
一种水下机器人用防撞装置.pdf

玉军****la


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下机器人用防撞装置.pdf
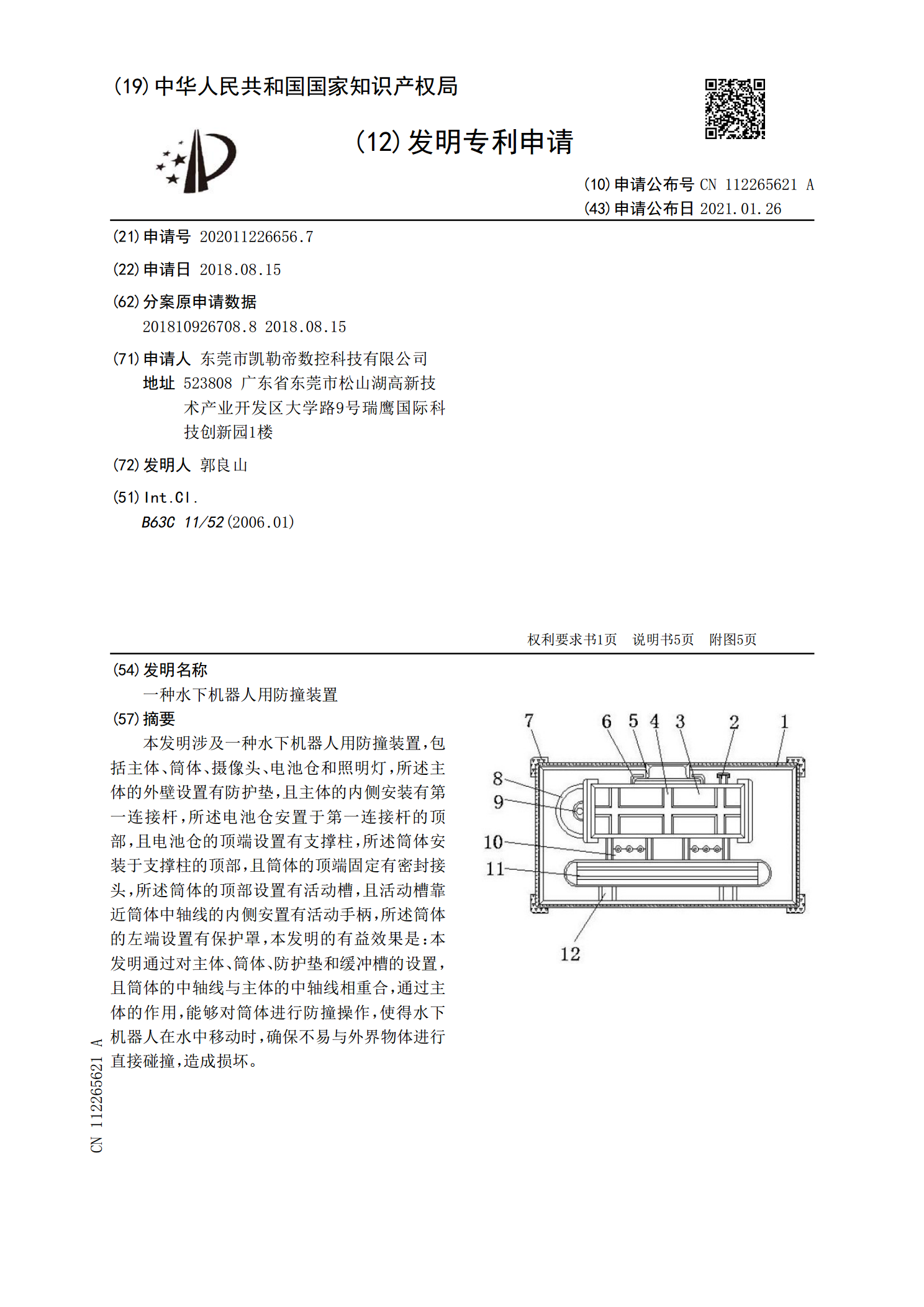
本发明涉及一种水下机器人用防撞装置,包括主体、筒体、摄像头、电池仓和照明灯,所述主体的外壁设置有防护垫,且主体的内侧安装有第一连接杆,所述电池仓安置于第一连接杆的顶部,且电池仓的顶端设置有支撑柱,所述筒体安装于支撑柱的顶部,且筒体的顶端固定有密封接头,所述筒体的顶部设置有活动槽,且活动槽靠近筒体中轴线的内侧安置有活动手柄,所述筒体的左端设置有保护罩,本发明的有益效果是:本发明通过对主体、筒体、防护垫和缓冲槽的设置,且筒体的中轴线与主体的中轴线相重合,通过主体的作用,能够对筒体进行防撞操作,使得水下机器人在

