
一种基于CW体制多普勒雷达的手势识别方法.pdf

海昌****姐淑


1/8

2/8

3/8
4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于CW体制多普勒雷达的手势识别方法.pdf
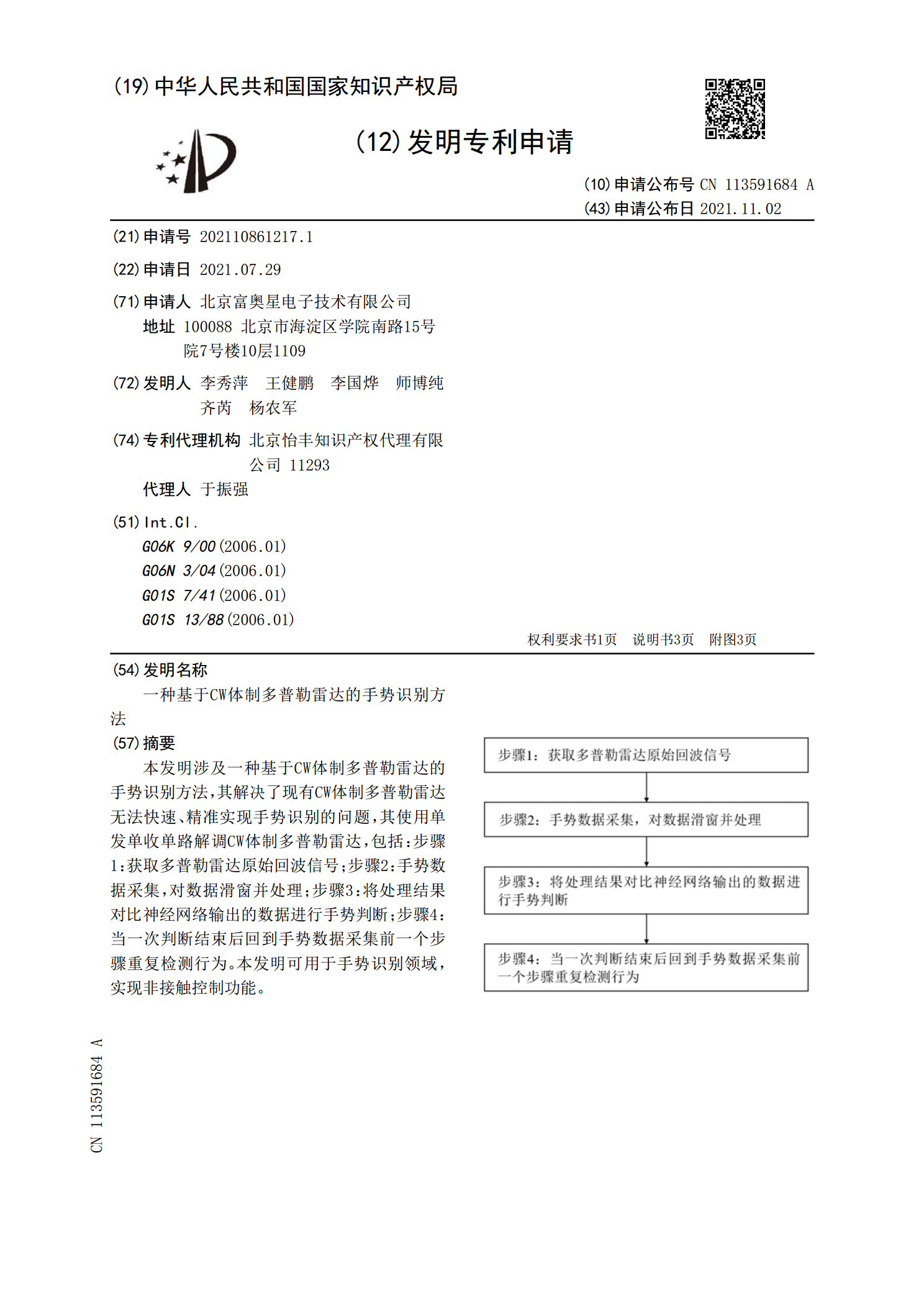
本发明涉及一种基于CW体制多普勒雷达的手势识别方法,其解决了现有CW体制多普勒雷达无法快速、精准实现手势识别的问题,其使用单发单收单路解调CW体制多普勒雷达,包括:步骤1:获取多普勒雷达原始回波信号;步骤2:手势数据采集,对数据滑窗并处理;步骤3:将处理结果对比神经网络输出的数据进行手势判断;步骤4:当一次判断结束后回到手势数据采集前一个步骤重复检测行为。本发明可用于手势识别领域,实现非接触控制功能。

一种基于微多普勒特征的手势识别方法及系统.pdf
