对货架上的物品有购买倾向等。
基于时间分集阵列的发射端波束形成方法.pdf
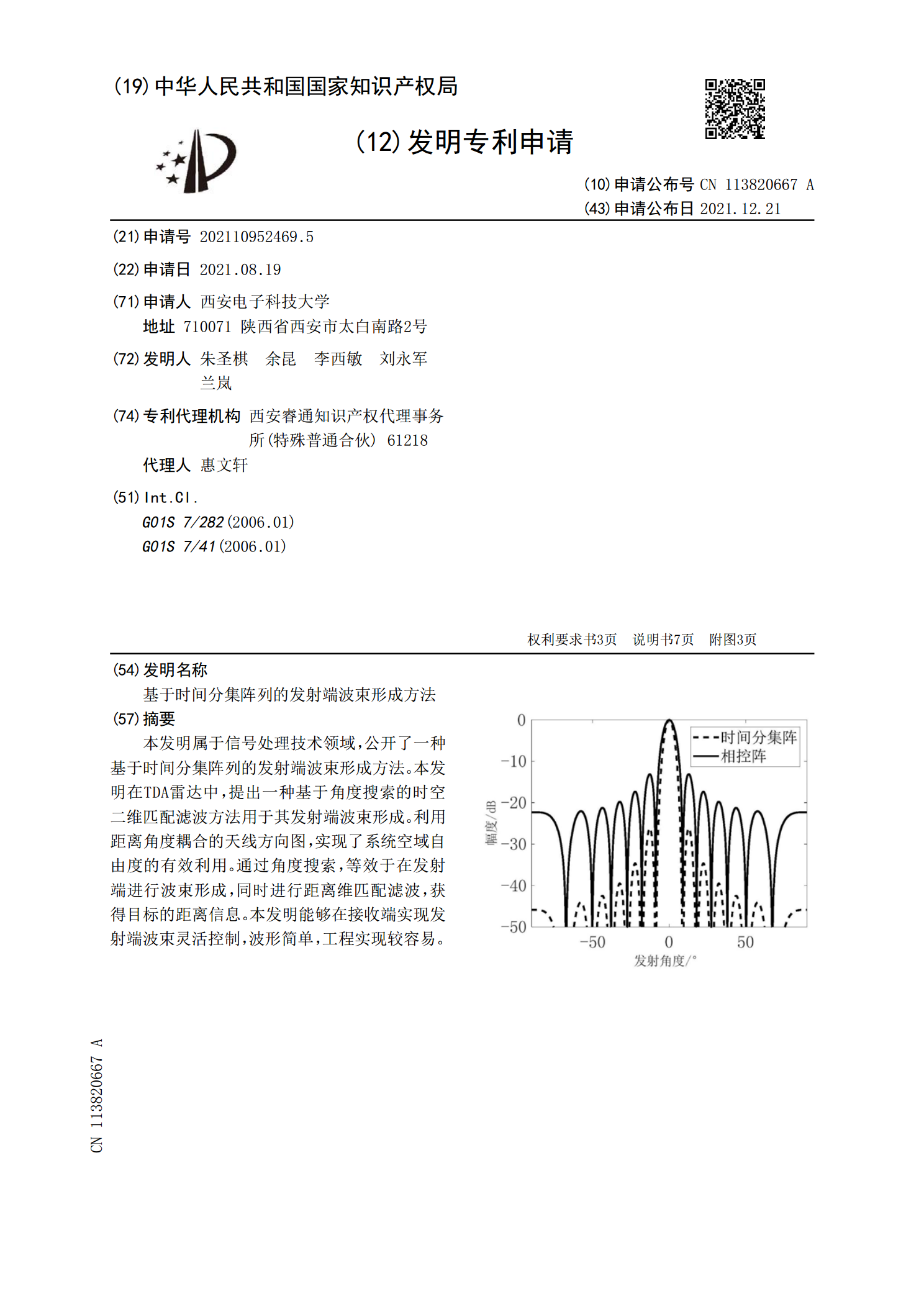
本发明属于信号处理技术领域,公开了一种基于时间分集阵列的发射端波束形成方法。本发明在TDA雷达中,提出一种基于角度搜索的时空二维匹配滤波方法用于其发射端波束形成。利用距离角度耦合的天线方向图,实现了系统空域自由度的有效利用。通过角度搜索,等效于在发射端进行波束形成,同时进行距离维匹配滤波,获得目标的距离信息。本发明能够在接收端实现发射端波束灵活控制,波形简单,工程实现较容易。

一种基于主瓣幅度响应控制的机载频率分集阵列雷达快速运动目标检测方法.pdf
本发明公开了一种基于主瓣幅度响应控制的机载频率分集阵列雷达快速运动目标检测方法,机载频率分集阵列雷达目标和杂波数据采集;快速运动目标角度多普勒散焦分析;基于主瓣幅度响应约束的稳健FDA空时自适应处理方法;杂波抑制和快速运动目标检测。本发明具有基于幅度响应约束技术,在目标感兴趣的空时域内设计了主瓣空时响应约束来解决目标空时导向矢量严重失配的问题;在快速运动目标角度‑多普勒散焦区域设计了非聚焦空时响应约束,并建立了包含杂波协方差矩阵非理想因素的稳健FDA‑STAP优化问题,得到了稳健FDA‑STAP权矢量,获