
一种目标定位方法、装置、GMTI系统及可读存储介质.pdf

Th****84

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种目标定位方法、装置、GMTI系统及可读存储介质.pdf
本发明公开了一种目标定位方法、装置、GMTI系统及可读存储介质,其中方法包括:通过抑制锐化比确定不同多普勒通道的目标干涉相位;根据所述目标干涉相位确定目标方位角;基于所述目标方位角完成定位。本发明方法通过定义的抑制锐化比确定不同多普勒通道的目标干涉相位,由此可以实现根据目标干涉相位实现目标定位,提高了目标定位精度。
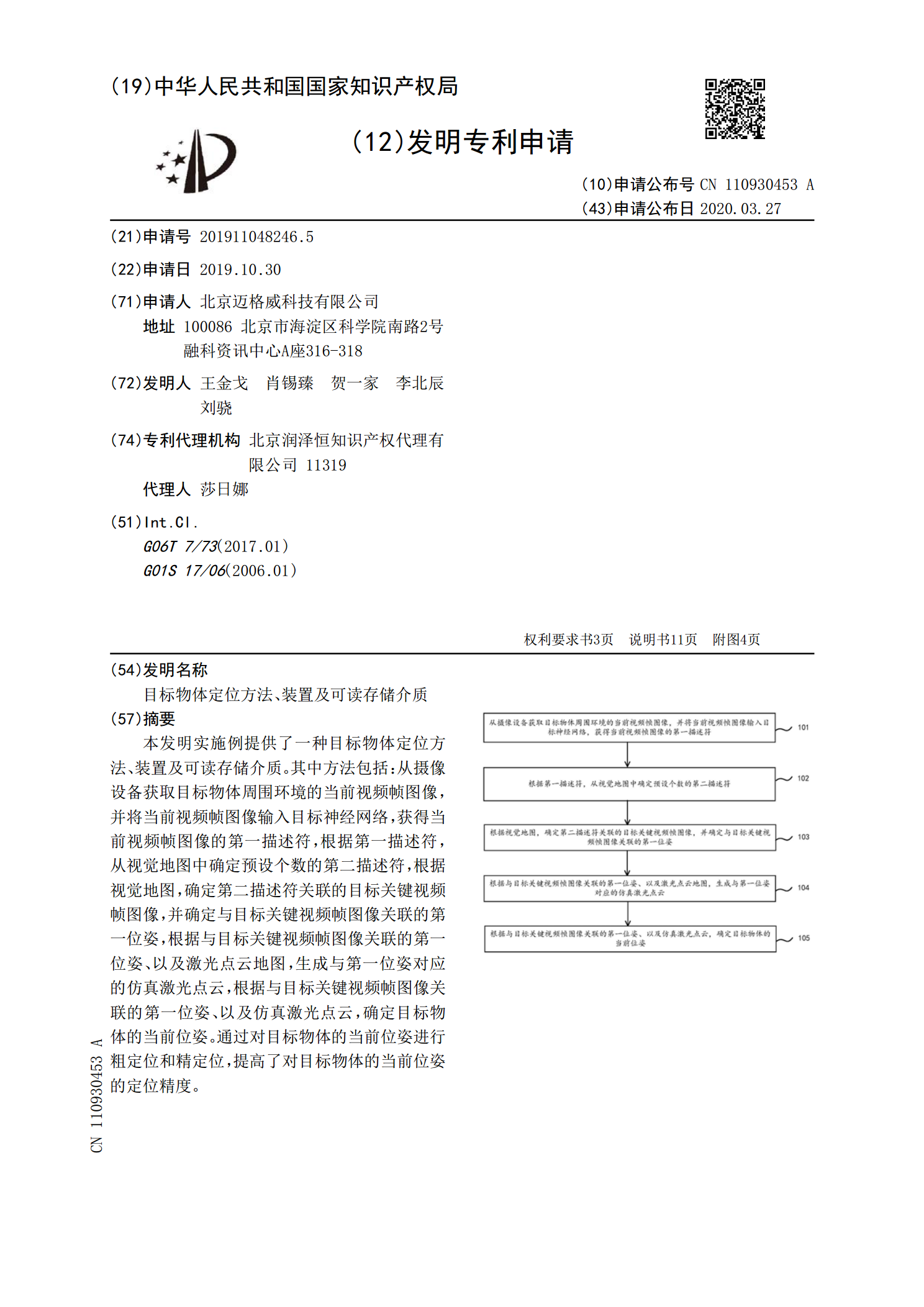
目标物体定位方法、装置及可读存储介质.pdf
本发明实施例提供了一种目标物体定位方法、装置及可读存储介质。其中方法包括:从摄像设备获取目标物体周围环境的当前视频帧图像,并将当前视频帧图像输入目标神经网络,获得当前视频帧图像的第一描述符,根据第一描述符,从视觉地图中确定预设个数的第二描述符,根据视觉地图,确定第二描述符关联的目标关键视频帧图像,并确定与目标关键视频帧图像关联的第一位姿,根据与目标关键视频帧图像关联的第一位姿、以及激光点云地图,生成与第一位姿对应的仿真激光点云,根据与目标关键视频帧图像关联的第一位姿、以及仿真激光点云,确定目标物体的当前位

