
一种基于盲分离算法的捷联惯导信号提取方法及系统.pdf

是你****岺呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于盲分离算法的捷联惯导信号提取方法及系统.pdf
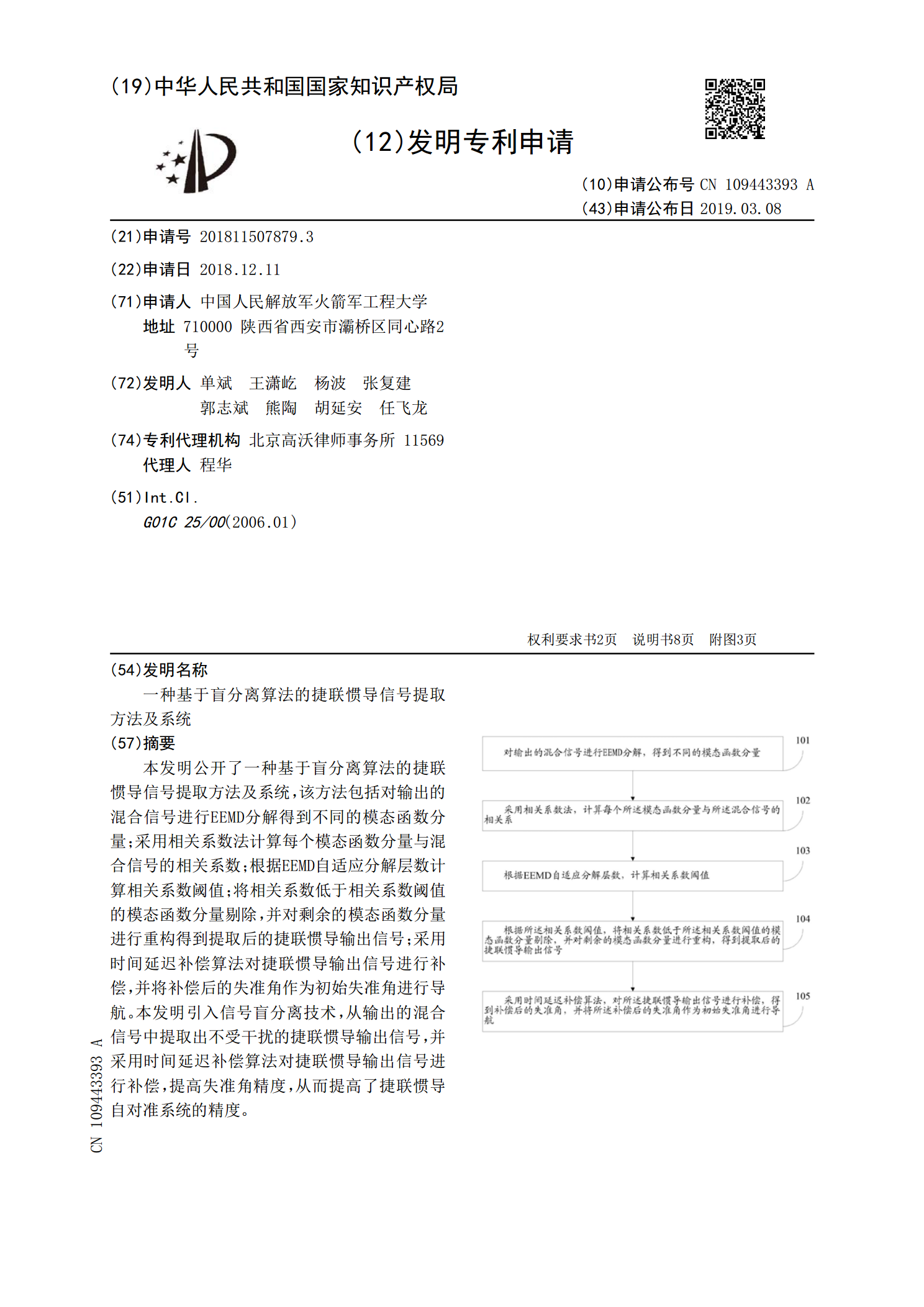
本发明公开了一种基于盲分离算法的捷联惯导信号提取方法及系统,该方法包括对输出的混合信号进行EEMD分解得到不同的模态函数分量;采用相关系数法计算每个模态函数分量与混合信号的相关系数;根据EEMD自适应分解层数计算相关系数阈值;将相关系数低于相关系数阈值的模态函数分量剔除,并对剩余的模态函数分量进行重构得到提取后的捷联惯导输出信号;采用时间延迟补偿算法对捷联惯导输出信号进行补偿,并将补偿后的失准角作为初始失准角进行导航。本发明引入信号盲分离技术,从输出的混合信号中提取出不受干扰的捷联惯导输出信号,并采用时间