一种水下机器人用便于防撞装置.pdf
本发明涉及一种水下机器人用便于防撞装置,包括主体、筒体、摄像头、电池仓和照明灯,所述主体的外壁设置有防护垫,且主体的内侧安装有第一连接杆,所述电池仓安置于第一连接杆的顶部,且电池仓的顶端设置有支撑柱,所述筒体安装于支撑柱的顶部,且筒体的顶端固定有密封接头,所述筒体的顶部设置有活动槽,且活动槽靠近筒体中轴线的内侧安置有活动手柄,所述筒体的左端设置有保护罩,本发明的有益效果是:本发明通过对主体、筒体、防护垫和缓冲槽的设置,且筒体的中轴线与主体的中轴线相重合,通过主体的作用,能够对筒体进行防撞操作,使得水下机器
一种水下机器人用推进装置.pdf
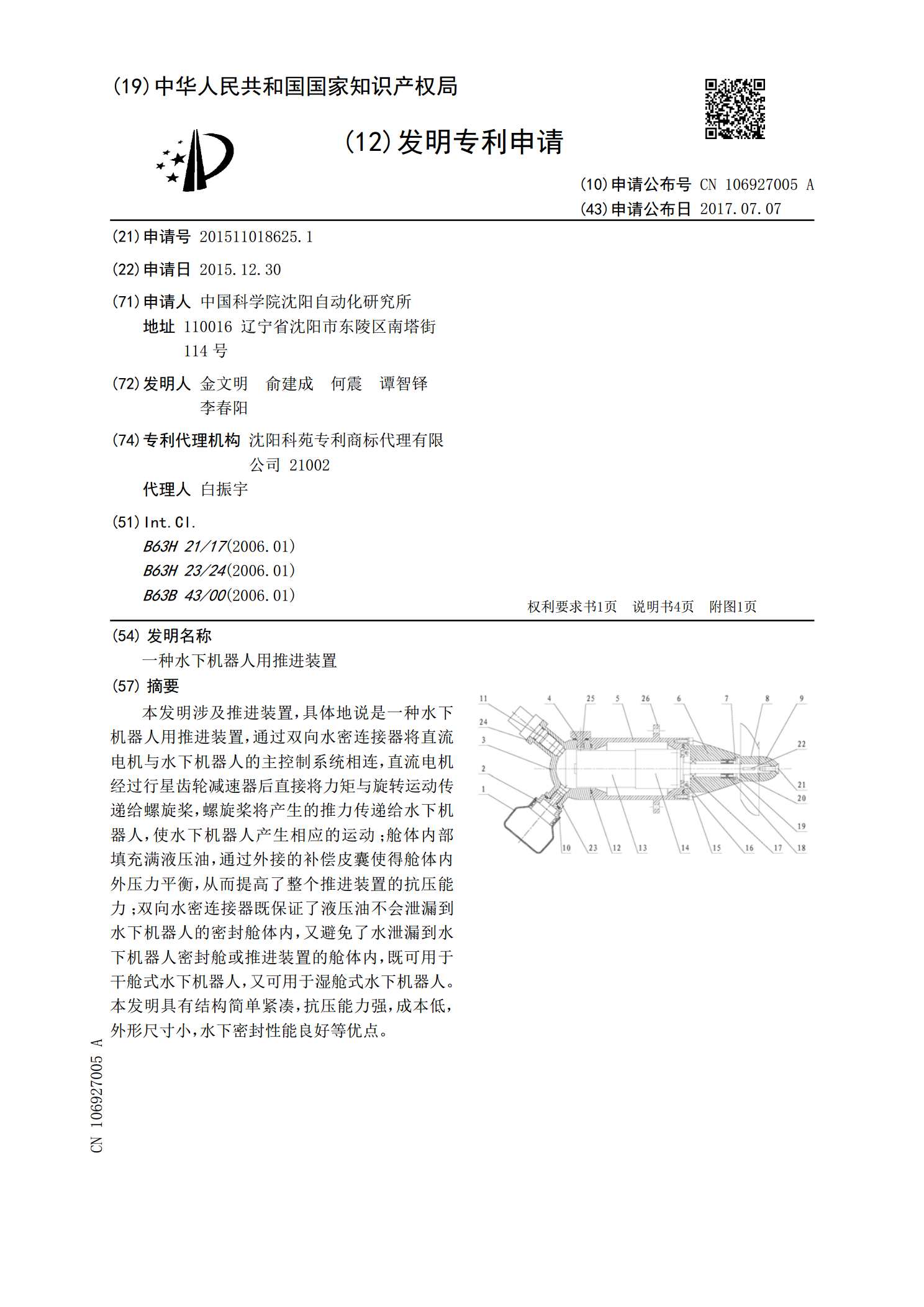
