
一种车载导航系统的导航方法.pdf

宛菡****魔王


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载导航系统的导航方法.pdf
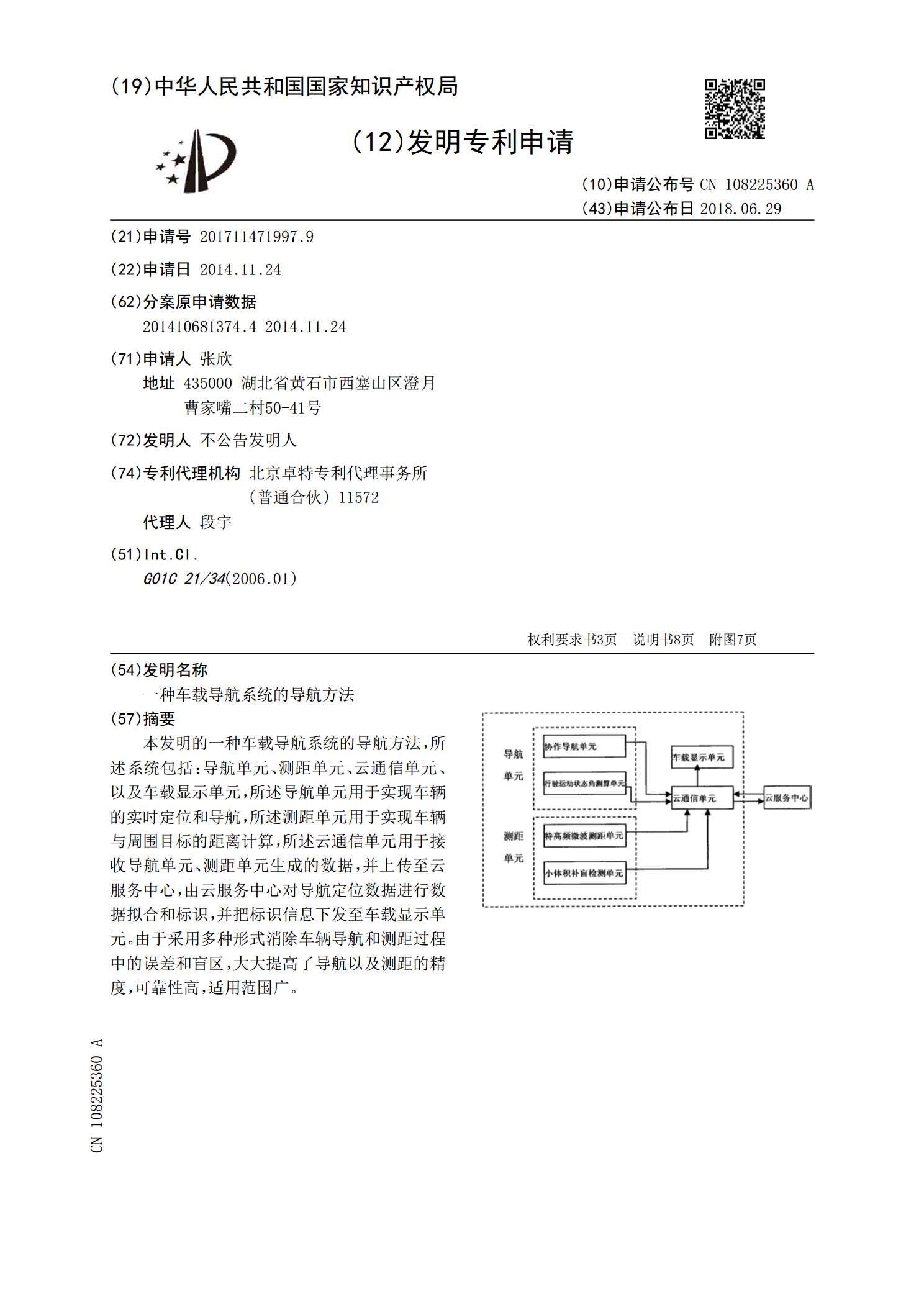
本发明的一种车载导航系统的导航方法,所述系统包括:导航单元、测距单元、云通信单元、以及车载显示单元,所述导航单元用于实现车辆的实时定位和导航,所述测距单元用于实现车辆与周围目标的距离计算,所述云通信单元用于接收导航单元、测距单元生成的数据,并上传至云服务中心,由云服务中心对导航定位数据进行数据拟合和标识,并把标识信息下发至车载显示单元。由于采用多种形式消除车辆导航和测距过程中的误差和盲区,大大提高了导航以及测距的精度,可靠性高,适用范围广。
车载导航系统及方法.pdf
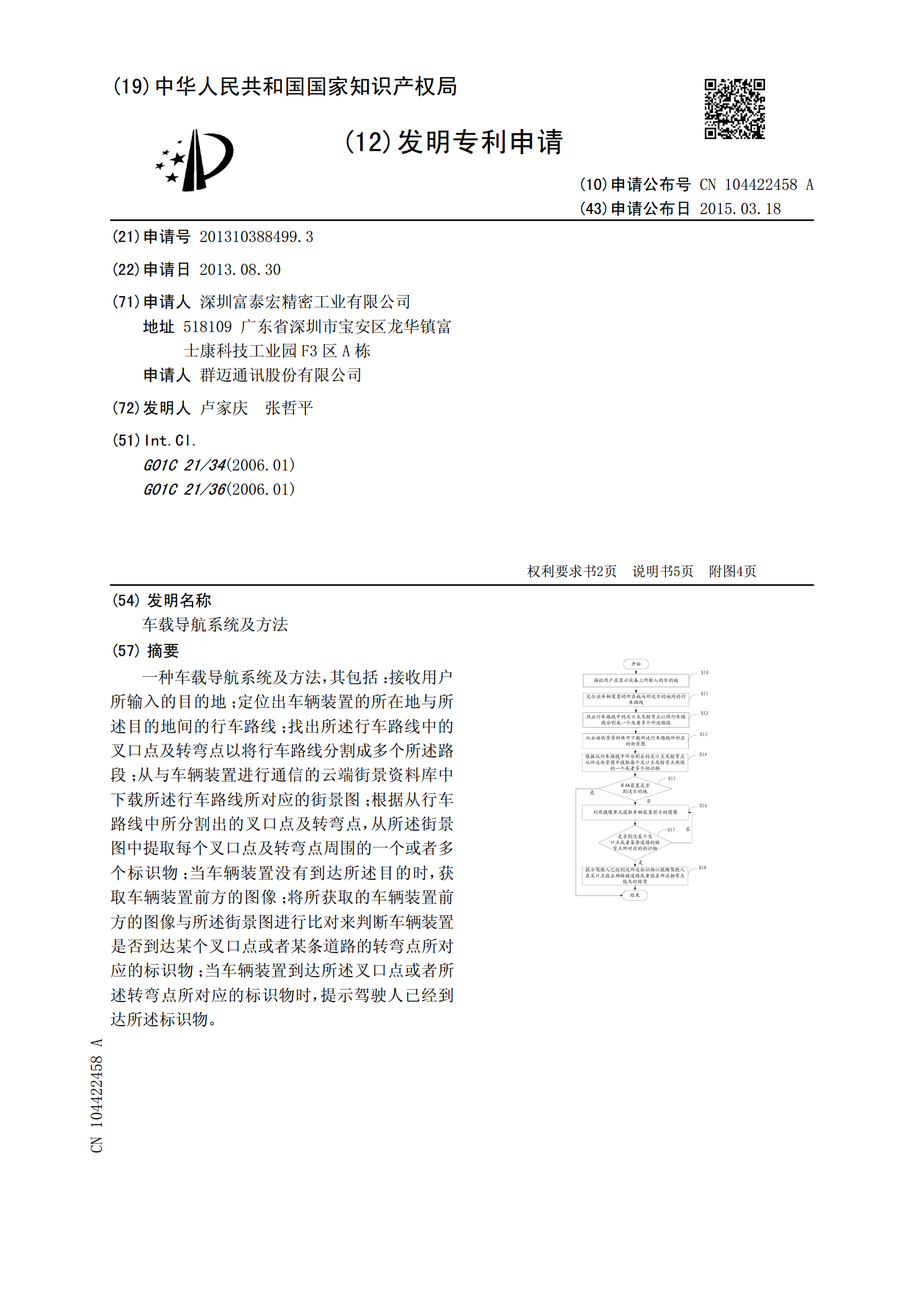
一种车载导航系统及方法,其包括:接收用户所输入的目的地;定位出车辆装置的所在地与所述目的地间的行车路线;找出所述行车路线中的叉口点及转弯点以将行车路线分割成多个所述路段;从与车辆装置进行通信的云端街景资料库中下载所述行车路线所对应的街景图;根据从行车路线中所分割出的叉口点及转弯点,从所述街景图中提取每个叉口点及转弯点周围的一个或者多个标识物;当车辆装置没有到达所述目的时,获取车辆装置前方的图像;将所获取的车辆装置前方的图像与所述街景图进行比对来判断车辆装置是否到达某个叉口点或者某条道路的转弯点所对应的标识

