
一种基于SIMO多普勒雷达的弱约束步态轨迹处理方法.pdf

努力****恨风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于SIMO多普勒雷达的弱约束步态轨迹处理方法.pdf
本发明公开了一种基于SIMO多普勒雷达的弱约束步态轨迹处理方法,首先使用单发双收多普勒雷达采集受试者的步态数据,然后对数据进行预处理消除高频噪声对步态数据的影响;接下来里采用相关系数法计算接收到的两路信号的相位差,并计算受试者与雷达法线构成的夹角,即偏转角;接着根据多普勒效应计算受试目标朝向雷达设备的移动速度,并据此计算受试者在雷达设备法线方向上的移动距离;最后计算受试者在不同时间帧的运动方向,并将步态轨迹进行分割,得到多段运动方向与雷达设备法线方向解耦的直线步态轨迹。本发明在实现了对弱约束步态轨迹处理的

一种基于SIMO多普勒雷达的多目标动作识别方法.pdf
本发明涉及一种基于SIMO多普勒雷达的多目标动作识别方法,解决了智能人机交互与无线感知领域中基于多普勒雷达的感知方案不具备多目标感知的能力的问题。首先使用单发多收的多普勒雷达采集多个目标的手势动作信号,采集到的信号经由上位机接收并录制,交给后续算法处理;然后,对数据进行预处理,包括端点检测与信号分段、低通滤波、离散小波变换等;其次,采用基于最大信噪比的独立成分分析方法分离多目标信号,之后创新地采用双阶段特征提取的方法分别提取各个目标的特征向量,最后使用简单分类器如SVM、RF进行训练与分类,并根据分类所得