本发明涉及一种基于微多普勒特征的手势识别方法及系统,方法包括:采用穿墙雷达观测被障碍物遮挡的指挥手势,得到雷达回波信号;所述障碍物包括墙体;对雷达回波信号进行多普勒谱与短时傅里叶变换时频谱分析,提取由障碍物遮挡指挥手势所引起的多维微多普勒特征;建立由历史观测雷达回波信号中提取的多维微多普勒特征和对应的指挥手势组成的训练集,对分类器进行训练;将实时提取的障碍物遮挡的指挥手势引起的多维微多普勒特征输入训练好的分类器进行识别,确定被遮挡的指挥手势。本发明可准确识别障碍物后的单兵指挥手势,有效为行动决策提供必要信

一种基于毫米波雷达的手势识别方法.pdf
本发明公开了一种基于毫米波雷达的手势识别方法,该方法包括:构建卷积神经网络模型;获取多种手势的轨迹图作为训练集F,基于所述训练集F对所述卷积神经网络模型训练,得到优化识别模型;所述手势轨迹图为最大峰值对应的动目标在距离‑多普勒坐标系下的移动轨迹;将识别手势的轨迹图输入所述优化识别模型,以识别出所述识别手势的手势类型。本发明实施方式提供的手势识别方法中利用卷积神经网络模型对多种手势的轨迹图训练,得到优化识别模型,将识别手势的轨迹图输入优化识别模型,能够快速并准确的得到手势类型。手势识别方法较为简单,数据处理
一种基于毫米波雷达的手势识别方法.pdf
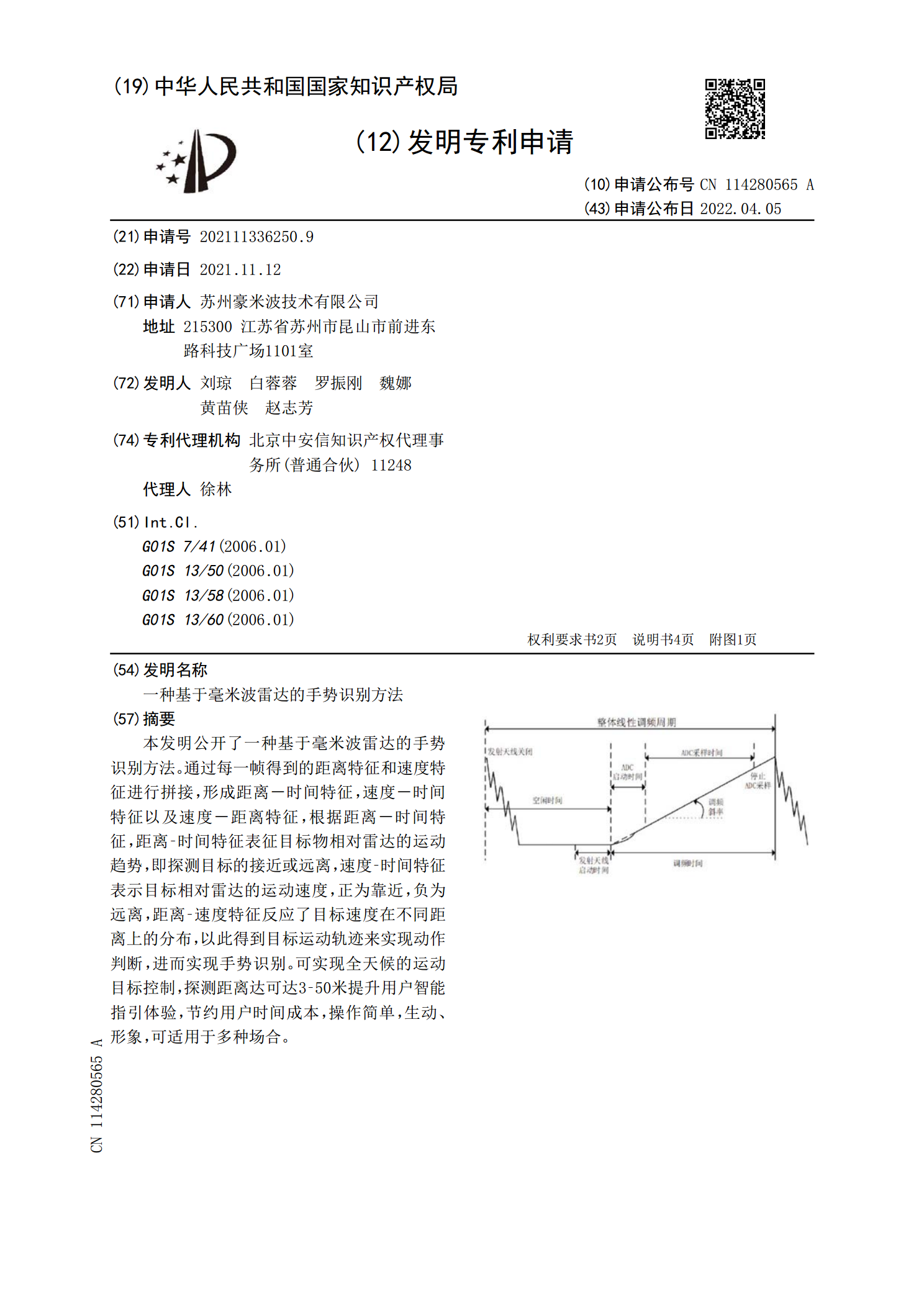
本发明公开了一种基于毫米波雷达的手势识别方法。通过每一帧得到的距离特征和速度特征进行拼接,形成距离-时间特征,速度-时间特征以及速度-距离特征,根据距离-时间特征,距离‑时间特征表征目标物相对雷达的运动趋势,即探测目标的接近或远离,速度‑时间特征表示目标相对雷达的运动速度,正为靠近,负为远离,距离‑速度特征反应了目标速度在不同距离上的分布,以此得到目标运动轨迹来实现动作判断,进而实现手势识别。