一种车载导航仪及导航方法、导航系统.pdf
本发明的实施例公开一种车载导航仪及导航方法、导航系统,涉及车辆技术领域,能够向驾驶员推荐最合适的加油站,避免时间的浪费提高用户体验。该导航方法包括:从服务器获取车辆的加油卡对应的油编号;获取剩余油量能够到达的各个目标加油站,目标加油站包含油编号对应的油品;获取车辆当前位置到达各个目标加油站的第一行驶距离,以及第一车速;获取从各个目标加油站到达车辆行驶目的地的第二行驶距离,以及第二车速;获取各个目标加油站的平均加油时间;计算车辆由当前位置经由各个目标加油站到达目的地的全程行驶时间;将全程行驶时间最小的目标加

车载导航系统以及车辆的导航方法.pdf
本发明涉及一种车载导航系统以及车辆的导航方法。车载导航系统是能够与中心服务器通信的车载导航系统,包括:当前位置取得部,取得车辆所处的当前位置;接收部,接收来自中心服务器的限行信息;存储部,预先存储有车辆的车辆信息;处理部,比较限行信息与车辆信息,并基于比较结果更新车辆的从当前位置到目的地的行驶路线,从而对车辆进行导航。

一种车载导航系统.pdf
本发明公开了一种车载导航系统,所述车载导航系统包括:GPS模块、无线通信模块、报警控制模块、音控制模块、显示模块、整合处理各功能模块、电子地图模块、自律导航模块、地图匹配模块;为车辆的导航以及安全提供了更加全面的保障,通过摄像头将地址信息传输至车载导航仪,降低了对车载导航仪和无线终端驱动兼容性的要求,提高了用户体验;可以在完成汽车导航和汽车娱乐的同时,通过3G网关的给车上的其他人提供WiFi上网。