
捷联惯导系统算法.ppt

kp****93


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

捷联惯导系统算法.ppt
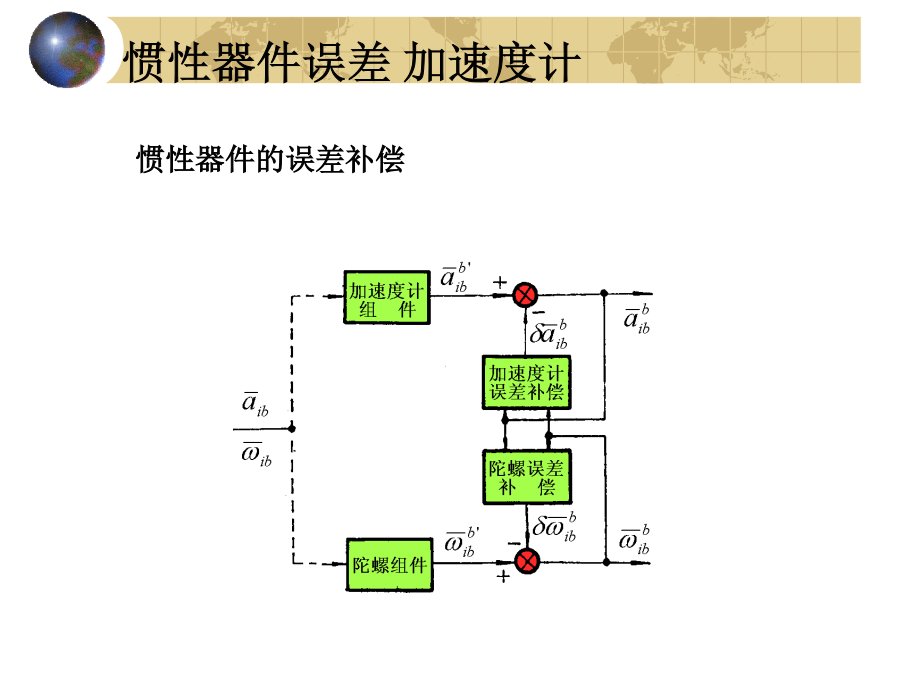
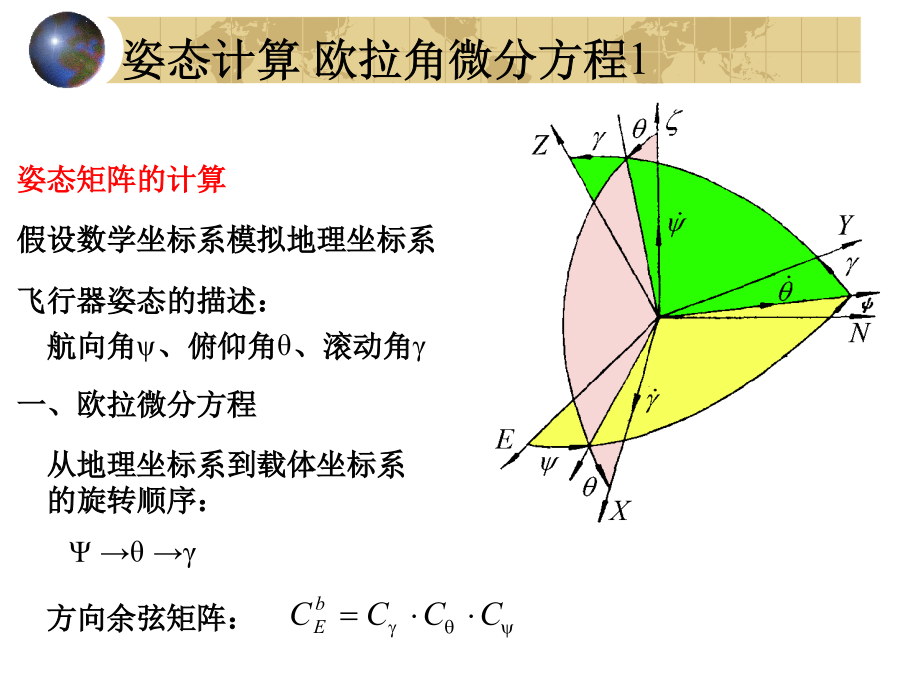
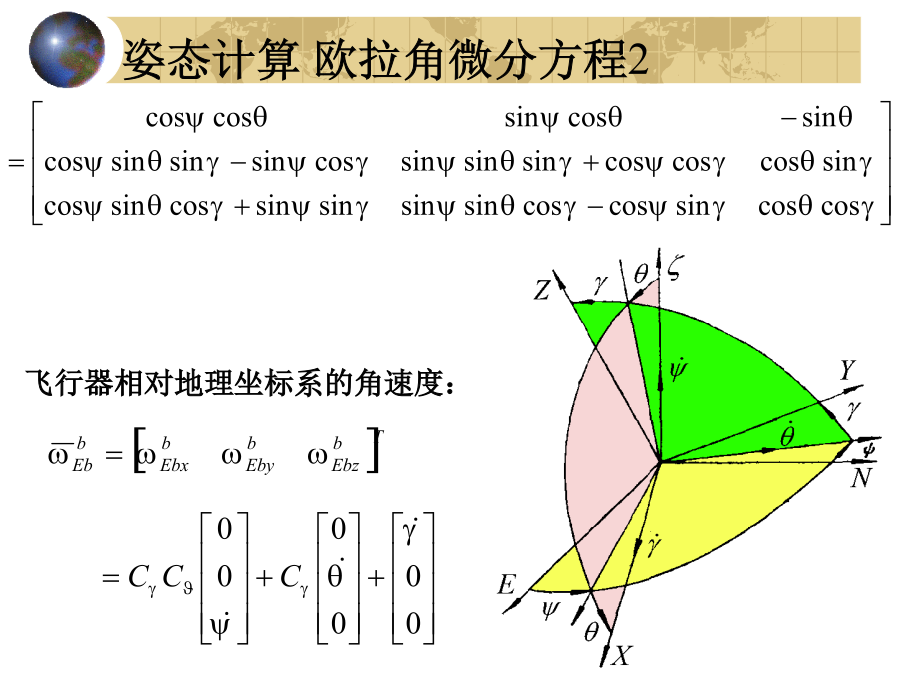
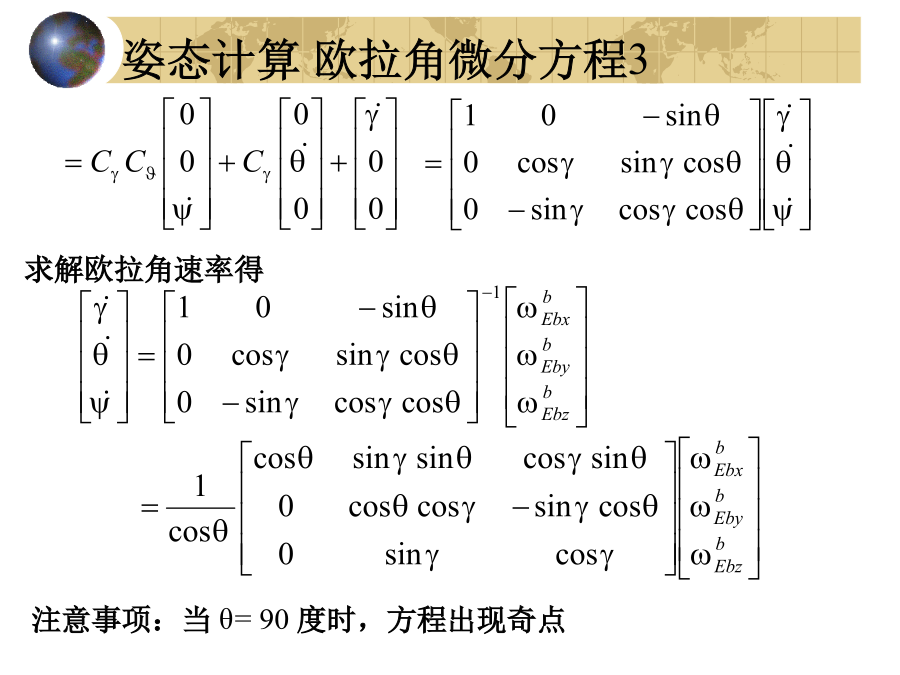
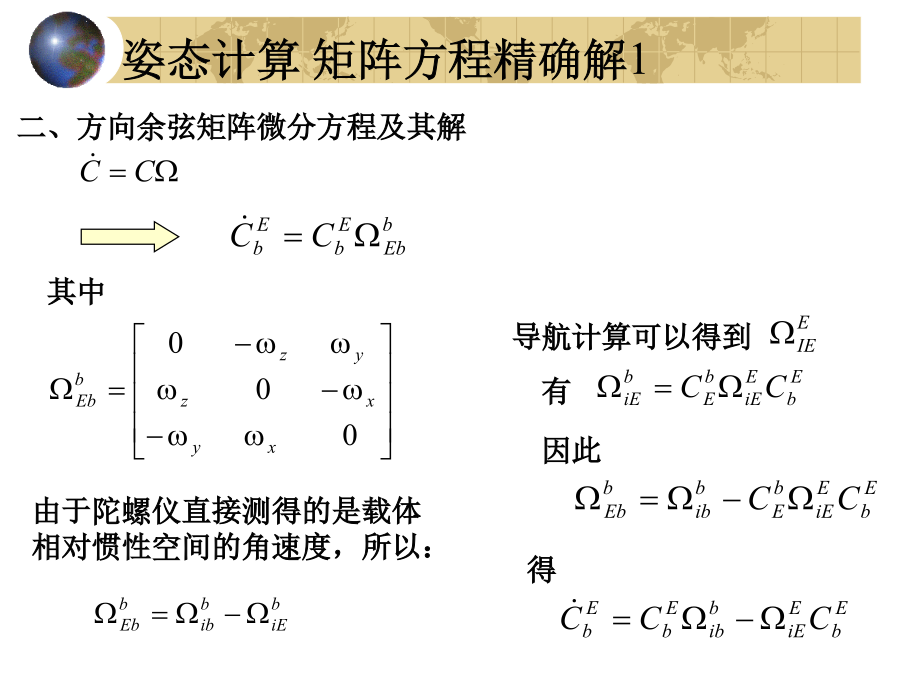
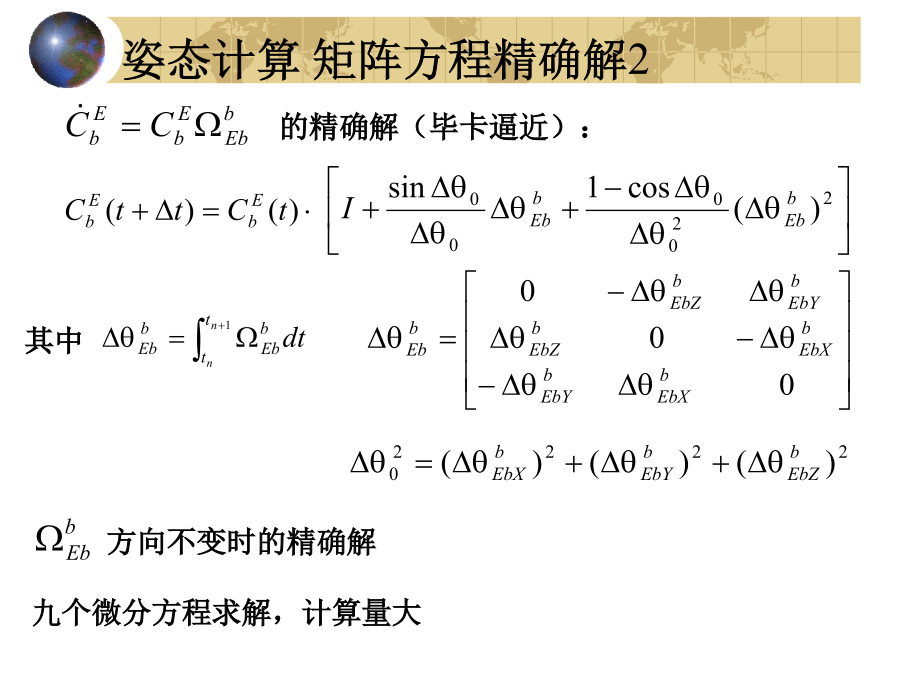
