
一种消除伺服系统抖动的电磁装置及方法.pdf

一只****写意


1/8

2/8
3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种消除伺服系统抖动的电磁装置及方法.pdf
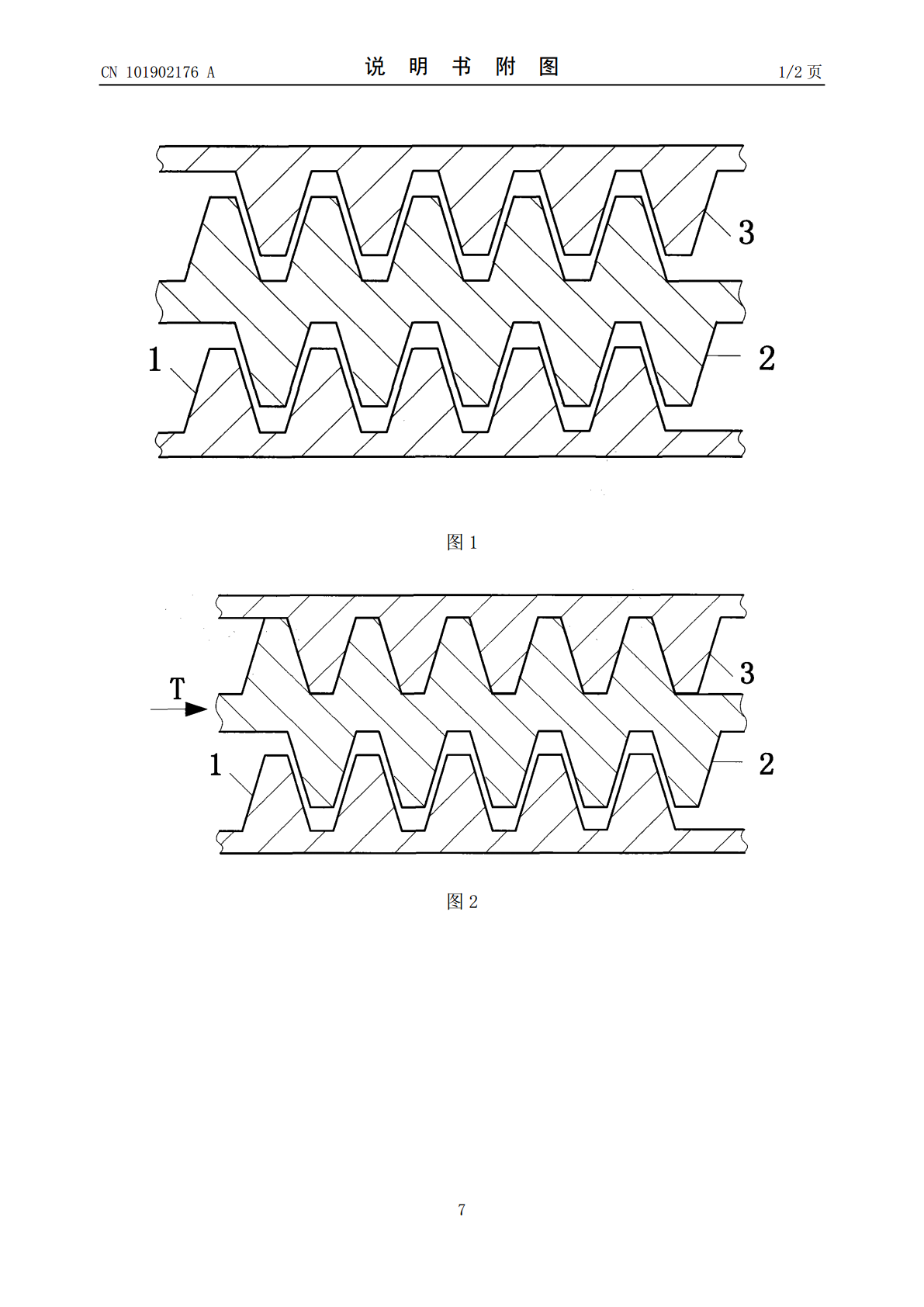
本发明公开了一种消除伺服系统抖动的电磁装置及方法。本发明的电磁装置包括永磁体(4)、金属壳(5)、第一电磁铁(6)、第二电磁铁(7)、输出轴(8)、连杆(9)以及电源(10);将所述电磁装置与位置测量传感器同轴安装,通过控制电磁装置中电源(10)的电压大小和方向,输出轴(8)给位置测量传感器