
基于多普勒频率辅助平滑的高精度卫星导航定位解算方法.pdf

一吃****春晓


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多普勒频率辅助平滑的高精度卫星导航定位解算方法.pdf
本发明公开了一种基于多普勒频率辅助平滑的高精度卫星导航定位解算方法,一、构建最优化伪距滤波器和最优化多普勒滤波器;二、构建系数滤波器;三、将导航接收机内码环提供的第i颗卫星在k时刻的伪距观测量ρ
低轨卫星备份导航系统多普勒定位解算方法.pdf
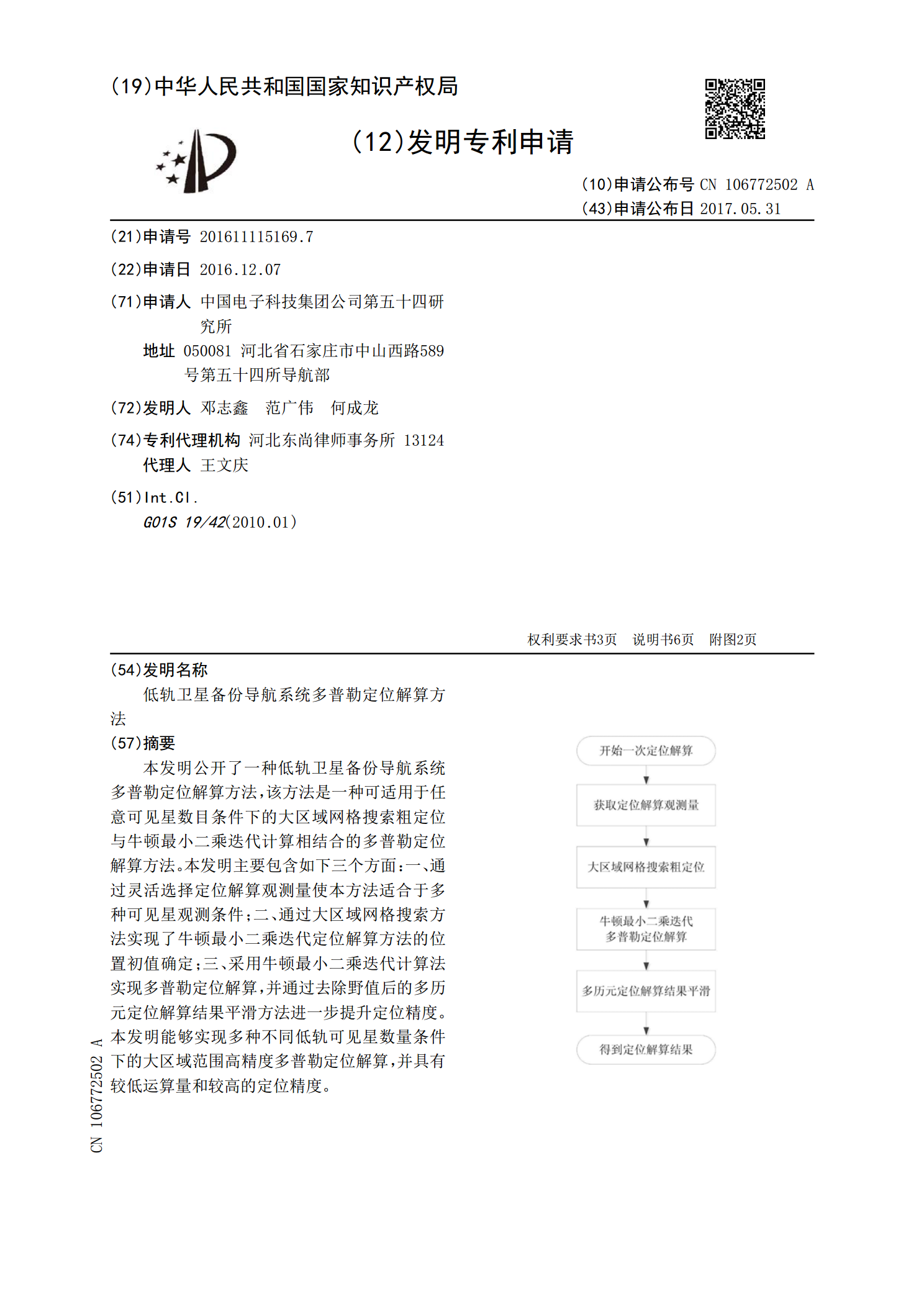
本发明公开了一种低轨卫星备份导航系统多普勒定位解算方法,该方法是一种可适用于任意可见星数目条件下的大区域网格搜索粗定位与牛顿最小二乘迭代计算相结合的多普勒定位解算方法。本发明主要包含如下三个方面:一、通过灵活选择定位解算观测量使本方法适合于多种可见星观测条件;二、通过大区域网格搜索方法实现了牛顿最小二乘迭代定位解算方法的位置初值确定;三、采用牛顿最小二乘迭代计算法实现多普勒定位解算,并通过去除野值后的多历元定位解算结果平滑方法进一步提升定位精度。本发明能够实现多种不同低轨可见星数量条件下的大区域范围高精度

导航卫星定位解算方法及装置.pdf
本发明公开了一种导航卫星定位解算方法及装置,该方法包括:对对上、下边带导频路信号进行捕获,获取上、下边带的多普勒频移以及码相位值;根据上边带的多普勒频移以及码相位值,获取上边带信号电文数据;根据下边带的多普勒频移以及码相位值,获取下边带信号电文数据;基于上边带信号电文数据以及下边带信号电文数据,获取卫星导航定位结果;确定所述卫星导航定位结果中的异常数据;若存在所述异常数据,则确定应急解算策略;根据所述应急解算策略纠正解算结果。通过本发明提供的方法可以实现信号异常频繁情况下的ACE-BOC接收处理,利用AC

低轨卫星导航系统多场景多普勒定位解算方法.docx
低轨卫星导航系统多场景多普勒定位解算方法一、引言随着人类社会的不断发展,导航系统也越来越受到人们的关注。导航系统已经成为现代科技的重要组成部分,在诸多领域得到广泛应用。低轨卫星导航系统是其中的一个重要分支,在不同领域如交通运输、航空航天、地理测量等领域都有广泛的应用。在未来,低轨卫星导航系统将成为人们日常生活不可或缺的一部分。二、低轨卫星导航系统低轨卫星导航系统是一个全球性的定位导航系统,主要由美国、俄罗斯、欧洲、中国等国家开发建设。其中,美国的GPS系统、俄罗斯的GLONASS系统、欧洲的Galileo

基于容积卡尔曼滤波的卫星导航定位解算方法.pptx
,目录PartOnePartTwo容积卡尔曼滤波算法概述容积卡尔曼滤波算法的基本原理容积卡尔曼滤波算法的优势PartThree卫星导航定位系统简介基于容积卡尔曼滤波的定位解算方法流程定位解算方法的实现细节定位解算方法的精度评估PartFour实际应用场景介绍容积卡尔曼滤波在定位中的具体应用实际应用效果分析容积卡尔曼滤波在定位中的优势与局限性PartFive容积卡尔曼滤波算法的改进方向卫星导航定位技术的发展趋势基于容积卡尔曼滤波的定位解算方法在未来发展中的应用前景THANKS