本发明涉及推进装置,具体地说是一种水下机器人用推进装置,通过双向水密连接器将直流电机与水下机器人的主控制系统相连,直流电机经过行星齿轮减速器后直接将力矩与旋转运动传递给螺旋桨,螺旋桨将产生的推力传递给水下机器人,使水下机器人产生相应的运动;舱体内部填充满液压油,通过外接的补偿皮囊使得舱体内外压力平衡,从而提高了整个推进装置的抗压能力;双向水密连接器既保证了液压油不会泄漏到水下机器人的密封舱体内,又避免了水泄漏到水下机器人密封舱或推进装置的舱体内,既可用于干舱式水下机器人,又可用于湿舱式水下机器人。本发明具

一种水下机器人用压坠装置.pdf
本发明属于水下机器人技术领域,特别涉及一种水下机器人用压坠装置。包括承载框架及设置于承载框架上的供电系统、释放器、控制舱、光纤管理系统、水面通讯系统及光学探测系统;释放器设置于承载框架的底部,用于与水下机器人连接;光纤管理系统用于光纤的管理和切断;水面通讯系统用于与水下机器人及水面母船进行通讯;光学探测系统用于水下光纤进行实时监测;控制舱用于控制释放器和光纤管理系统;供电系统用于为设置于承载框架上的设备进行供电。