施加一个与减速器输出轴转动方向相反的作用力,使减速器输出轴与位置测量传感器齿系的一侧一直处于啮合状态,两者成近似刚性连接;本发明可以改善减速器输出轴与位置测量传感器之间的啮合状态,消除伺服系统的抖动问题。
一种带钢抖动消除装置和消除方法.pdf
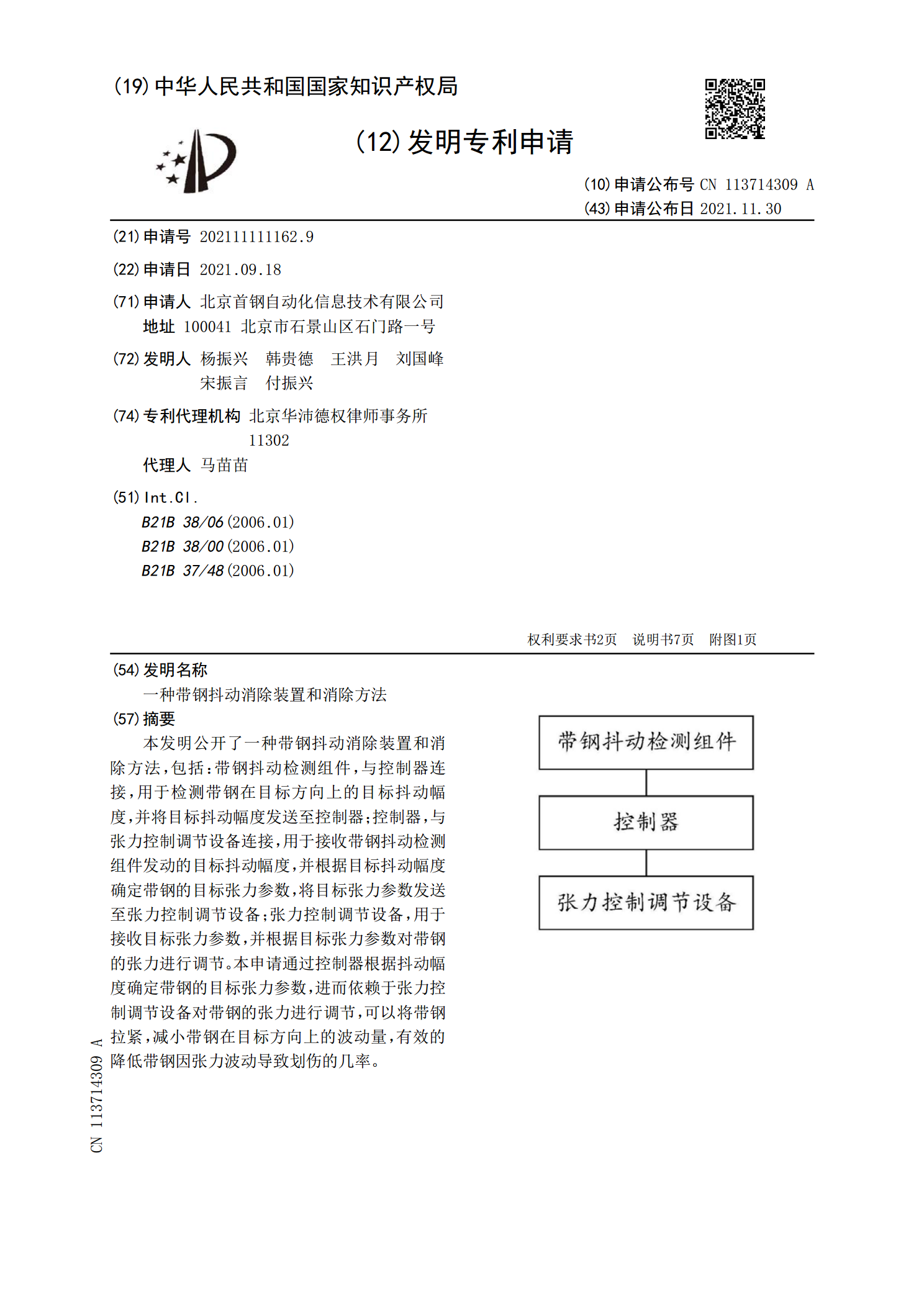
本发明公开了一种带钢抖动消除装置和消除方法,包括:带钢抖动检测组件,与控制器连接,用于检测带钢在目标方向上的目标抖动幅度,并将目标抖动幅度发送至控制器;控制器,与张力控制调节设备连接,用于接收带钢抖动检测组件发动的目标抖动幅度,并根据目标抖动幅度确定带钢的目标张力参数,将目标张力参数发送