
包括限制机器速度在内控制机器操作.pdf

努力****星驰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

包括限制机器速度在内控制机器操作.pdf
根据一个实例,公开了一种用于控制作业车辆在作业区域内的移动的系统。所述系统可任选地包括被配置成引导作业车辆的移动的转向系统、物体检测系统、速度传感器和控制器。物体检测系统可具有被配置成检测作业区域内的物体的一个或多个传感器。速度传感器可以被配置成测量作业车辆在作业区域内的表面上的速度。控制器可以通信地耦合到转向系统、物体检测系统和速度传感器。控制器可以被配置成基于作业车辆的转向角控制作业车辆的速度。

基于运动速度的机器人学习控制.docx
基于运动速度的机器人学习控制基于运动速度的机器人学习控制摘要:随着机器人技术的迅速发展,机器人学习控制成为一个重要的研究领域。在机器人移动控制中,运动速度是一个关键因素。本论文将重点讨论基于运动速度的机器人学习控制,包括机器人学习算法、机器人学习控制系统的搭建以及最新的研究进展。通过对机器人学习控制的研究,可以有效提高机器人的移动性能,实现更智能的机器人控制。1.引言随着机器人技术的不断发展,越来越多的机器人被应用于各种场景,如工业生产、医疗服务和农业等。机器人学习控制技术是机器人运动控制的重要组成部分。

具有无级变速器的机器的速度控制.pdf
一种控制具有操作性地联接到动力源(106)的无级变速器(CVT)(110)的机器(100)的速度的系统和方法。多个可选择的当量传动比(214)可与CVT(110)相关联。该机器可包括可以产生指示地面速度的所需调整的操作者输入信号的操作者输入装置(130)。可将操作者输入信号转换为CVT速度指令(248)和动力源速度指令(278),它们分别被传送到CVT(110)和动力源(106)。CVT(110)根据CVT速度指令(248)调整机器速度,同时动力源(106)根据动力源速度指令(278)调整自身的速度,使得
液压系统及其控制方法和包括液压系统的机器.pdf
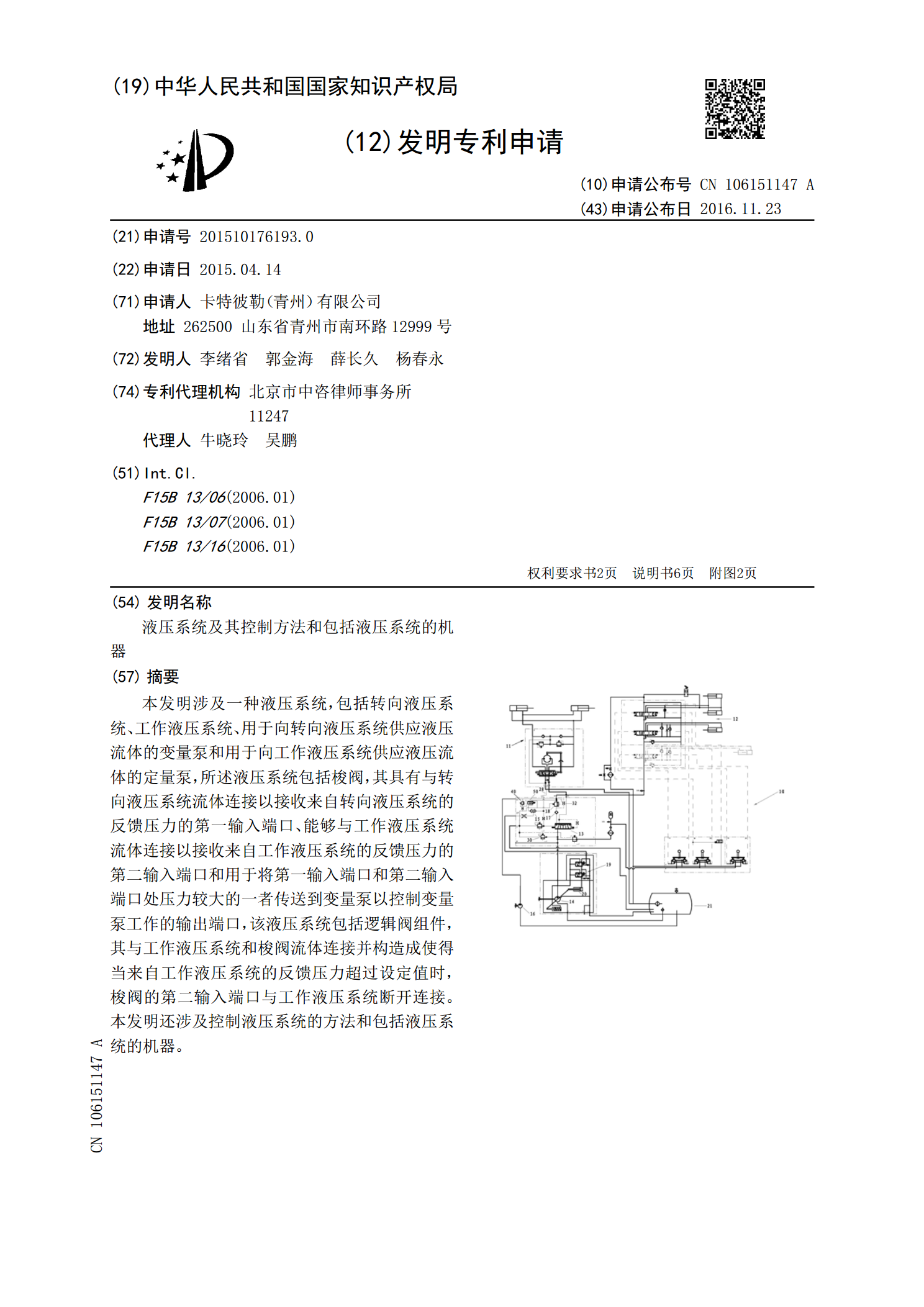
本发明涉及一种液压系统,包括转向液压系统、工作液压系统、用于向转向液压系统供应液压流体的变量泵和用于向工作液压系统供应液压流体的定量泵,所述液压系统包括梭阀,其具有与转向液压系统流体连接以接收来自转向液压系统的反馈压力的第一输入端口、能够与工作液压系统流体连接以接收来自工作液压系统的反馈压力的第二输入端口和用于将第一输入端口和第二输入端口处压力较大的一者传送到变量泵以控制变量泵工作的输出端口,该液压系统包括逻辑阀组件,其与工作液压系统和梭阀流体连接并构造成使得当来自工作液压系统的反馈压力超过设定值时,梭阀

在工地监测机器拖运条件的系统和方法及包括其的机器.pdf
机器(10)包括框架(12)、安装到框架(12)并包括支柱(30、30’)的悬架系统(14)、以及由框架(12)支撑的拖运条件监测系统(25)。拖运条件监测系统(25)包括压力传感器(100),其与支柱(30、30’)、地理定位单元(102)、承载拖运条件监测程序的计算机可读介质(105)、控制器(104)和接口设备(107)一起布置。控制器(104)与压力传感器(100)和地理定位单元(102)可操作地通信以接收它们的信号并配置为执行拖运条件监测程序。接口设备(107)与控制器(104)可操作地通信,并