
一种基于CNN的机载气象雷达气象目标检测方法.pdf

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于CNN的机载气象雷达气象目标检测方法.pdf
本发明公开了一种基于CNN的机载气象雷达气象目标检测方法,包括:通过双通道垂直阵列接收系统接收雷达数据,接收到的雷达数据分为通道1回波数据和通道2回波数据;计算CPA值;计算多普勒速度值;计算干涉相位值,并对干涉相位进行补偿;将获取的CPA值、多普勒速度值和补偿后的涉相位值三种参数信息整合成三维数据;利用训练好的CNN模型对得到的三维数据进行检测,得到气象目标检测结果。本发明首次将CNN应用在气象目标检测,利用垂直阵列系统获取气象目标的多普勒信息和空域信息,然后将三种参数一同输入到CNN中,进而得到最终的
基于快速自适应脉冲压缩的机载气象雷达目标检测方法.pdf
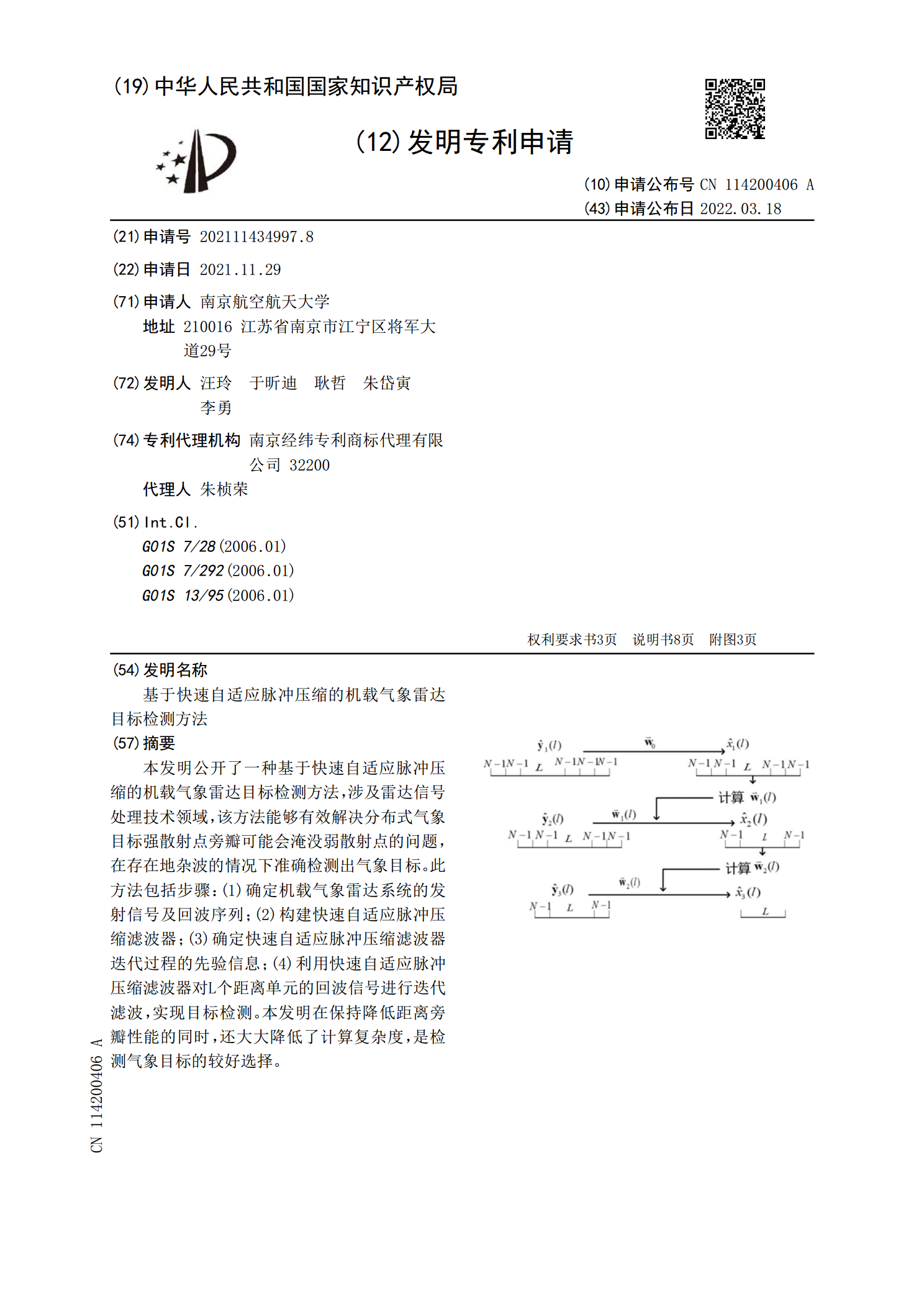
本发明公开了一种基于快速自适应脉冲压缩的机载气象雷达目标检测方法,涉及雷达信号处理技术领域,该方法能够有效解决分布式气象目标强散射点旁瓣可能会淹没弱散射点的问题,在存在地杂波的情况下准确检测出气象目标。