
一种快照式穆勒矩阵椭偏仪器件的方位角误差校准方法.pdf

骊英****bb

1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种快照式穆勒矩阵椭偏仪器件的方位角误差校准方法.pdf
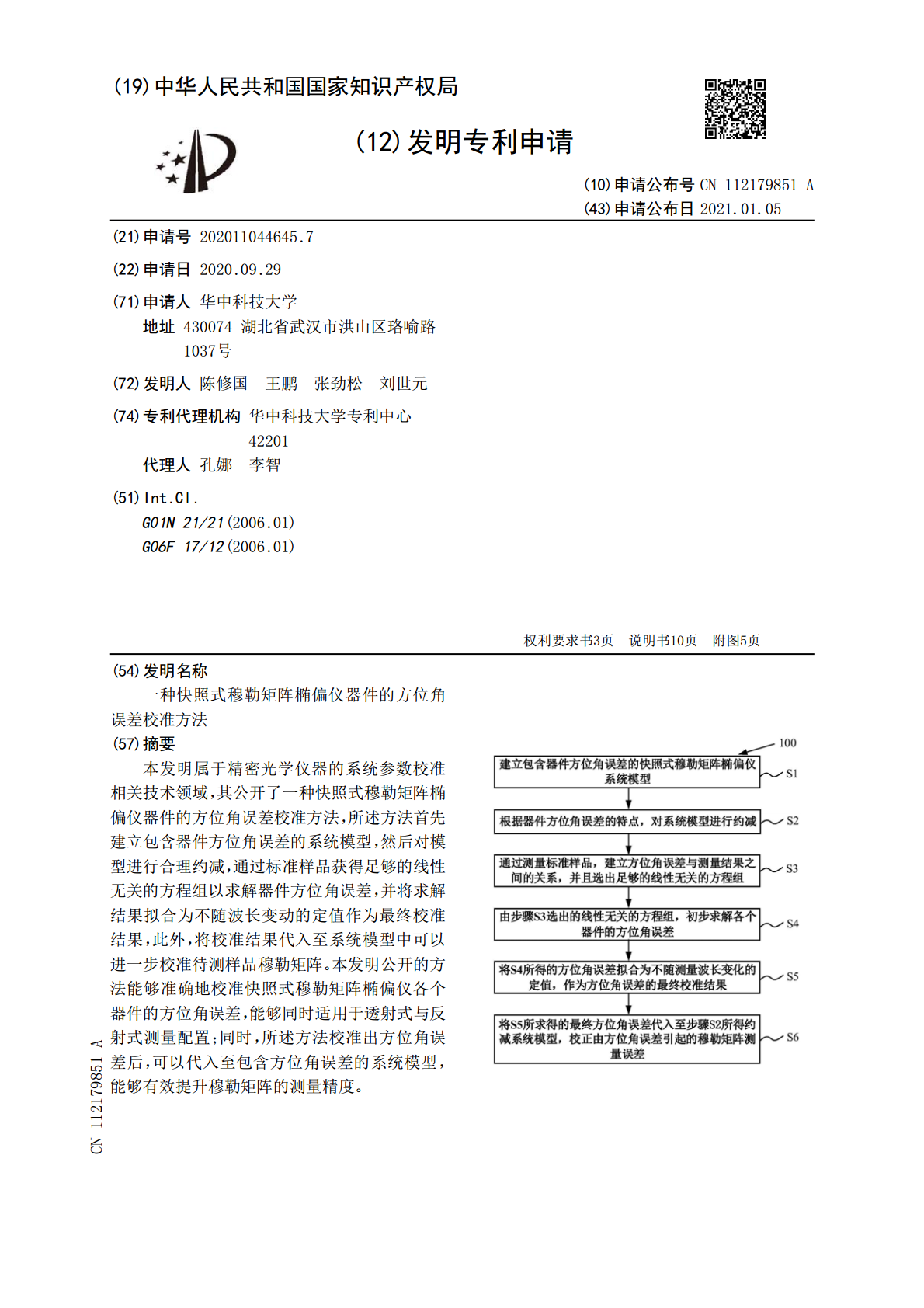
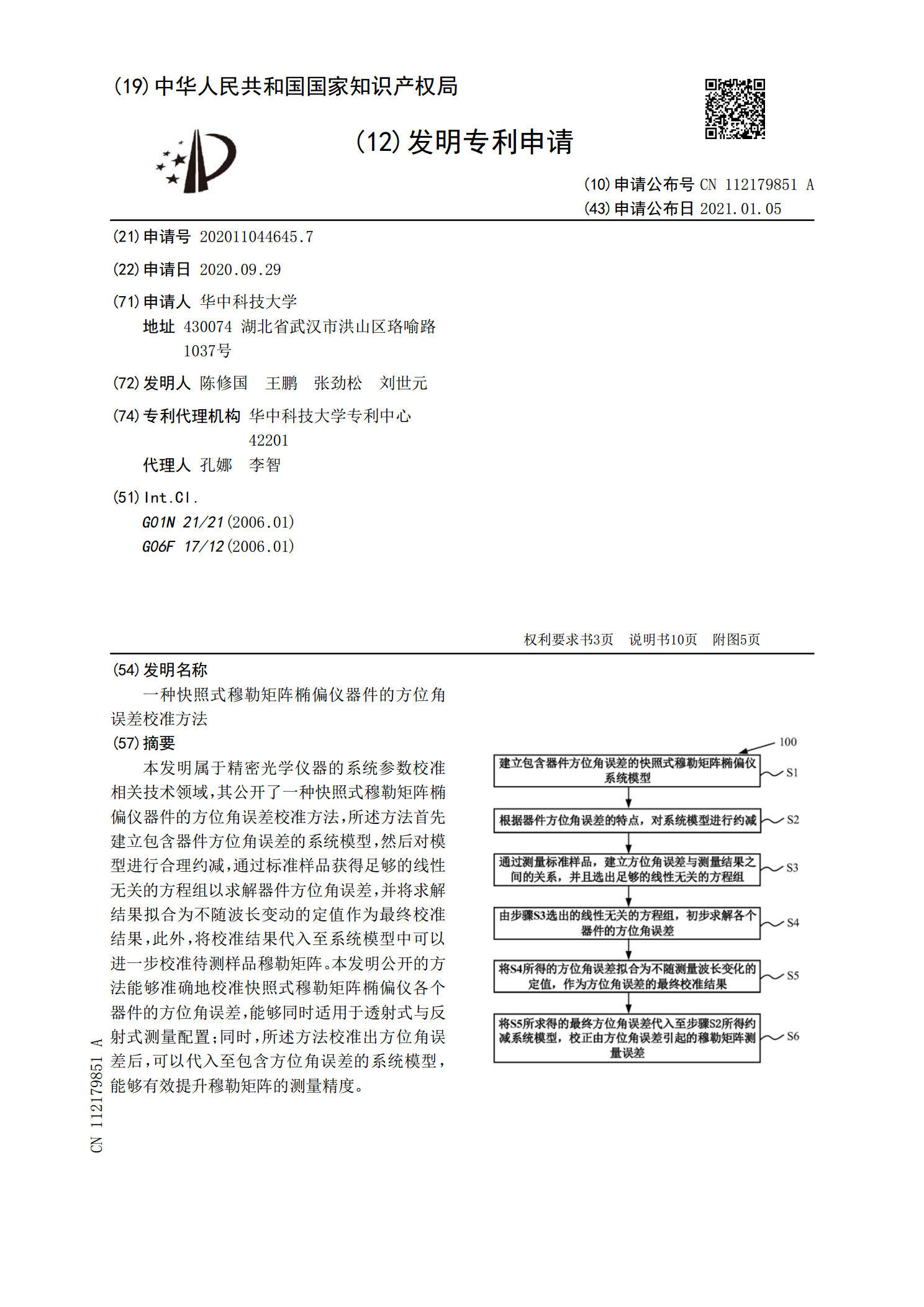
本发明属于精密光学仪器的系统参数校准相关技术领域,其公开了一种快照式穆勒矩阵椭偏仪器件的方位角误差校准方法,所述方法首先建立包含器件方位角误差的系统模型,然后对模型进行合理约减,通过标准样品获得足够的线性无关的方程组以求解器件方位角误差,并将求解结果拟合为不随波长变动的定值作为最终校准结果,此外,将校准结果代入至系统模型中可以进一步校准待测样品穆勒矩阵。本发明公开的方法能够准确地校准快照式穆勒矩阵椭偏仪各个器件的方位角误差,能够同时适用于透射式与反射式测量配置;同时,所述方法校准出方位角误差后,可以代入至

