
一种基于SIMO多普勒雷达的多目标动作识别方法.pdf

书生****写意

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于SIMO多普勒雷达的多目标动作识别方法.pdf
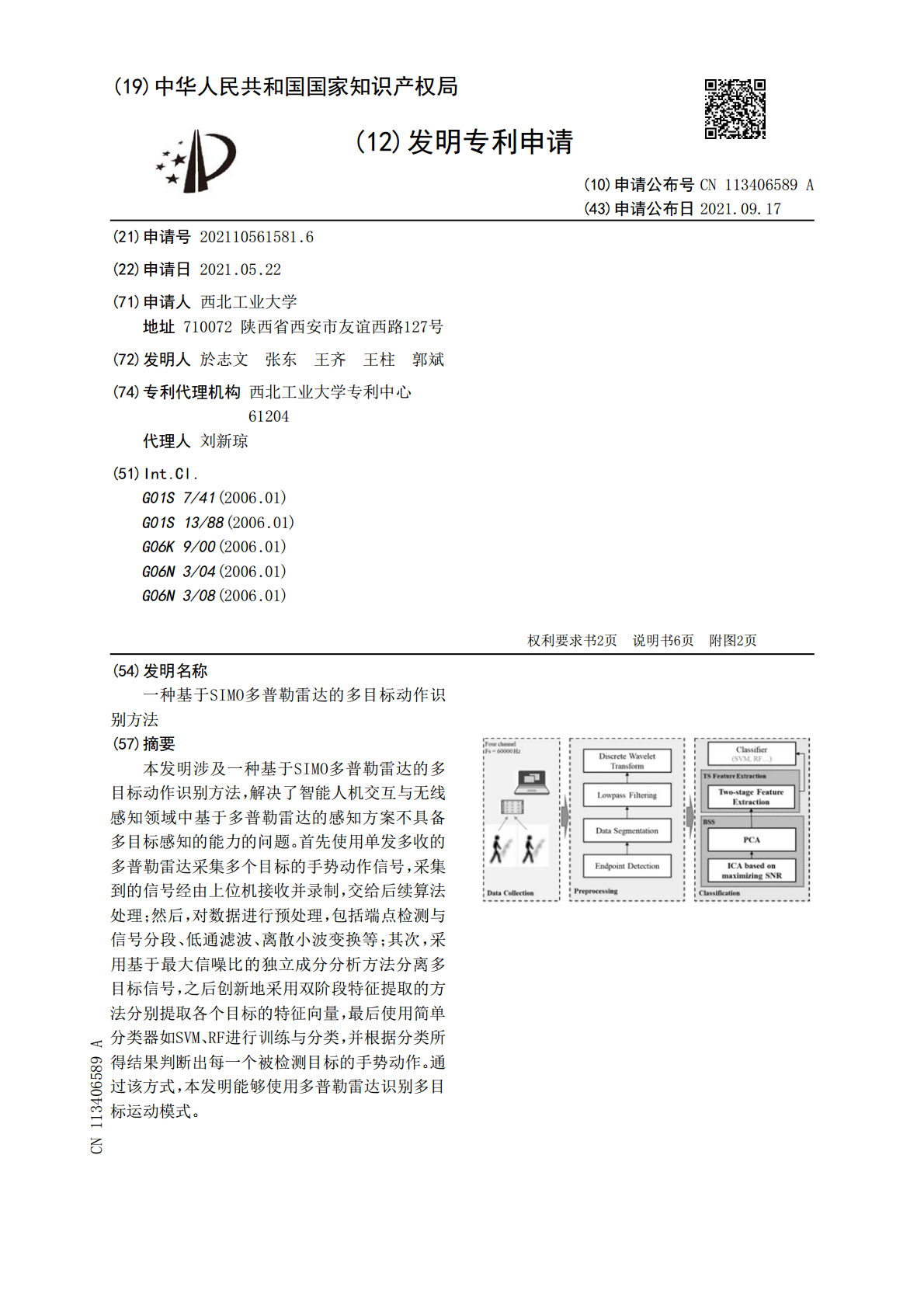
本发明涉及一种基于SIMO多普勒雷达的多目标动作识别方法,解决了智能人机交互与无线感知领域中基于多普勒雷达的感知方案不具备多目标感知的能力的问题。首先使用单发多收的多普勒雷达采集多个目标的手势动作信号,采集到的信号经由上位机接收并录制,交给后续算法处理;然后,对数据进行预处理,包括端点检测与信号分段、低通滤波、离散小波变换等;其次,采用基于最大信噪比的独立成分分析方法分离多目标信号,之后创新地采用双阶段特征提取的方法分别提取各个目标的特征向量,最后使用简单分类器如SVM、RF进行训练与分类,并根据分类所得