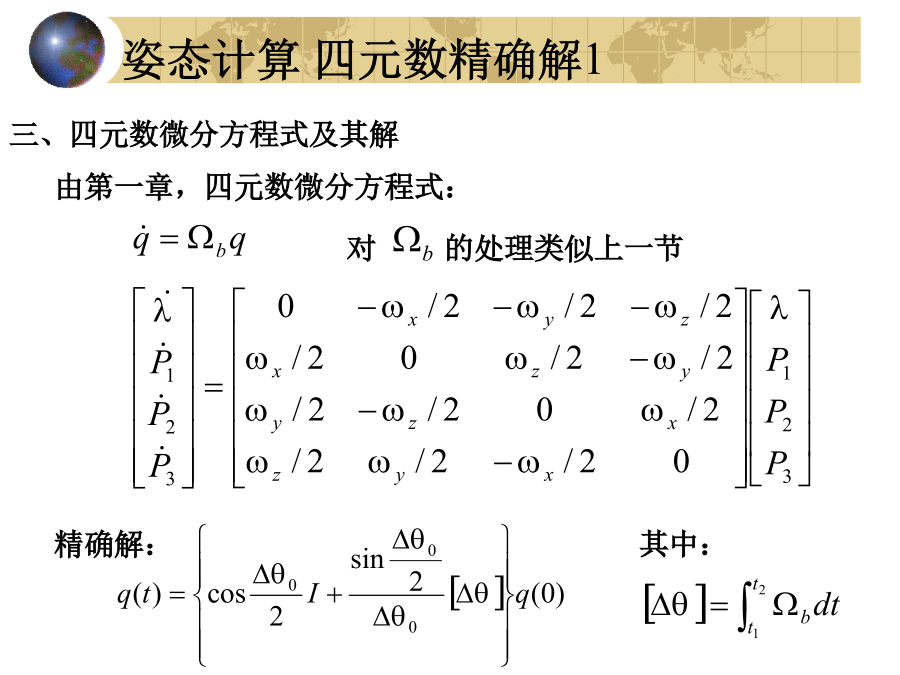
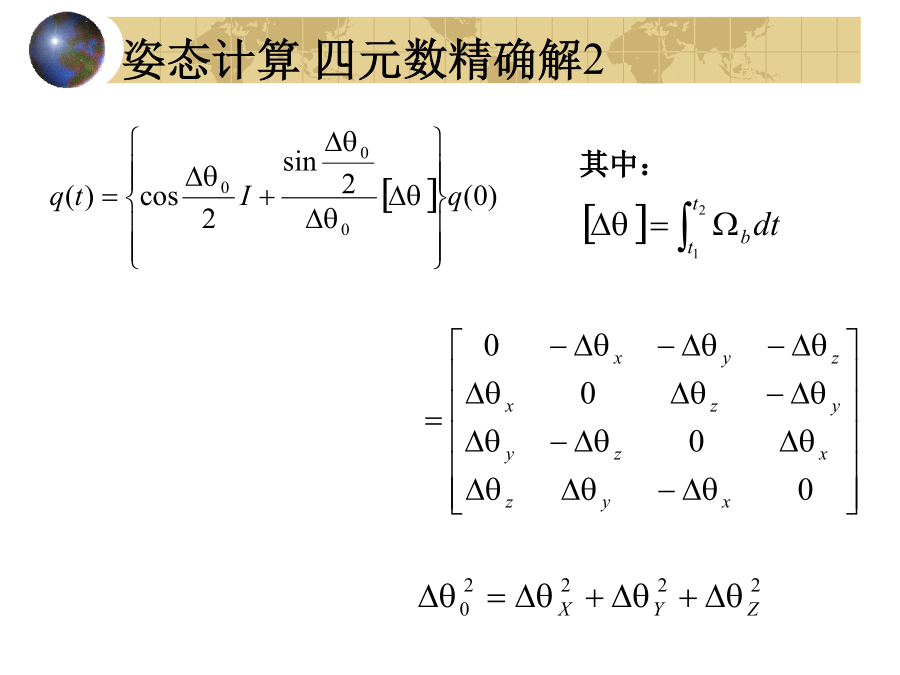
捷联惯导基本算法惯性器件误差加速度计姿态计算欧拉角微分方程1姿态计算欧拉角微分方程2姿态计算欧拉角微分方程3姿态计算矩阵方程精确解1姿态计算矩阵方程精确解2姿态计算四元数精确解1姿态计算四元数精确解2姿态计算姿态航向角计算1姿态计算姿态航向角计算2姿态实时计算概述增量算法矩阵方程精确解增量算法矩阵方程CS参数增量算法矩阵方程1阶增量算法矩阵方程1阶增量算法矩阵方程2-4阶增量算法四元数增量算法四元数增量算法四元数增量算法四元数数值积分1阶数值积分1阶矩阵数值积分1阶四元数数值积分2阶矩阵数值积分2阶矩阵数

基于分离积分的捷联惯导系统改进算法.docx