快照式穆勒矩阵椭偏仪相位延迟量误差的通用校准方法.pdf
本发明属于精密光学测量仪器系统参数校准领域,并具体公开了一种快照式穆勒矩阵椭偏仪相位延迟量误差的通用校准方法,其包括如下步骤:S1、按预设相位延迟器厚度比搭建快照式穆勒矩阵椭偏仪,然后对三组标准样品进行测量,得到三组测量光谱;S2、分别对三组测量光谱进行频域分析得到频域信号,对频域信号进行分通道处理得到多阶频率通道,再根据相位延迟器厚度比对频率通道进行选择;S3、对选择的频率通道进行波数域分析计算,获得各频率通道对应的测量光谱三角函数展开式的实频、虚频系数,进而得到各相位延迟器的相位延迟量误差。本发明能准
旋转器件型穆勒矩阵椭偏仪系统参数的校准方法.pdf
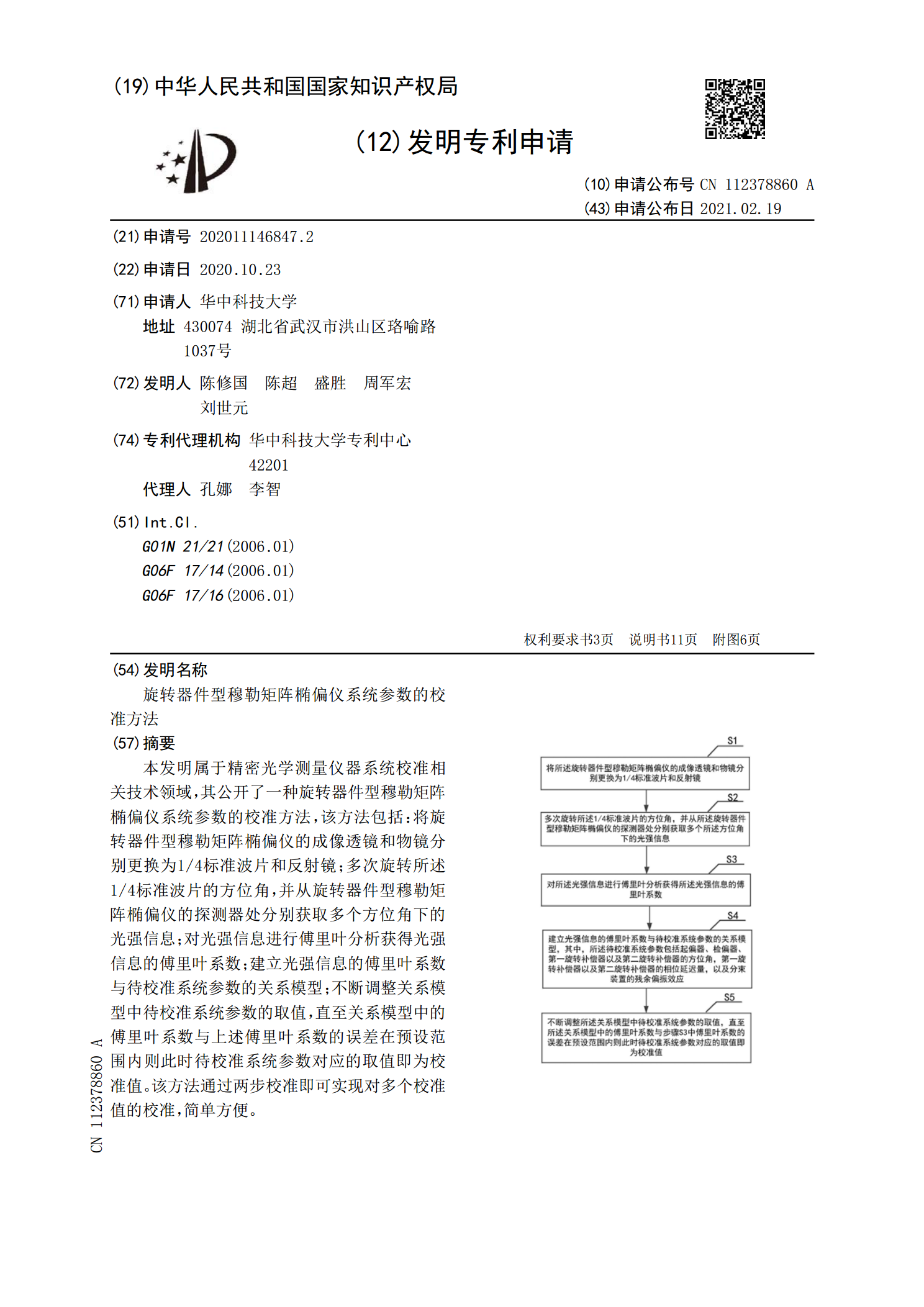
