
低轨卫星备份导航系统多普勒定位解算方法.pdf

鸿朗****ka

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
低轨卫星备份导航系统多普勒定位解算方法.pdf
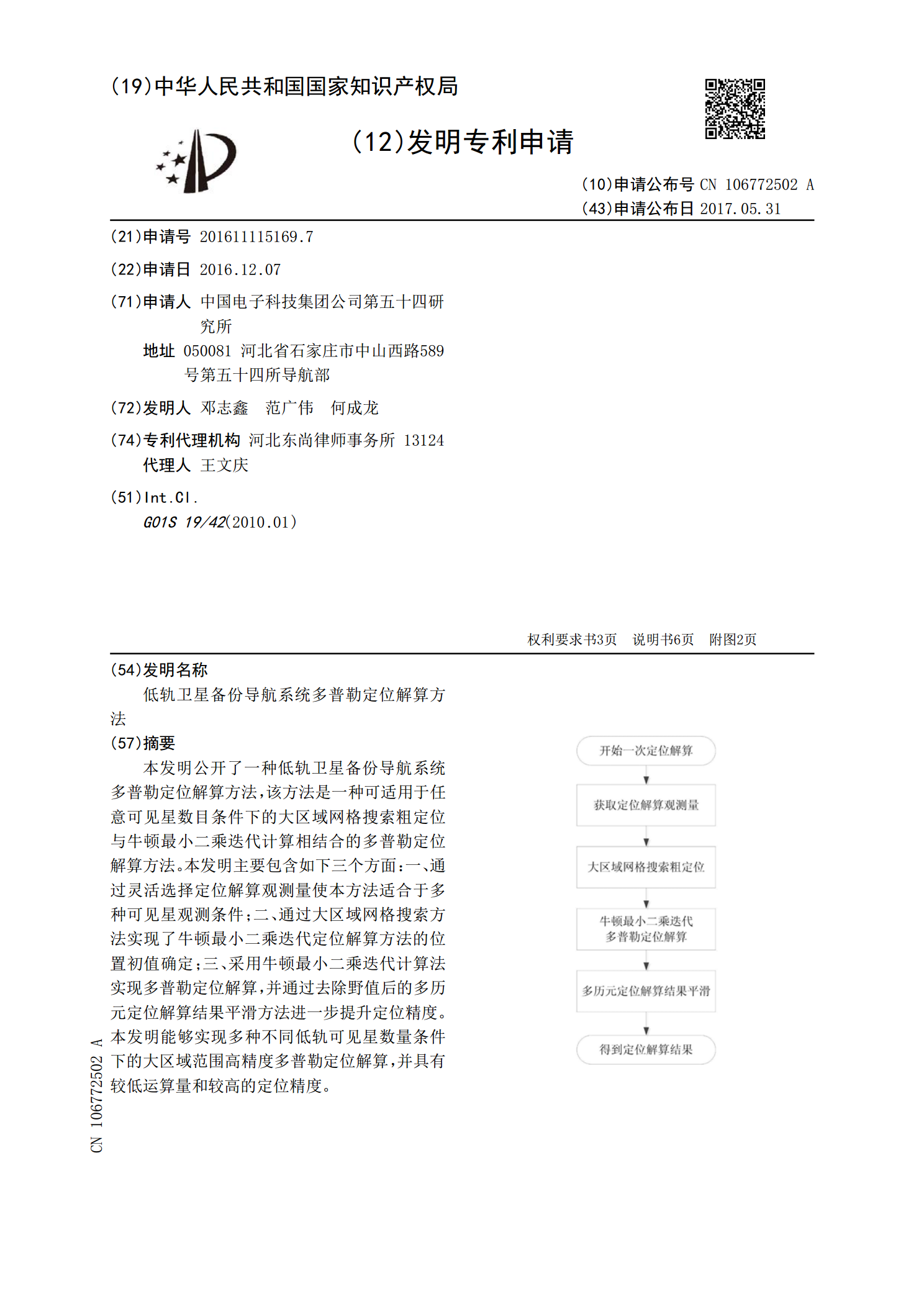
本发明公开了一种低轨卫星备份导航系统多普勒定位解算方法,该方法是一种可适用于任意可见星数目条件下的大区域网格搜索粗定位与牛顿最小二乘迭代计算相结合的多普勒定位解算方法。本发明主要包含如下三个方面:一、通过灵活选择定位解算观测量使本方法适合于多种可见星观测条件;二、通过大区域网格搜索方法实现了牛顿最小二乘迭代定位解算方法的位置初值确定;三、采用牛顿最小二乘迭代计算法实现多普勒定位解算,并通过去除野值后的多历元定位解算结果平滑方法进一步提升定位精度。本发明能够实现多种不同低轨可见星数量条件下的大区域范围高精度

低轨卫星导航系统多场景多普勒定位解算方法.docx
低轨卫星导航系统多场景多普勒定位解算方法一、引言随着人类社会的不断发展,导航系统也越来越受到人们的关注。导航系统已经成为现代科技的重要组成部分,在诸多领域得到广泛应用。低轨卫星导航系统是其中的一个重要分支,在不同领域如交通运输、航空航天、地理测量等领域都有广泛的应用。在未来,低轨卫星导航系统将成为人们日常生活不可或缺的一部分。二、低轨卫星导航系统低轨卫星导航系统是一个全球性的定位导航系统,主要由美国、俄罗斯、欧洲、中国等国家开发建设。其中,美国的GPS系统、俄罗斯的GLONASS系统、欧洲的Galileo

星载GNSS低轨卫星精密定轨快速解算方法.docx
星载GNSS低轨卫星精密定轨快速解算方法星载GNSS(GlobalNavigationSatelliteSystem)低轨卫星精密定轨快速解算方法摘要:星载GNSS低轨卫星在航天应用领域具有重要意义。为了实现精密定轨和快速解算,本文对星载GNSS低轨卫星精密定轨快速解算方法进行了探讨。首先介绍了星载GNSS低轨卫星的基本原理和特点,然后详细阐述了精密定轨和快速解算方法的原理和步骤,最后讨论了存在的问题和发展趋势。研究结果表明,在星载GNSS低轨卫星应用中,精密定轨和快速解算方法在提高导航精度和速度方面具有

基于多普勒频率辅助平滑的高精度卫星导航定位解算方法.pdf
本发明公开了一种基于多普勒频率辅助平滑的高精度卫星导航定位解算方法,一、构建最优化伪距滤波器和最优化多普勒滤波器;二、构建系数滤波器;三、将导航接收机内码环提供的第i颗卫星在k时刻的伪距观测量ρ

一种基于多普勒信息的低轨卫星/惯性组合导航定位方法.pdf
本发明提出一种基于多普勒信息的低轨卫星/惯性组合导航定位方法,能够在轨道信息、钟差信息等先验信息不完备的条件下将低轨通信卫星与惯性导航系统进行组合导航定位的方法。通过使用该方法,组合导航系统在卫星导航信号可用时对低轨卫星的位置、钟差、钟漂等参数进行精确预测,当卫星导航信号受到干扰后不可用时,则利用低轨卫星的多普勒信息来进行定位解算,保证组合导航系统的定位误差不因惯性系统的误差积累而发散,从而保持定位精度。