一种基于快速傅里叶变换的多普勒天气雷达弱杂波识别方法.docx
一种基于快速傅里叶变换的多普勒天气雷达弱杂波识别方法标题:一种基于快速傅里叶变换的多普勒天气雷达弱杂波识别方法摘要:多普勒天气雷达(DopplerWeatherRadar,DWR)广泛用于天气预报和气象研究中,但在识别弱信号和准确测量目标速度方面仍存在一定困难。为解决这一问题,本文提出了一种基于快速傅里叶变换的多普勒天气雷达弱杂波识别方法。该方法首先对DWR接收到的雷达回波信号进行快速傅里叶变换,并分析其频谱特征,进而利用各种信号处理算法对弱杂波进行准确判别和滤除。1.引言多普勒天气雷达在气象领域中具有重
一种脉冲多普勒雷达回波的弱信号提取方法.pdf
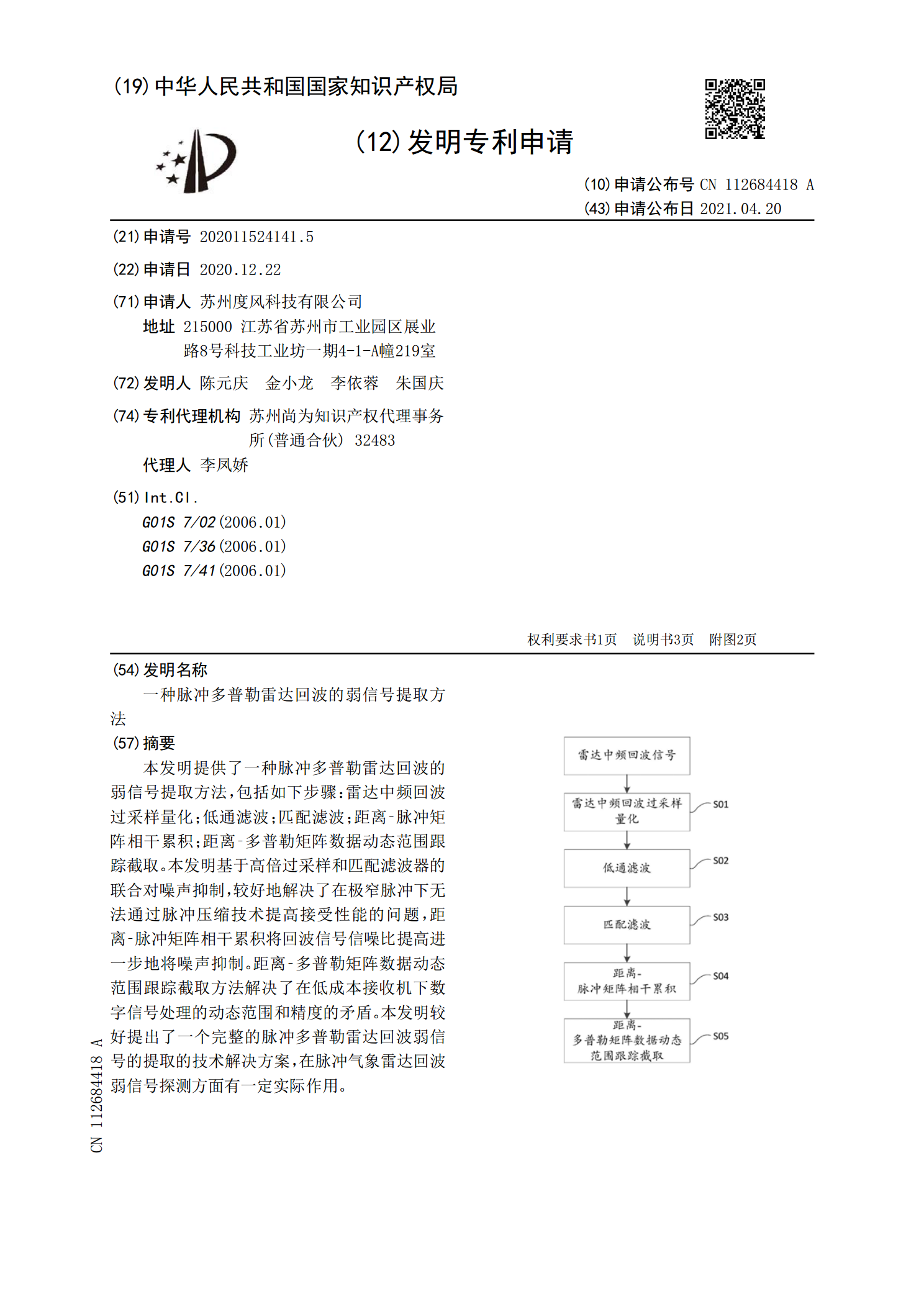
本发明提供了一种脉冲多普勒雷达回波的弱信号提取方法,包括如下步骤:雷达中频回波过采样量化;低通滤波;匹配滤波;距离‑脉冲矩阵相干累积;距离‑多普勒矩阵数据动态范围跟踪截取。本发明基于高倍过采样和匹配滤波器的联合对噪声抑制,较好地解决了在极窄脉冲下无法通过脉冲压缩技术提高接受性能的问题,距离‑脉冲矩阵相干累积将回波信号信噪比提高进一步地将噪声抑制。距离‑多普勒矩阵数据动态范围跟踪截取方法解决了在低成本接收机下数字信号处理的动态范围和精度的矛盾。本发明较好提出了一个完整的脉冲多普勒雷达回波弱信号的提取的技术解

一种改善双极化多普勒天气雷达弱回波发现能力的方法.docx
一种改善双极化多普勒天气雷达弱回波发现能力的方法双极化多普勒雷达是目前应用最广泛的雷达系统之一,其优势在于能够通过双极化参数接收不同方向的回波信号,可以获得更加准确的目标信息。然而,双极化多普勒雷达在检测弱回波时存在一些问题,如双极化参数的互相关性、天气杂波的影响等,影响了雷达探测的能力。因此,我们需要采取适当的措施来改善双极化多普勒天气雷达弱回波的探测能力。本文将从以下几个方面论述如何改善双极化多普勒天气雷达弱回波的探测能力:1.优化雷达参数设置双极化多普勒雷达的参数设置对于雷达探测的精度和敏感度有很大