本发明可深入水下3000米级,以减少水面及浅水层的洋流对光纤的影响,避免光纤微缆受到过大的拉力
一种水下机器人用质心调节装置.pdf
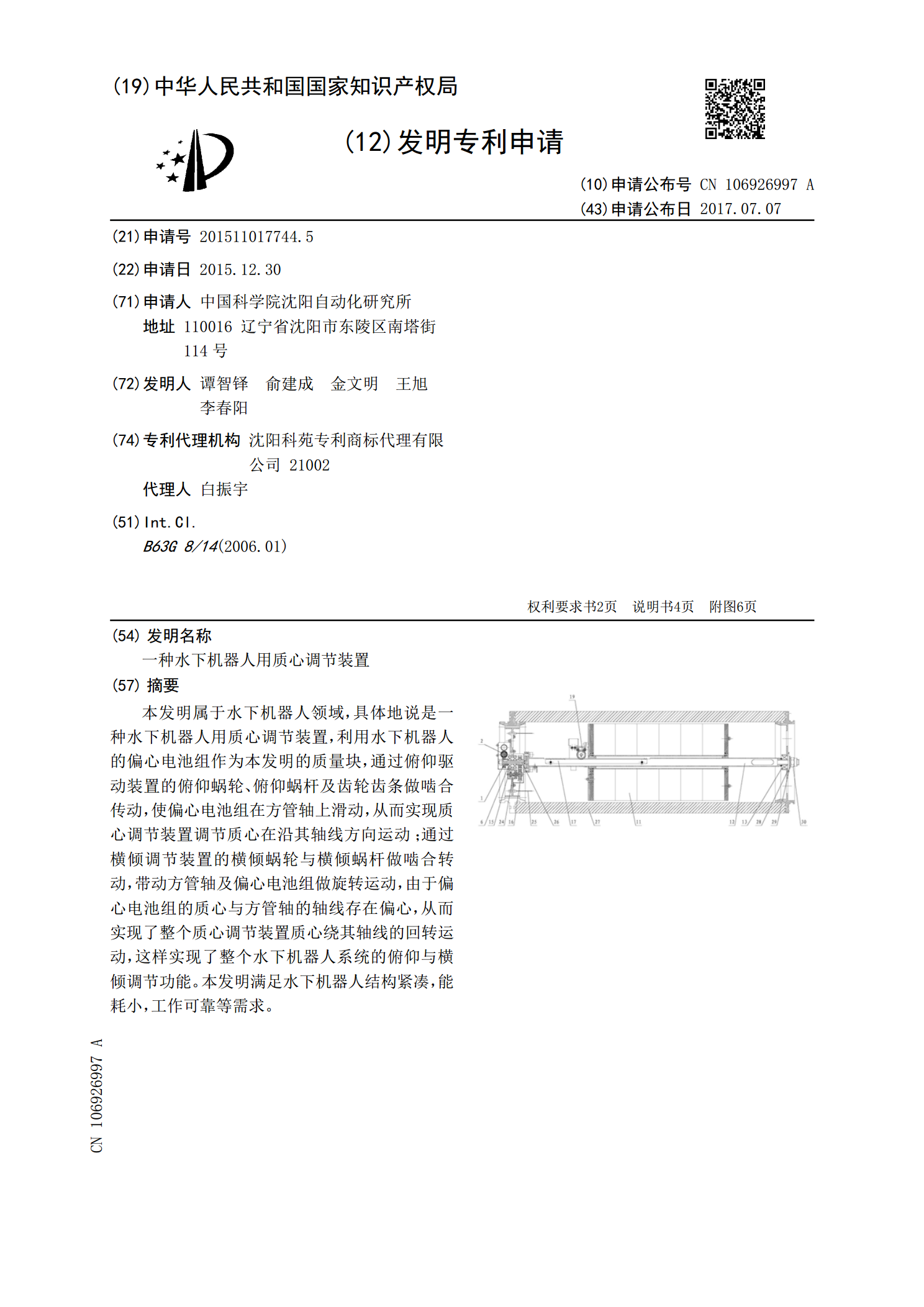
本发明属于水下机器人领域,具体地说是一种水下机器人用质心调节装置,利用水下机器人的偏心电池组作为本发明的质量块,通过俯仰驱动装置的俯仰蜗轮、俯仰蜗杆及齿轮齿条做啮合传动,使偏心电池组在方管轴上滑动,从而实现质心调节装置调节质心在沿其轴线方向运动;通过横倾调节装置的横倾蜗轮与横倾蜗杆做啮合转动,带动方管轴及偏心电池组做旋转运动,由于偏心电池组的质心与方管轴的轴线存在偏心,从而实现了整个质心调节装置质心绕其轴线的回转运动,这样实现了整个水下机器人系统的俯仰与横倾调节功能。本发明满足水下机器人结构紧凑,能耗小,