
一种基于等效旋转矢量算法的捷联惯导系统优化方法.pdf

是秋****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于等效旋转矢量算法的捷联惯导系统优化方法.pdf
本发明公开一种基于等效旋转矢量算法的捷联惯导系统优化方法,该方法为,以圆锥运动轨迹作为测试条件,对旋转矢量算法中的系数做优化,根据圆锥运动可得到理论四元数,利用旋转矢量得到计算四元数,对理论四元数与计算四元数作差,得误差四元数,对误差四元数进行泰勒级数展开,通过选择最优化系数,使得误差项为零。根据光纤陀螺输出为角速率的特点,使用角增量和角速率,以角速率为主,其精度高于二子样算法,运算量相当,该方法还能够有效补偿光纤惯导的圆锥误差。在只有角速率输入时,改进算法圆锥补偿精度比传统优化算法要高2个数量级,且计算

基于优化旋转矢量双子样算法的捷联惯导姿态解算.docx
基于优化旋转矢量双子样算法的捷联惯导姿态解算基于优化旋转矢量双子样算法的捷联惯导姿态解算摘要:捷联惯导系统是一种常见的用于航天器、飞行器等载体的姿态解算和定位的系统。其中,姿态解算是捷联惯导中的一个关键问题。本文基于优化旋转矢量双子样算法,研究了捷联惯导的姿态解算问题。通过分析捷联惯导的原理和姿态解算中存在的问题,引入了优化旋转矢量双子样算法。实验证明,该算法能有效解决捷联惯导中的姿态解算问题,提高导航精度和稳定性。1.引言捷联惯导是一种基于多传感器的导航系统,包括惯性传感器、全球导航卫星系统(GNSS)

捷联惯导系统算法.ppt
捷联惯导基本算法惯性器件误差加速度计姿态计算欧拉角微分方程1姿态计算欧拉角微分方程2姿态计算欧拉角微分方程3姿态计算矩阵方程精确解1姿态计算矩阵方程精确解2姿态计算四元数精确解1姿态计算四元数精确解2姿态计算姿态航向角计算1姿态计算姿态航向角计算2姿态实时计算概述增量算法矩阵方程精确解增量算法矩阵方程CS参数增量算法矩阵方程1阶增量算法矩阵方程1阶增量算法矩阵方程2-4阶增量算法四元数增量算法四元数增量算法四元数增量算法四元数数值积分1阶数值积分1阶矩阵数值积分1阶四元数数值积分2阶矩阵数值积分2阶矩阵数