至张力控制调节设备;张力控制调节设备,用于接收目标张力参数,并根据目标张力参数对带钢的张力进行调节。本申请通过控制器根据抖动幅度确定带钢的目标张力参数,进而依赖于张力控制调节设备对带钢的张力进行调节,可以将带钢拉紧,减小带
一种图像抖动模糊消除方法及装置.pdf
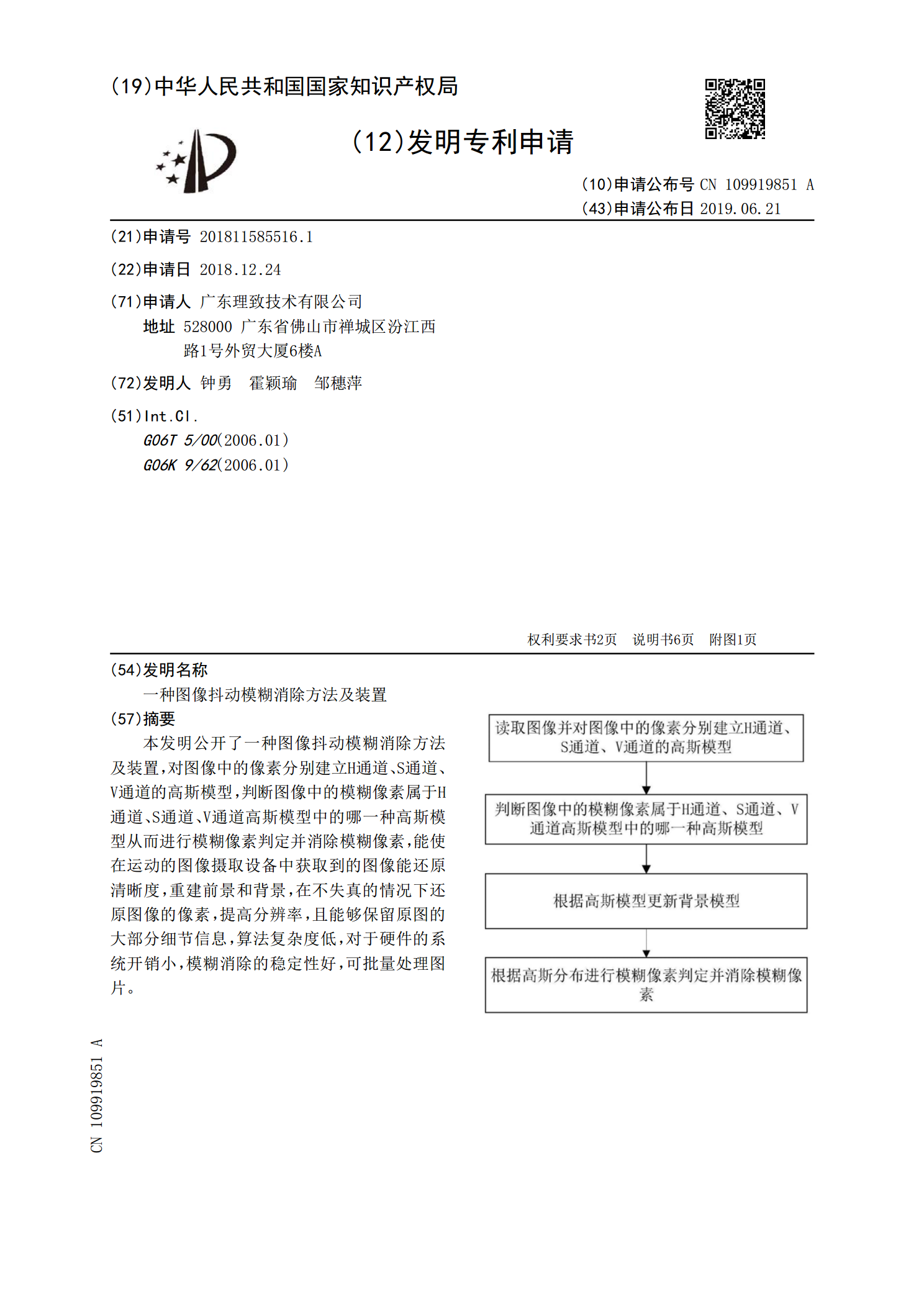
本发明公开了一种图像抖动模糊消除方法及装置,对图像中的像素分别建立H通道、S通道、V通道的高斯模型,判断图像中的模糊像素属于H通道、S通道、V通道高斯模型中的哪一种高斯模型从而进行模糊像素判定并消除模糊像素,能使在运动的图像摄取设备中获取到的图像能还原清晰度,重建前景和