基于分离积分的捷联惯导系统改进算法.docx
基于分离积分的捷联惯导系统改进算法基于分离积分的惯性导航系统改进算法摘要:惯性导航系统是一种常用的导航系统,广泛应用于航天、航空、航海等领域。然而,由于系统本身存在误差和不确定性,传统的惯性导航算法在长时间导航中会积累较大误差。本文提出一种基于分离积分的惯性导航系统改进算法,通过分离和优化积分过程,有效降低系统误差,提高导航精度。1.引言惯性导航系统是一种以惯性测量单元(IMU)为核心的导航系统,通过测量物体的加速度和角速度来估计其位置和姿态。然而,由于惯性传感器本身存在漂移、噪声等误差,以及环境扰动等不

捷联惯导系统算法.ppt
捷联惯导基本算法惯性器件误差加速度计姿态计算欧拉角微分方程1姿态计算欧拉角微分方程2姿态计算欧拉角微分方程3姿态计算矩阵方程精确解1姿态计算矩阵方程精确解2姿态计算四元数精确解1姿态计算四元数精确解2姿态计算姿态航向角计算1姿态计算姿态航向角计算2姿态实时计算概述增量算法矩阵方程精确解增量算法矩阵方程CS参数增量算法矩阵方程1阶增量算法矩阵方程1阶增量算法矩阵方程2-4阶增量算法四元数增量算法四元数增量算法四元数增量算法四元数数值积分1阶数值积分1阶矩阵数值积分1阶四元数数值积分2阶矩阵数值积分2阶矩阵数

一种基于等效旋转矢量算法的捷联惯导系统优化方法.pdf
本发明公开一种基于等效旋转矢量算法的捷联惯导系统优化方法,该方法为,以圆锥运动轨迹作为测试条件,对旋转矢量算法中的系数做优化,根据圆锥运动可得到理论四元数,利用旋转矢量得到计算四元数,对理论四元数与计算四元数作差,得误差四元数,对误差四元数进行泰勒级数展开,通过选择最优化系数,使得误差项为零。根据光纤陀螺输出为角速率的特点,使用角增量和角速率,以角速率为主,其精度高于二子样算法,运算量相当,该方法还能够有效补偿光纤惯导的圆锥误差。在只有角速率输入时,改进算法圆锥补偿精度比传统优化算法要高2个数量级,且计算

基于捷联惯导系统的捷联罗经姿态测量方法.pdf
本发明提供一种基于捷联惯导系统的捷联罗经姿态测量方法。利用一套惯性测量组件信息,所述的惯性测量组件包括加速度计和陀螺,在导航计算机内运行捷联惯导系统、捷联罗经系统程序,分别建立捷联惯导系统、捷联罗经系统数学平台,利用捷联惯导系统输出速度和纬度补偿船舶速度、纬度和加速度对于捷联罗经系统的影响。本发明的方法不需引入外部速度参考设备,如电磁计程仪、多普勒计程仪,因此具有成本低、使用方便等优势。