
一种线结构光条纹中心提取方法.pdf

春岚****23


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种线结构光条纹中心提取方法.pdf
本发明涉及机器视觉技术领域领域,公开了一种线结构光条纹中心提取方法,本申请中Steger算法利用Hessian矩阵得到条纹的法线方向并对结构光条纹横截面上的灰度分布函数进行二阶泰勒展开得到亚像素中心,能达到亚像素的提取精度,但计算复杂度高,很难满足工业实时检测的要求,所以要求能在保证精度的同时简化计算步骤达到实时检测的目的,灰度重心法容易受到噪声的干扰,适用性不强。所以需要从精度、实时性和适用性三方面来设计条纹中心的提取方法。

一种结构光条纹图像的条纹中心提取方法.pdf
本发明属于机器视觉技术领域,具体涉及一种结构光条纹图像的条纹中心提取方法,S1、对于一幅结构光条纹图像,取每一列进行条纹中心计算得到一个中心坐标点,列坐标为当前列号,行坐标为计算所得的灰度中心,所述灰度中心是指以像素灰度为权重,计算相连像素集合中的行坐标中心,假设图像有m列,则最终计算得到m个条纹中心坐标;S2、设置一灰度阈值,对于常见的灰度图像,灰度阈值取值0到255之间的整数,对于每一列像素,统计该列中相连的且灰度值大于等于灰度阈值的像素,形成若干个像素集合,保留其中灰度值之和最大的像素集合,其余剔除

一种线结构光中心线提取方法及存储介质.pdf
本发明请求保护一种线结构光中心线提取方法,本发明属于机器视觉技术领域,包括:对CCD工业相机采集到的图像进行剪裁、图像灰度化、图像增强、图像去噪、图像二值化、形态学开闭运算和图像光条区域分割等一系列的处理;采用细化算法进行细化处理,得到包含单像素光条中心线的图像;对Steger算法进行了改进。首先确定感兴趣区域,对该区域进行中值滤波;其次按照已确定的约束阈值和1×5的可行动模板在图像行上移动,找出粗略的中心点;然后通过高斯函数的可分离性及对称性求出Hessian矩阵;最后用泰勒二次展开得到亚像素级中心坐标
一种基于切比雪夫矩的激光条纹中心线提取方法.pdf
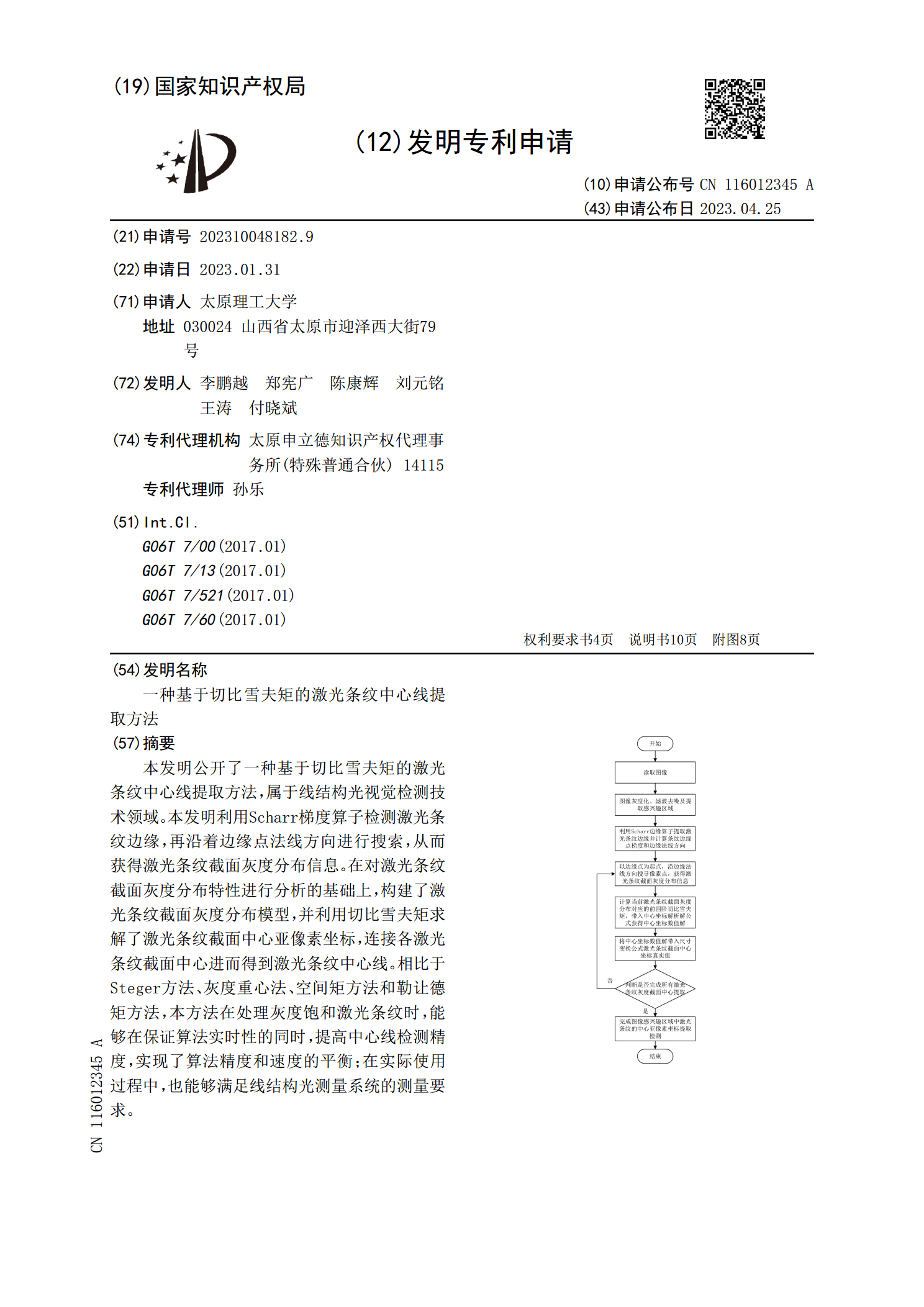
本发明公开了一种基于切比雪夫矩的激光条纹中心线提取方法,属于线结构光视觉检测技术领域。本发明利用Scharr梯度算子检测激光条纹边缘,再沿着边缘点法线方向进行搜索,从而获得激光条纹截面灰度分布信息。在对激光条纹截面灰度分布特性进行分析的基础上,构建了激光条纹截面灰度分布模型,并利用切比雪夫矩求解了激光条纹截面中心亚像素坐标,连接各激光条纹截面中心进而得到激光条纹中心线。相比于Steger方法、灰度重心法、空间矩方法和勒让德矩方法,本方法在处理灰度饱和激光条纹时,能够在保证算法实时性的同时,提高中心线检测精

一种基于决策的激光条纹的中心提取方法.pdf
本发明公开一种基于决策的激光条纹的中心提取方法,将提取中心线条的问题转化为一个类似于走迷宫问题,即从起点出发,对于只考虑四连通来说,只有四个方向可供选择,即上、下、左、右,然后根据决策手段,决定下一个像素点去往哪个方向;之后以所述的下一个像素点为新的决策点,再次判断又一个像素点的位置,即此时只有三种选择,因为不可能再往回走;依此方法逐步迭代,每一个像素点都要经过一个决策确定下一个位置,直到走到图像的尽头或者条纹的尽头算法结束;那么所有走过的点组成的集合就是所提取的条纹中心;本发明方法可同时兼顾速度和准确率