基于分离积分的捷联惯导系统改进算法基于分离积分的惯性导航系统改进算法摘要:惯性导航系统是一种常用的导航系统,广泛应用于航天、航空、航海等领域。然而,由于系统本身存在误差和不确定性,传统的惯性导航算法在长时间导航中会积累较大误差。本文提出一种基于分离积分的惯性导航系统改进算法,通过分离和优化积分过程,有效降低系统误差,提高导航精度。1.引言惯性导航系统是一种以惯性测量单元(IMU)为核心的导航系统,通过测量物体的加速度和角速度来估计其位置和姿态。然而,由于惯性传感器本身存在漂移、噪声等误差,以及环境扰动等不

基于飞行轨迹的捷联惯导系统算法仿真.docx
基于飞行轨迹的捷联惯导系统算法仿真基于飞行轨迹的捷联惯导系统算法仿真摘要:随着航空技术的发展,捷联惯导系统在飞行控制中起到了重要的作用。本论文以飞行轨迹为基础,研究了基于飞行轨迹的捷联惯导系统算法,并进行了仿真分析。首先介绍了捷联惯导系统的原理和优势,然后对基于飞行轨迹的捷联惯导系统算法进行详细说明。最后,通过仿真实验验证了该算法的可行性和性能。结果表明,基于飞行轨迹的捷联惯导系统算法能够更准确地估计飞行器的位置和姿态,并具有较高的稳定性和鲁棒性。关键词:捷联惯导系统,飞行轨迹,算法仿真,位置估计,姿态估

无陀螺捷联惯导系统的姿态算法研究与实现.docx
无陀螺捷联惯导系统的姿态算法研究与实现无陀螺捷联惯导系统的姿态算法研究与实现摘要随着人类社会的不断发展,姿态控制技术在现代航空、导航、无人机等领域中得到广泛应用。传统的姿态控制中采用的是陀螺仪和加速度计等惯性传感器,该方法存在精度低、造价高等问题。因此,近年来人们更加关注无陀螺捷联惯导系统的姿态算法,该系统采用的是多传感器融合技术,可以有效提高精度和鲁棒性。本文先介绍了traditionalattitudecontrolalgorithm的原理,再讨论无陀螺捷联惯导系统的姿态算法的原理和优劣势,最后通过实

无陀螺捷联惯导系统算法研究的中期报告.docx
无陀螺捷联惯导系统算法研究的中期报告一、研究背景惯性导航系统是一种在没有地面参考的情况下确定运动员位置、速度和加速度的技术。近年来,随着汽车、船舶、飞机等各种交通工具的发展,惯性导航系统已被广泛应用于导航和定位领域。然而,传统的惯性导航系统存在很多问题。例如,它们往往在长期使用后会导致姿态漂移,导致位置和速度误差累积。为了解决这些问题,产生了无陀螺惯导系统。无陀螺惯导系统通过使用加速度计和磁力计等传感器来估计运动状态而不是依靠陀螺仪。与传统的惯性导航系统相比,它具有更好的稳定性和更少的漂移。二、研究内容本