此方法包括步骤:(1)确定机载气象雷达系统的发射信号及回波序列;(2)构建快速自适应脉冲压缩滤波器;(3)确定快速自适应脉冲压缩滤波器迭代过程的先验信息;(4)利用快速自适应脉冲压缩滤波器对L个距离单元的回波信号进行迭代滤波,实现目标检测。本发明在保持降低距离旁瓣性能的同时,还大大降低了计算复杂度,是检测气
机载气象雷达的气象与地杂波的鉴别方法.pdf
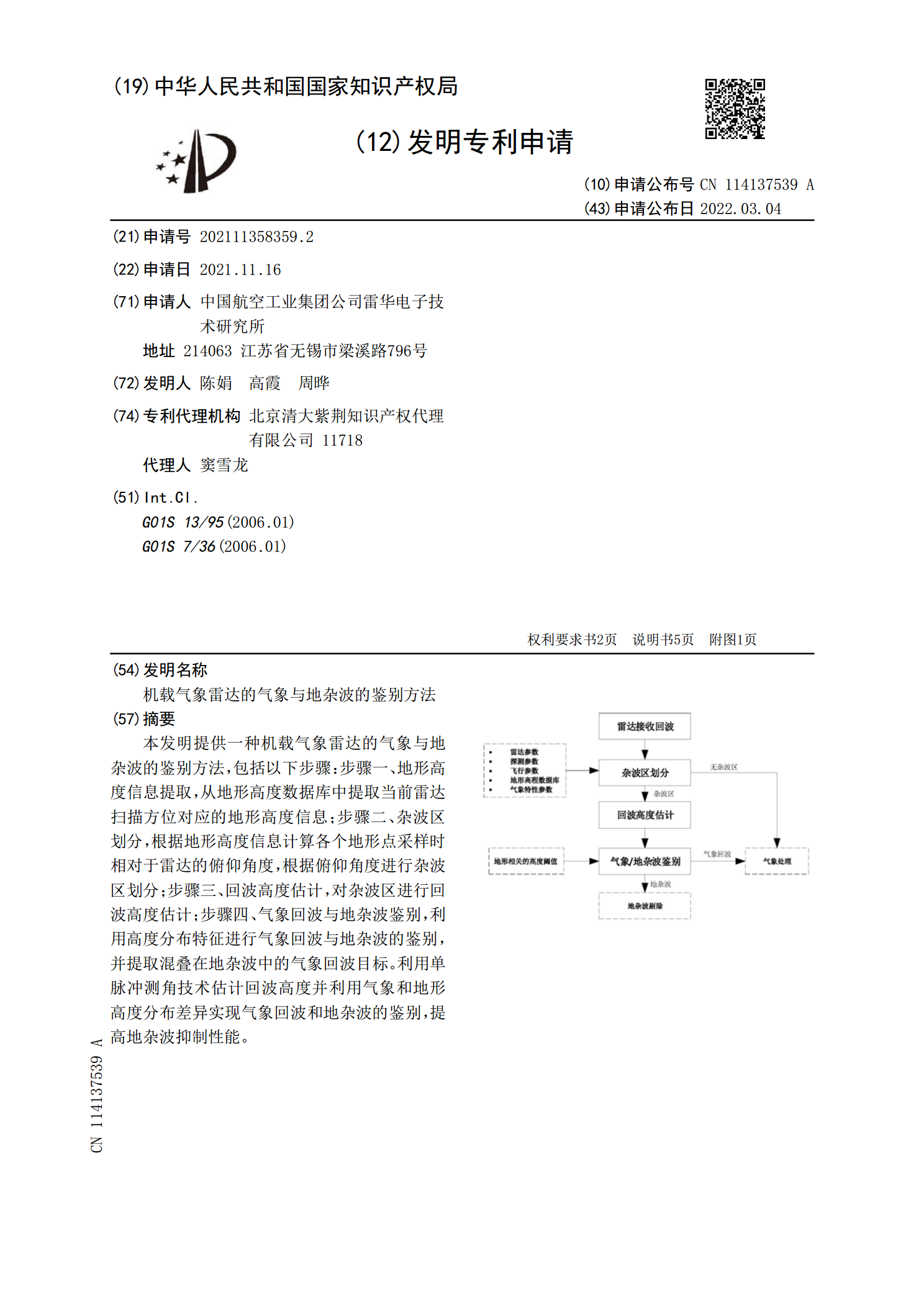
本发明提供一种机载气象雷达的气象与地杂波的鉴别方法,包括以下步骤:步骤一、地形高度信息提取,从地形高度数据库中提取当前雷达扫描方位对应的地形高度信息;步骤二、杂波区划分,根据地形高度信息计算各个地形点采样时相对于雷达的俯仰角度,根据俯仰角度进行杂波区划分;步骤三、回波高度估计,对杂波区进行回波高度估计;步骤四、气象回波与地杂波鉴别,利用高度分布特征进行气象回波与地杂波的鉴别,并提取混叠在地杂波中的气象回波目标。利用单脉冲测角技术估计回波高度并利用气象和地形高度分布差异实现气象回波和地杂波的鉴别,提高地杂波

一种机载多扫描气象雷达目标垂直轮廓重建方法.pdf