一种基于SIMO多普勒雷达的弱约束步态轨迹处理方法.pdf
本发明公开了一种基于SIMO多普勒雷达的弱约束步态轨迹处理方法,首先使用单发双收多普勒雷达采集受试者的步态数据,然后对数据进行预处理消除高频噪声对步态数据的影响;接下来里采用相关系数法计算接收到的两路信号的相位差,并计算受试者与雷达法线构成的夹角,即偏转角;接着根据多普勒效应计算受试目标朝向雷达设备的移动速度,并据此计算受试者在雷达设备法线方向上的移动距离;最后计算受试者在不同时间帧的运动方向,并将步态轨迹进行分割,得到多段运动方向与雷达设备法线方向解耦的直线步态轨迹。本发明在实现了对弱约束步态轨迹处理的
一种基于CW体制多普勒雷达的手势识别方法.pdf
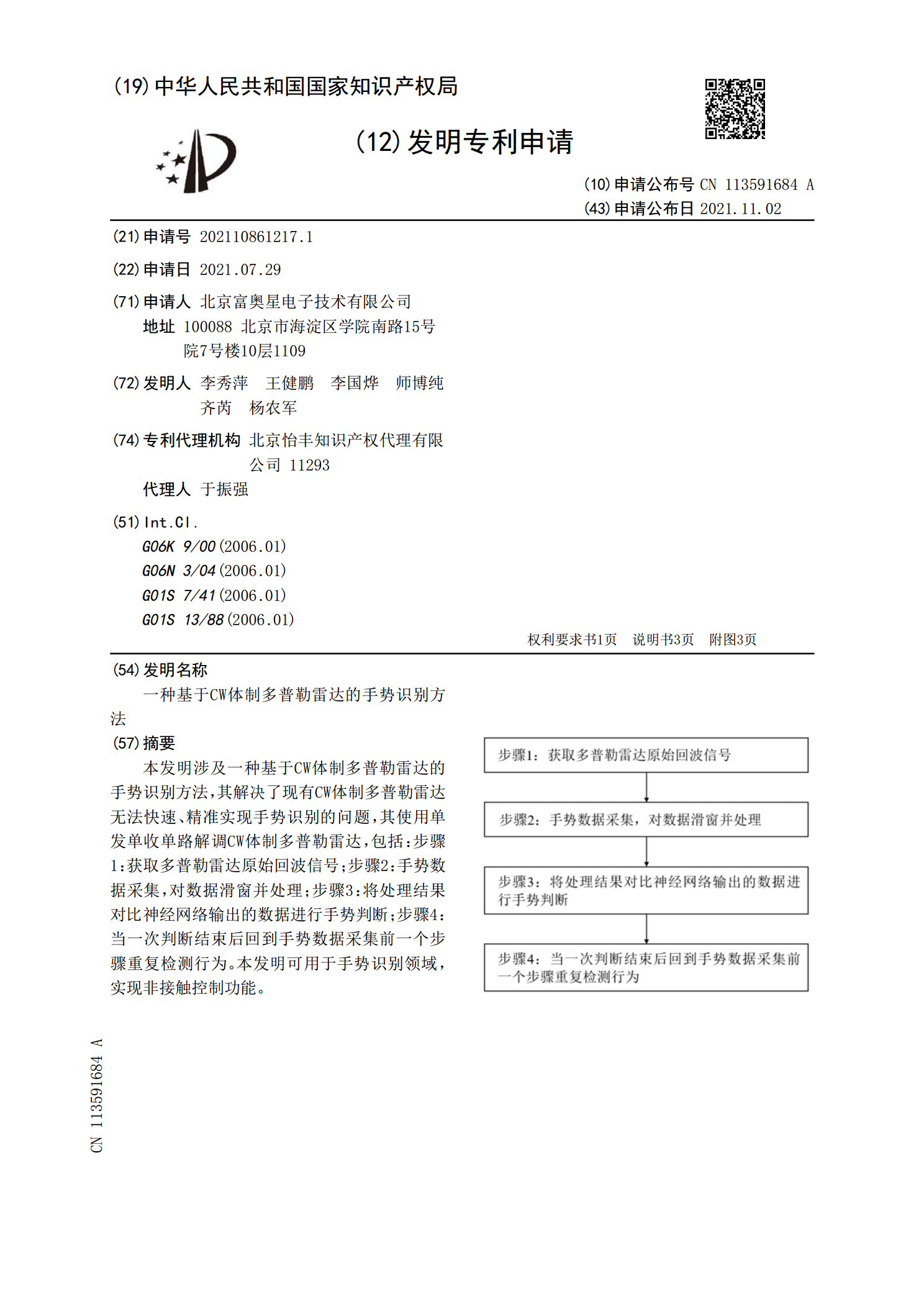
本发明涉及一种基于CW体制多普勒雷达的手势识别方法,其解决了现有CW体制多普勒雷达无法快速、精准实现手势识别的问题,其使用单发单收单路解调CW体制多普勒雷达,包括:步骤1:获取多普勒雷达原始回波信号;步骤2:手势数据采集,对数据滑窗并处理;步骤3:将处理结果对比神经网络输出的数据进行手势判断;步骤4:当一次判断结束后回到手势数据采集前一个步骤重复检测行为。本发明可用于手势识别领域,实现非接触控制功能。

基于时变距离-多普勒图的超宽带雷达动作识别方法.pdf
本发明公开了一种基于时变距离‑多普勒图的超宽带雷达动作识别方法,包括:(1)采集并对雷达信号进行杂波滤除处理;(2)根据杂波滤除后的雷达信号的时频分布特性判断动作是否发生,并截取动作发生的时间段;(3)根据动作发生的时间段构建时变距离‑多普勒图;(4)采用主成分分析方法或自编码器提取时变距离‑多普勒图的特征信息;(5)构建动作识别网络,其包括至少一个门控循环单元和softmax分类器,利用提取的特征信息以及对应的真值标签对动作识别网络进行训练,获得动作识别模型;(6)应用时,按照步骤(1)~(4)获得待识

一种多普勒雷达多目标检测方法.pdf
本发明公开了一种多普勒雷达多目标检测方法,涉及多普勒雷达目标检测技术领域。本发明包括以下步骤,时域数据,采集运动目标的回波信号数据或经处理的回波信号数据A;距离向FFT,对回波信号数据A进行加窗、距离向傅立叶变换得到频域数据矩阵B;多普勒向FFT,对频域矩阵数据B进行多普勒滤波,并求模,得到多普勒谱C;取模,针对多普勒谱C数据,在同一距离向上的非零多普勒频率幅值进行累加,得到数列D;累加,设定基础阈值h,数列D中小于h的数据全部置零,得到新的数列E。本发明通过设计的多普勒雷达多目标检测方法解决了现有多普勒