
复杂环境下多源异构自适应组合导航技术研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

复杂环境下多源异构自适应组合导航技术研究.docx
复杂环境下多源异构自适应组合导航技术研究复杂环境下多源异构自适应组合导航技术研究摘要:随着技术的日益发展,导航系统已成为现代人类生活中不可或缺的一部分。然而,在复杂环境下,传统的导航系统往往面临着诸多挑战,如信号受阻、定位误差增大等问题。为了解决这些问题,本文研究了多源异构自适应组合导航技术,并提出了一种基于多源异构数据的导航系统,实现了在复杂环境下准确、稳定的定位与导航。关键词:多源异构数据;自适应组合;导航技术1.引言随着全球定位系统(GPS)的普及和发展,人类在导航领域取得了许多重要的突破。然而,传
一种复杂环境下的多源组合导航定位方法.pdf
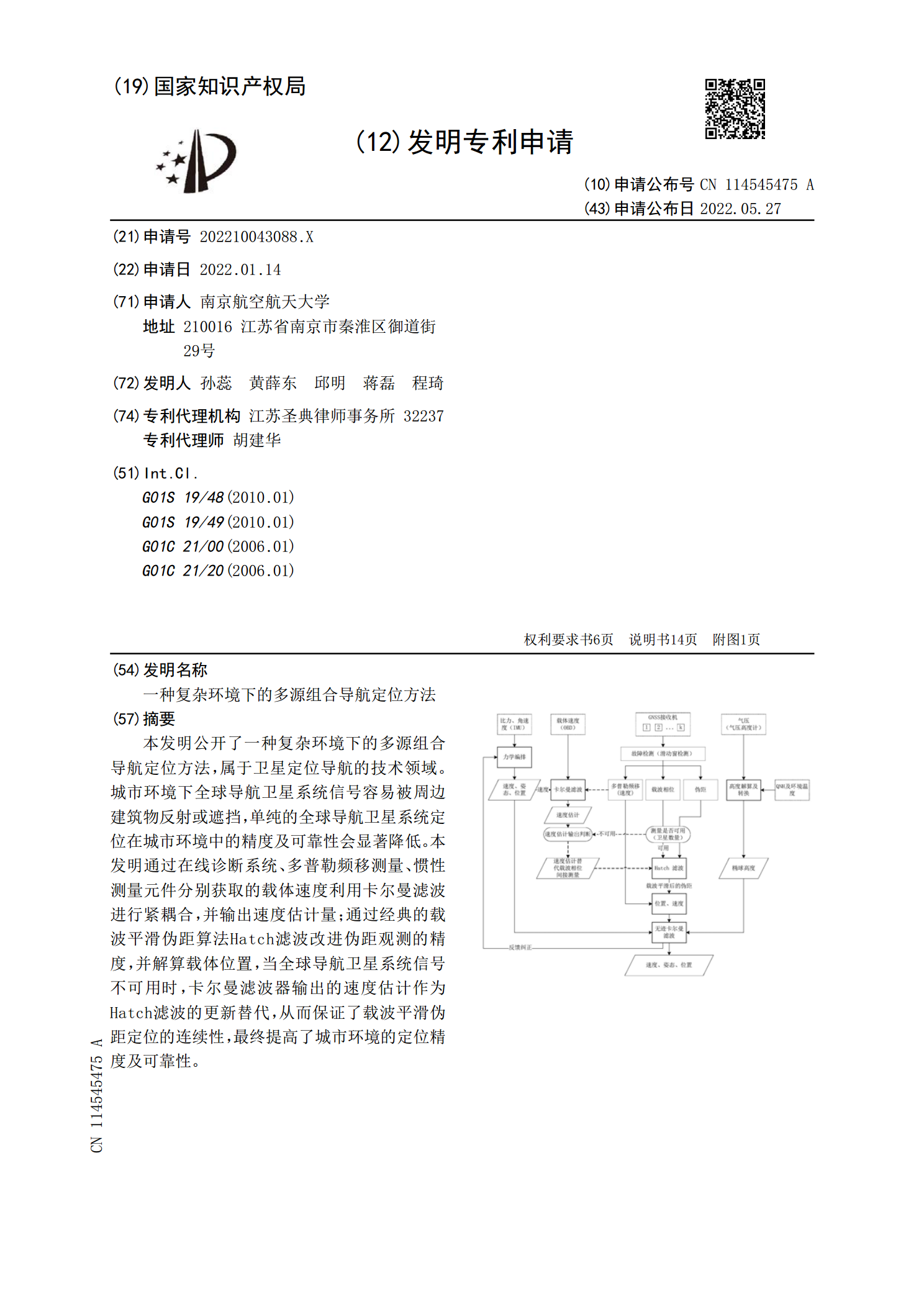
本发明公开了一种复杂环境下的多源组合导航定位方法,属于卫星定位导航的技术领域。城市环境下全球导航卫星系统信号容易被周边建筑物反射或遮挡,单纯的全球导航卫星系统定位在城市环境中的精度及可靠性会显著降低。本发明通过在线诊断系统、多普勒频移测量、惯性测量元件分别获取的载体速度利用卡尔曼滤波进行紧耦合,并输出速度估计量;通过经典的载波平滑伪距算法Hatch滤波改进伪距观测的精度,并解算载体位置,当全球导航卫星系统信号不可用时,卡尔曼滤波器输出的速度估计作为Hatch滤波的更新替代,从而保证了载波平滑伪距定位的连续

复杂环境下组合导航关键技术研究的任务书.docx
复杂环境下组合导航关键技术研究的任务书任务书1.任务背景在当今社会,人们不再局限于传统的定位方式,如地图与指南针等设备已无法完全满足人们的需求。特别是在室内环境下,传统的导航方式很难实现,人们需要更为精准和高效的导航方式。为了满足人们对精准导航的需求,组合导航成为研究的热点。组合导航将多种导航方式以及传感器技术相结合,从而实现高精度的导航,并在很多领域得到了广泛应用。因此,对组合导航关键技术的研究显得尤为重要。2.研究目的考虑到组合导航的多种导航方式和传感器技术,本研究的主要目的是研究如何通过各种导航方式

基于ZYNQ的组合导航多源异构数据时间同步方法.pdf
本发明公开一种基于ZYNQ的组合导航多源异构数据时间同步方法,包括以下步骤:(10)传感器数据采集:基于ZYNQ平台,采集传感器发送的原始数据;(20)时钟基准建立:构建微秒级时钟计数器,获得时间戳数据,根据数据传输停止时的计数值得到本次采集的数据时间戳;(30)数据类型识别:识别接收到的不同传感器数据或相同传感器的不同类型数据,建立相应的处理线程;(40)相同结构数据帧组建:将各传感器有效数据与采集的数据时间戳结合,构成相同结构的新组建数据帧,并添加数据类型ID;(50)数据帧传输:将新组建数据帧传输到

多源组合导航系统故障检测技术研究.docx
多源组合导航系统故障检测技术研究论文题目:多源组合导航系统故障检测技术研究摘要:随着智能导航系统的发展,多源组合导航系统越来越受到关注。然而,由于各导航源的不同特点和精度限制,多源组合导航系统可能出现故障,导致导航信息不准确。因此,研究多源组合导航系统的故障检测技术对于提高导航系统的可靠性和准确性具有重要意义。本文综述了多源组合导航系统的基本原理、常见故障类型,并详细分析了现有的故障检测技术。在此基础上,本文提出了一种基于卡尔曼滤波的多源组合导航系统故障检测技术,并对其进行了仿真实验,验证了该方法的有效性