
一种基于切比雪夫矩的激光条纹中心线提取方法.pdf

一只****生物

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于切比雪夫矩的激光条纹中心线提取方法.pdf
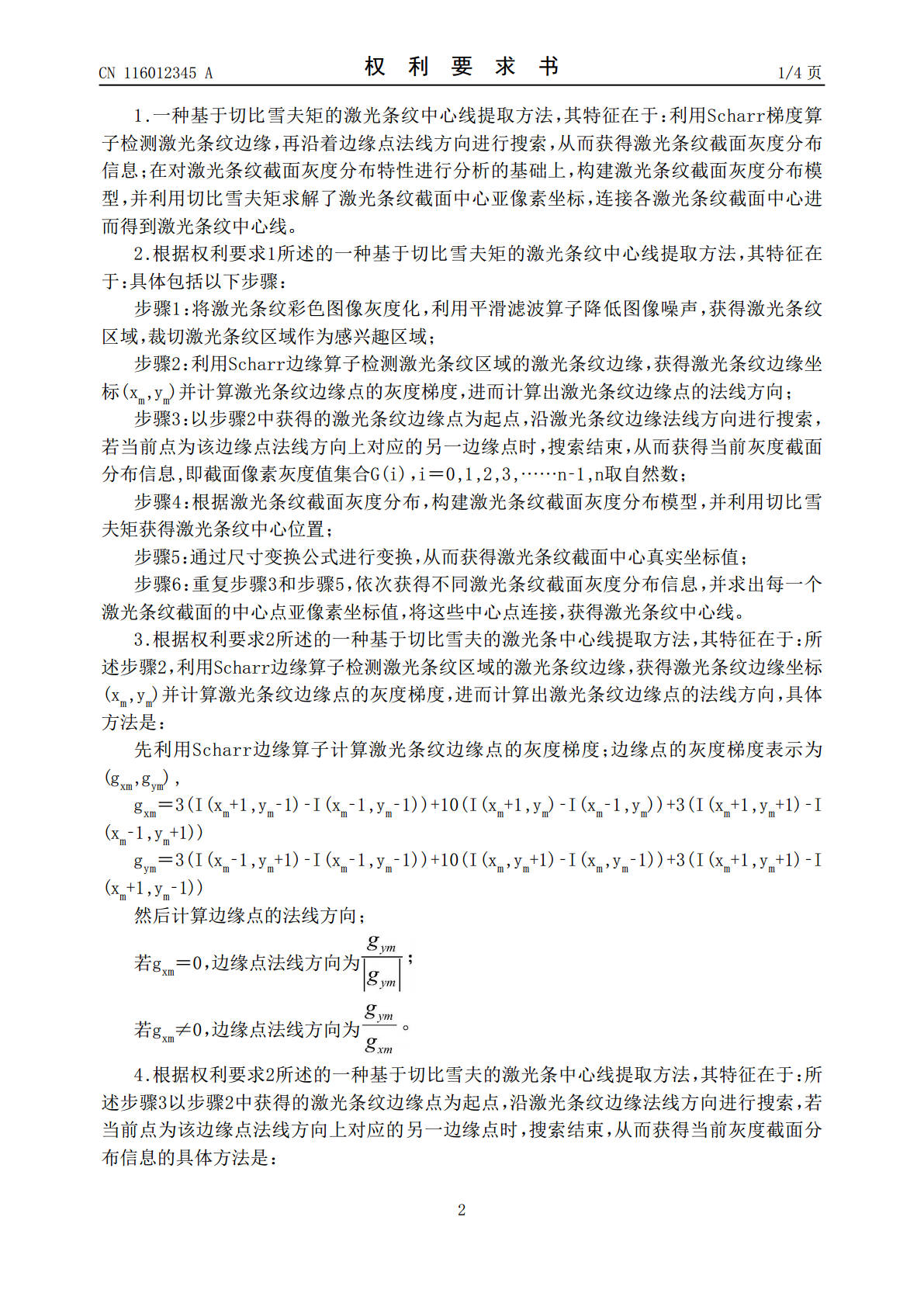
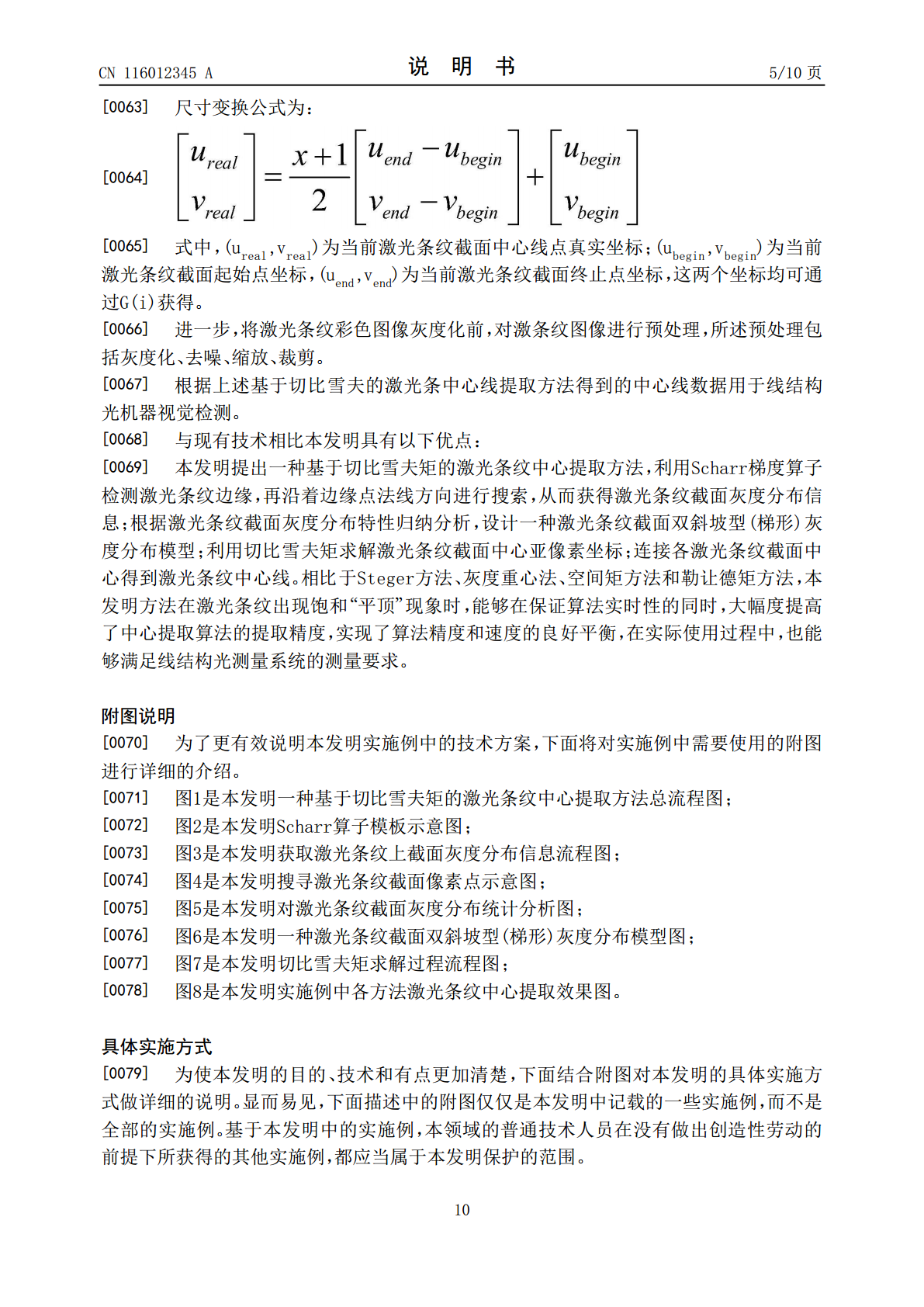
本发明公开了一种基于切比雪夫矩的激光条纹中心线提取方法,属于线结构光视觉检测技术领域。本发明利用Scharr梯度算子检测激光条纹边缘,再沿着边缘点法线方向进行搜索,从而获得激光条纹截面灰度分布信息。在对激光条纹截面灰度分布特性进行分析的基础上,构建了激光条纹截面灰度分布模型,并利用切比雪夫矩求解了激光条纹截面中心亚像素坐标,连接各激光条纹截面中心进而得到激光条纹中心线。相比于Steger方法、灰度重心法、空间矩方法和勒让德矩方法,本方法在处理灰度饱和激光条纹时,能够在保证算法实时性的同时,提高中心线检测精