可实现全天候的运动目标控制,探测距离达可达3‑50米提升用户智能指引体验,节约用户时间成本,操作简单,生动、形象,
一种基于可变形卷积的FMCW雷达手势识别方法.pdf
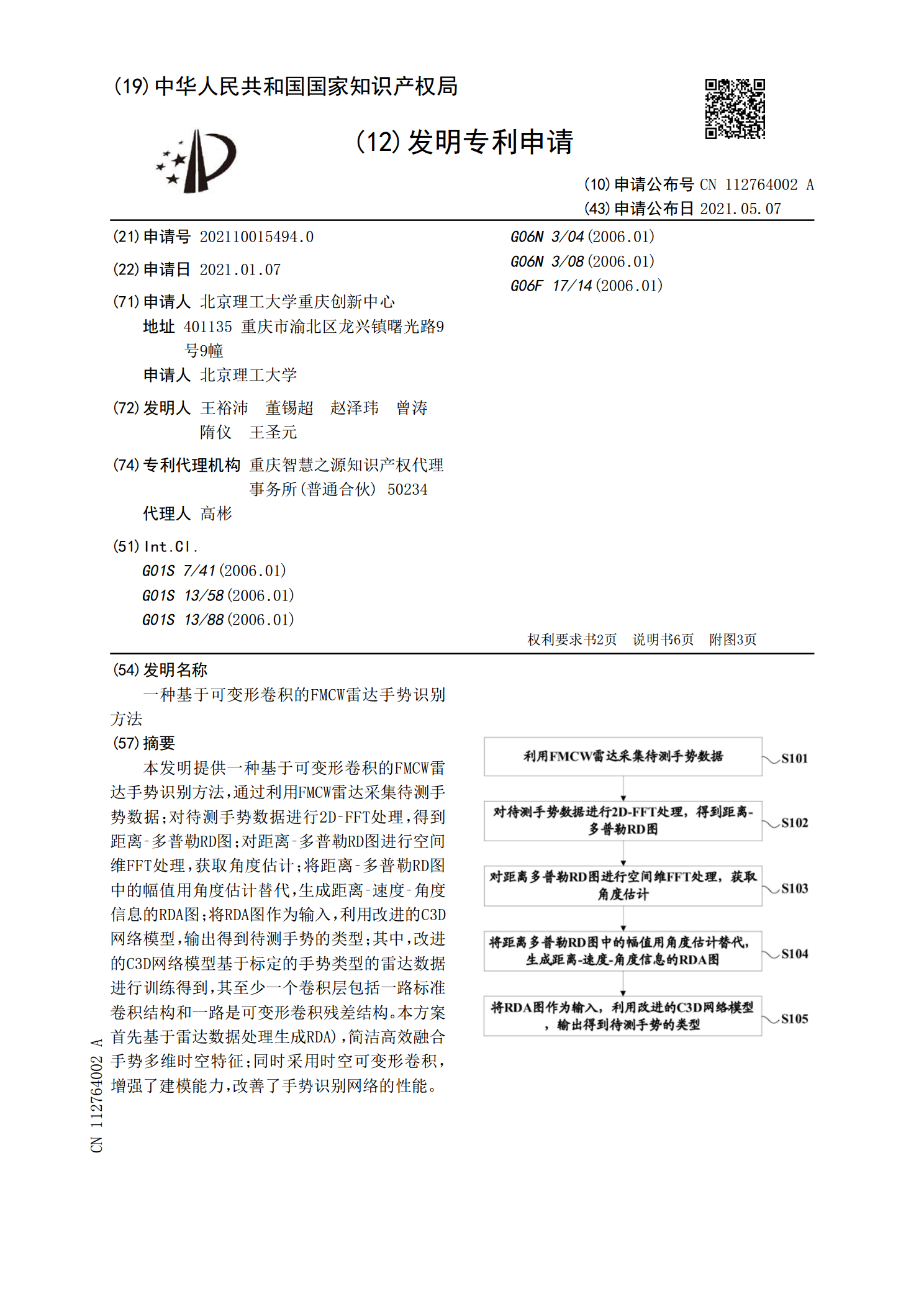
本发明提供一种基于可变形卷积的FMCW雷达手势识别方法,通过利用FMCW雷达采集待测手势数据;对待测手势数据进行2D‑FFT处理,得到距离‑多普勒RD图;对距离‑多普勒RD图进行空间维FFT处理,获取角度估计;将距离‑多普勒RD图中的幅值用角度估计替代,生成距离‑速度‑角度信息的RDA图;将RDA图作为输入,利用改进的C3D网络模型,输出得到待测手势的类型;其中,改进的C3D网络模型基于标定的手势类型的雷达数据进行训练得到,其至少一个卷积层包括一路标准卷积结构和一路是可变形卷积残差结构。本方案首先基于雷达