一种运动系统的定位方法、系统、装置及可读存储介质.pdf
本发明公开了一种运动系统的定位方法,包括:控制运动系统按第一速度旋转;当检测到霍尔开关的反馈信号时,控制运动系统按第二速度逆向旋转,直至运动系统到达霍尔开关的中心区域,其中,第一速度大于第二速度;通过霍尔开关控制运动系统执行预设操作。本发明先控制运动系统按第一速度快速旋转,以提高定位速度,在接收到霍尔开关的反馈信号后,控制运动系统按第二速度慢速逆向旋转,直至停在霍尔开关的中心区域内,以提高稳定性,进而提高了娱乐设施的经济效益。本发明还公开了一种运动系统的定位系统、装置及可读存储介质,具有上述有益效果。

直播间AR定位的方法、装置、系统及可读存储介质.pdf
本发明公开了一种直播间AR定位的方法,包括:获取客户端的实时位置;判断连续两次获取的所述客户端的实时位置之间的距离是否大于距离阈值;如果所述距离大于所述距离阈值,判断所述距离大于所述距离阈值的累计出现次数是否大于累计阈值;如果所述累计出现次数大于所述累计阈值,则将定位不准的提示信息发送至客户端。该方法能够在直播间增强AR定位,增强直播间的娱乐性;本发明还公开了一种直播间AR定位的装置、系统及可读存储介质,具有上述有益效果。
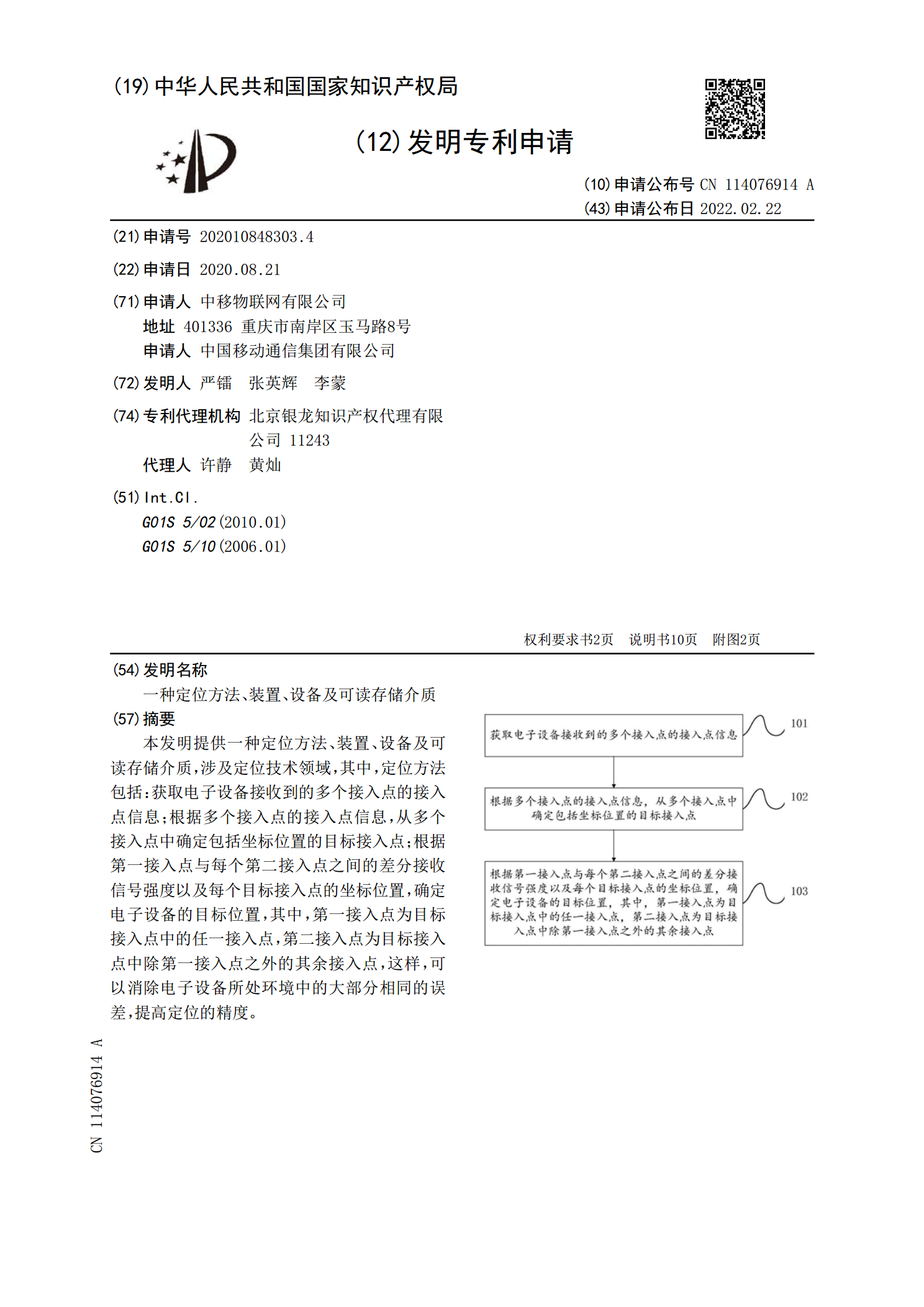
一种定位方法、装置、设备及可读存储介质.pdf
本发明提供一种定位方法、装置、设备及可读存储介质,涉及定位技术领域,其中,定位方法包括:获取电子设备接收到的多个接入点的接入点信息;根据多个接入点的接入点信息,从多个接入点中确定包括坐标位置的目标接入点;根据第一接入点与每个第二接入点之间的差分接收信号强度以及每个目标接入点的坐标位置,确定电子设备的目标位置,其中,第一接入点为目标接入点中的任一接入点,第二接入点为目标接入点中除第一接入点之外的其余接入点,这样,可以消除电子设备所处环境中的大部分相同的误差,提高定位的精度。