基于切比雪夫傅里叶矩的复杂Logo图案特征提取方法.pdf
本发明公开了一种基于切比雪夫傅里叶矩的复杂Logo图案特征提取方法,提取复杂Logo图案外轮廓,寻找所述复杂Logo图案的外轮廓的最小外接覆盖圆,使用双线性插值方法依次对所述最小外接覆盖圆内的各个像素进行拉伸或缩小变换,用切比雪夫傅里叶矩提取变换后的复杂Logo图案特征。通过上述方法的结合从技术角度上能够有效提高复杂Logo图案在自然场景中自动识别的准确率,为用户在观看视频节目时提供个性化的智能推送服务,为商家宣传自家产品进行智能化营销提供了可行方便且新颖的技术方案。

一种基于决策的激光条纹的中心提取方法.pdf
本发明公开一种基于决策的激光条纹的中心提取方法,将提取中心线条的问题转化为一个类似于走迷宫问题,即从起点出发,对于只考虑四连通来说,只有四个方向可供选择,即上、下、左、右,然后根据决策手段,决定下一个像素点去往哪个方向;之后以所述的下一个像素点为新的决策点,再次判断又一个像素点的位置,即此时只有三种选择,因为不可能再往回走;依此方法逐步迭代,每一个像素点都要经过一个决策确定下一个位置,直到走到图像的尽头或者条纹的尽头算法结束;那么所有走过的点组成的集合就是所提取的条纹中心;本发明方法可同时兼顾速度和准确率

一种基于Zhang-Suen图像骨架提取的干涉条纹中心线拟合方法.pdf
本发明公开一种基于Zhang‑Suen图像骨架提取的干涉条纹中心线拟合方法,包括:S1:将包含干涉条纹的图像转换成灰度图;S2:对灰度图进行预处理,得到二值图像;S3:扫描二值图像的所有像素,对每一个扫描到的像素构造邻域像素模板;S4:利用Zhang‑Suen图像骨架提取方法和邻域像素的条件判别方法对扫描到的邻域像素模板进行条件判决,在保留干涉条纹的骨架信息的前提下,删除干涉条纹边缘的冗余像素点,反复迭代后,得到干涉条纹的中心线。本发明使用了并行运算的方法,减少了冗余的判别条件,只使用邻域像素点的和对条纹
一种焊缝跟踪激光中心线提取方法.pdf
本发明公开了一种焊缝跟踪激光中心线提取方法,包括步骤:(1)获取初始激光中心线位置,采样选取若干节点拟合非均匀有理B样条曲线并定义为主动轮廓模型的内部能量;(2)采用高斯拉普拉斯LOG算子计算步骤(1)中每个节点附近的响应值并定义主动轮廓模型的外部能量;(3)采用贪心算法计算比较外部能量的响应值得到当前迭代的变换位置;(4)利用灰度重心法获取步骤(3)中新节点的亚像素精度位置;(5)对步骤(4)中获取的亚像素精度位置的新节点拟合成新的非均匀有理B样条曲线作为当前帧图像的激光中心线位置。本发明采用局部迭代方