本发明公开了一种机载多扫描气象雷达目标垂直轮廓重建方法,利用多扫描机载气象雷达获取的气象回波信息实现对飞机前方气象目标垂直轮廓的显示,快速、准确、全面地反映出气象目标雷达反射率因子在高度维的强度变化与分布范围。本发明通过机载气象雷达载在多扫描工作模式下得到至少8层气象目标信息,并在信息重建过程中创新地运用气象学统计气象目标反射率因子变化规律统计模型;本发明所提供的多扫描机载气象雷达目标垂直轮廓重建方法能够利用多扫描回波信息真实、完整地再现载机航路正前方气象目标垂直轮廓。本发明具有方法简单、操作方便的优点,

机载气象雷达充塞系数估计方法.docx
机载气象雷达充塞系数估计方法标题:机载气象雷达充塞系数估计方法摘要:机载气象雷达是一种用于获取大气中降水信息的重要设备。充塞是机载气象雷达中常见的问题之一,它会导致可观测到的目标数量减少,从而降低雷达的检测能力和数据质量。因此,准确估计机载气象雷达的充塞系数对于提高雷达数据的准确性和应用范围具有重要意义。本论文就机载气象雷达充塞系数的估计方法进行了详细的介绍和分析,并提出了改进方法,以期提高充塞系数估计的准确性。关键词:机载气象雷达;充塞系数;检测能力;数据质量;估计方法第一节:引言1.1研究背景1.2研