捷联惯导飞行器旋转矢量姿态优化仿真研究.docx
捷联惯导飞行器旋转矢量姿态优化仿真研究本文根据题目,探讨了捷联惯导飞行器旋转矢量姿态优化仿真研究相关内容。首先介绍了惯性导航系统和其在飞行器中的应用以及姿态控制的重要性,接着阐述了旋转矢量姿态表示方法和姿态优化控制算法,并进行了仿真验证,最后总结了文章的主要内容。一、介绍惯性导航系统是一种基于运动学原理的飞行控制技术,通过测量飞行器的加速度和角速度变化来推算出其运动状态,从而实现精确的导航控制。惯性导航系统广泛应用于航空、卫星、导弹等领域,具有高精度、高稳定性、无需依赖信号等优点,是现代飞行控制领域中不可
一种基于盲分离算法的捷联惯导信号提取方法及系统.pdf
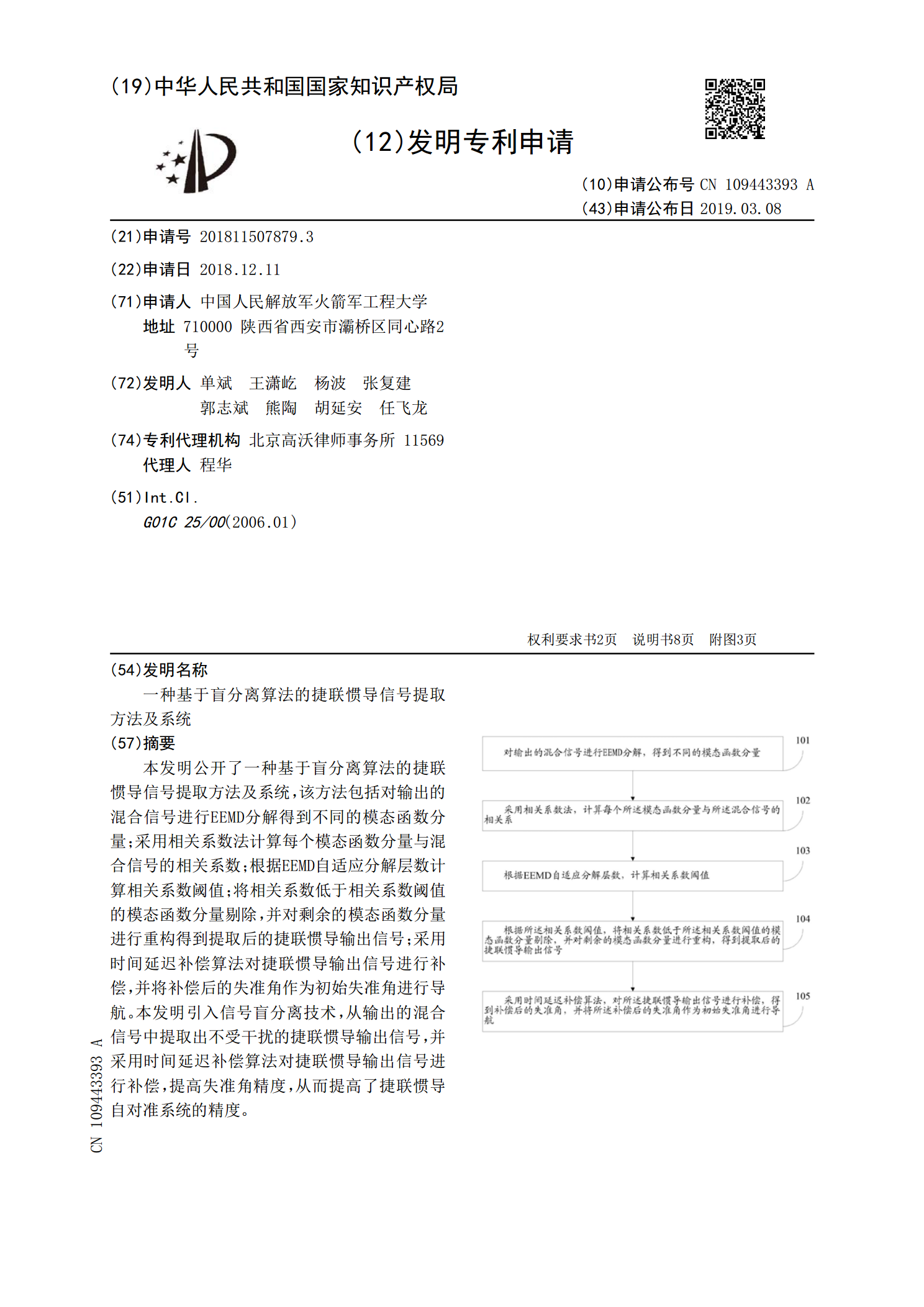
本发明公开了一种基于盲分离算法的捷联惯导信号提取方法及系统,该方法包括对输出的混合信号进行EEMD分解得到不同的模态函数分量;采用相关系数法计算每个模态函数分量与混合信号的相关系数;根据EEMD自适应分解层数计算相关系数阈值;将相关系数低于相关系数阈值的模态函数分量剔除,并对剩余的模态函数分量进行重构得到提取后的捷联惯导输出信号;采用时间延迟补偿算法对捷联惯导输出信号进行补偿,并将补偿后的失准角作为初始失准角进行导航。本发明引入信号盲分离技术,从输出的混合信号中提取出不受干扰的捷联惯导输出信号,并采用时间