本发明属于精密光学测量仪器系统校准相关技术领域,其公开了一种旋转器件型穆勒矩阵椭偏仪系统参数的校准方法,该方法包括:将旋转器件型穆勒矩阵椭偏仪的成像透镜和物镜分别更换为1/4标准波片和反射镜;多次旋转所述1/4标准波片的方位角,并从旋转器件型穆勒矩阵椭偏仪的探测器处分别获取多个方位角下的光强信息;对光强信息进行傅里叶分析获得光强信息的傅里叶系数;建立光强信息的傅里叶系数与待校准系统参数的关系模型;不断调整关系模型中待校准系统参数的取值,直至关系模型中的傅里叶系数与上述傅里叶系数的误差在预设范围内则此时待校

穆勒矩阵成像椭偏仪误差源的简化分析方法.pptx
穆勒矩阵成像椭偏仪误差源的简化分析方法目录添加章节标题误差源的分类穆勒矩阵成像椭偏仪误差源的分类分类依据和标准各类误差源的特点和影响误差源的简化分析方法简化分析方法的提出分析方法的原理和步骤简化分析方法的优势和应用范围误差源的测量和评估测量误差源的方法和工具测量步骤和注意事项误差源的评估标准和结果分析误差源的减小和补偿减小误差源的方法和措施误差补偿的方法和原理补偿效果的评估和优化误差源对成像质量的影响误差源对成像质量的影响方式和程度成像质量的评估标准和测试方法提高成像质量的措施和建议结论和建议对简化分析方

一种自校准的全穆勒矩阵椭偏仪测量系统.pdf
本发明公开了一种自校准的全穆勒矩阵椭偏仪测量系统,属于光学测量仪器技术领域。其包括光源、起偏器、第一相位补偿器、检偏器、第二相位补偿器、光谱仪、样品台和各向同性且均匀的参考样品,各向同性且均匀的参考样品能够置于样品台上,还包括光谱仪数据采集频率设定模块、光强数据采集模块、实验傅里叶系数运算模块、理论傅里叶系数运算模块、第一相位补偿器相位延迟量运算模块、第二相位补偿器相位延迟量运算模块和全穆勒矩阵椭偏仪剩余工作参数运算模块。应用该自校准的全穆勒矩阵椭偏仪测量系统对待测样品进行测量时,测量结果更加准确。