
基于异构传感信息融合的导航定位方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于异构传感信息融合的导航定位方法.docx
基于异构传感信息融合的导航定位方法基于异构传感信息融合的导航定位方法摘要:随着人们对导航定位准确性要求的不断提高,传统的单一传感器定位已无法满足需求。为了提高导航定位的准确性和可靠性,本文基于异构传感信息融合提出了一种新的导航定位方法。该方法采用多种不同类型的传感器,如GPS、惯性测量单元(IMU)和视觉传感器,将它们的信息进行融合,以提高导航定位的准确性和可靠性。实验结果表明,该方法能够有效地提高导航定位的精度和稳定性,适用于各种应用场景。关键词:异构传感器;信息融合;导航定位;精度;稳定性1.引言导航

基于HMM的异构信息融合定位算法研究.docx
基于HMM的异构信息融合定位算法研究基于HMM的异构信息融合定位算法研究摘要:随着无线通信技术的发展,定位算法在无线传感器网络和移动通信领域发挥着重要的作用。然而,在实际应用中,传感器网络中的节点往往具有异构性,这给定位算法带来了挑战。本文提出了一种基于隐马尔可夫模型(HiddenMarkovModel,HMM)的异构信息融合定位算法,该算法利用不同传感器节点的异构信息,并结合HMM对位置信息进行建模和预测,提高了定位的准确性和稳定性。关键词:异构信息融合、定位算法、隐马尔可夫模型、准确性、稳定性1.引言

基于多传感器信息融合的室内定位方法研究.docx
基于多传感器信息融合的室内定位方法研究基于多传感器信息融合的室内定位方法研究摘要:室内定位在日常生活和工作中具有广泛应用的重要性。传统的室内定位方法往往受限于信号强度衰减、多径效应等问题,导致定位精度低、容易受到干扰。为了提高室内定位的准确性和稳定性,本文基于多传感器信息融合的思想,研究了一种新的室内定位方法。该方法利用了多个传感器,包括Wi-Fi,惯性测量单元(IMU)和深度相机,以及机器学习和滤波算法,将多源信息进行融合,以实现室内定位。关键词:室内定位,多传感器信息融合,Wi-Fi,IMU,深度相机
一种基于多传感器信息融合的连续采煤机导航与定位系统.pdf
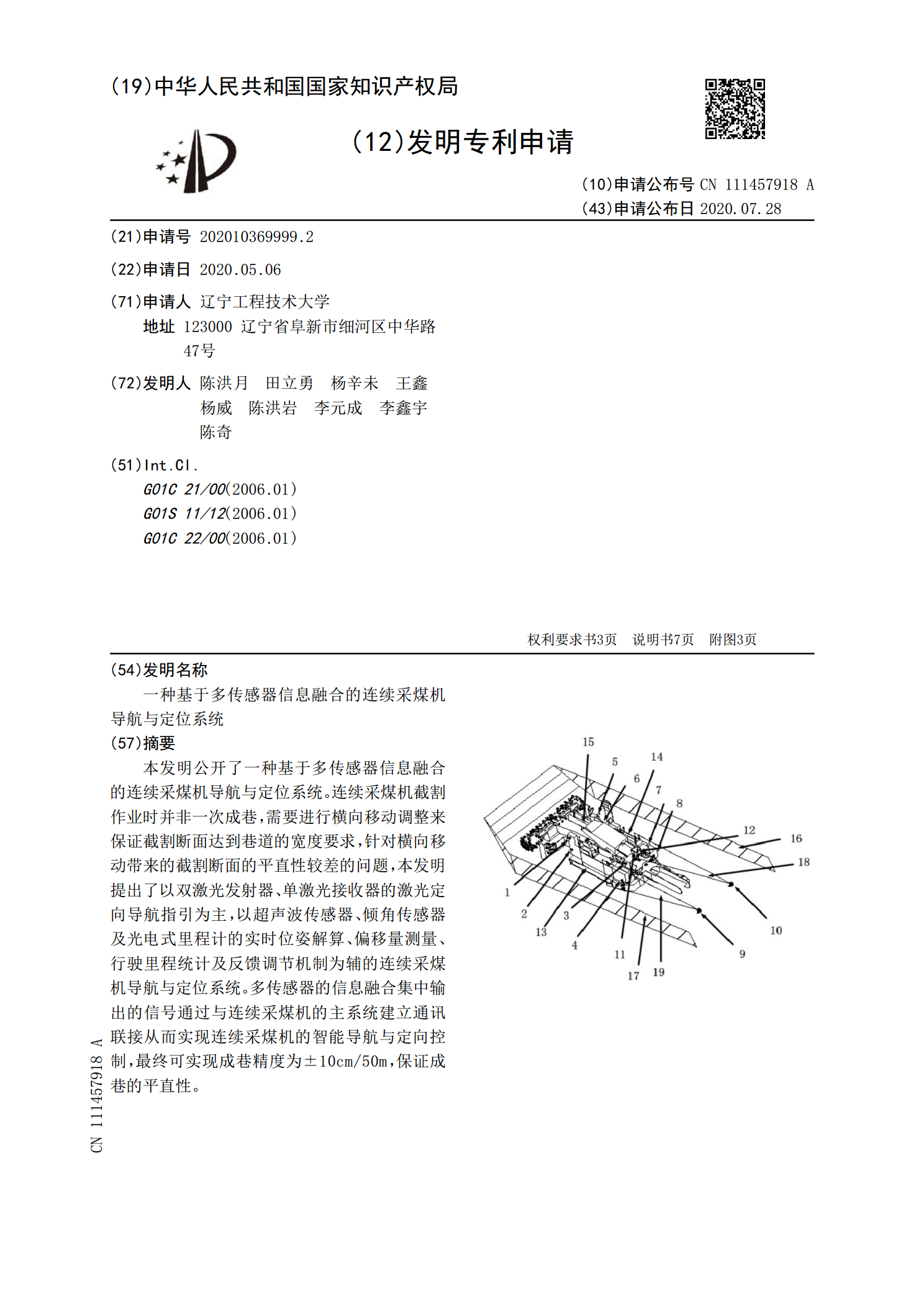
本发明公开了一种基于多传感器信息融合的连续采煤机导航与定位系统。连续采煤机截割作业时并非一次成巷,需要进行横向移动调整来保证截割断面达到巷道的宽度要求,针对横向移动带来的截割断面的平直性较差的问题,本发明提出了以双激光发射器、单激光接收器的激光定向导航指引为主,以超声波传感器、倾角传感器及光电式里程计的实时位姿解算、偏移量测量、行驶里程统计及反馈调节机制为辅的连续采煤机导航与定位系统。多传感器的信息融合集中输出的信号通过与连续采煤机的主系统建立通讯联接从而实现连续采煤机的智能导航与定向控制,最终可实现成巷

基于AprilTag码的多传感器融合定位导航方法、装置及系统.pdf
本发明公开了一种基于AprilTag码的多传感器融合定位导航方法、装置及系统,其中方法包括:根据初始位姿与目标点位姿在格栅地图上进行路径规划,得到规划路径;基于定位算法控制所述机器人沿着所述规划路径行走,同时通过相机采集图像数据;当所述相机采集到包含AprilTag码的图像,利用AprilTag库对图像中的所述AprilTag码进行解码,获得所述AprilTag码的ID数据以及所述相机与所述AprilTag码的相对位姿;根据所述相对位姿以及所述AprilTag码在所述格栅地图中的位姿数据计算所述机器人的精