背景,在不失真的情况下还原图像的像素,提高分辨率,且能够保留原图的大部分细节信息,算法复杂度低,对于硬件的系统开销小,模糊消除的稳定性好,可批量处理图片。
一种电梯防抖动装置及其防抖动方法.pdf
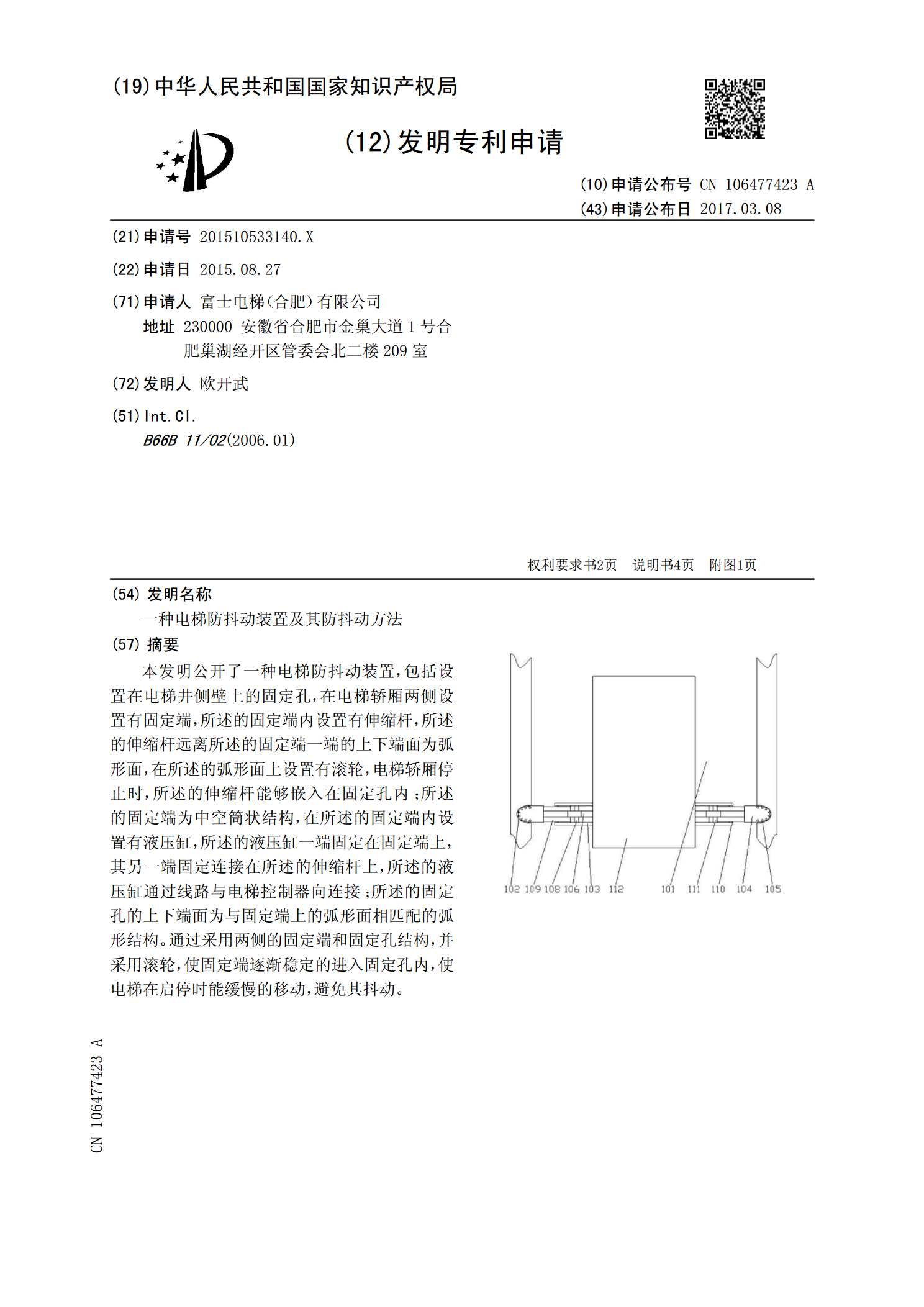
本发明公开了一种电梯防抖动装置,包括设置在电梯井侧壁上的固定孔,在电梯轿厢两侧设置有固定端,所述的固定端内设置有伸缩杆,所述的伸缩杆远离所述的固定端一端的上下端面为弧形面,在所述的弧形面上设置有滚轮,电梯轿厢停止时,所述的伸缩杆能够嵌入在固定孔内;所述的固定端为中空筒状结构,在所述的固定端内设置有液压缸,所述的液压缸一端固定在固定端上,其另一端固定连接在所述的伸缩杆上,所述的液压缸通过线路与电梯控制器向连接;所述的固定孔的上下端面为与固定端上的弧形面相匹配的弧形结构。通过采用两侧的固定端和固定孔结构,并采

一种道闸栏杆运行抖动的消除方法.pdf
本发明公开了一种道闸栏杆运行抖动的消除方法,包括以下步骤:S10:齿轮减速器将弹簧力矩、栏杆静力矩、栏杆运行所需力矩的和力矩信号直接反馈到电机上;S20:四象限变频器根据反馈回来的合力矩信号,计算出电机的输出力矩,以及配重弹簧与栏杆间的力矩差;S30:四象限变频器根据步骤S20中的计算结果控制电机四象限运行,电机输出相应的力矩;S40:电机输出的力矩通过齿轮减速器作用到栏杆上,带动栏杆运行。该方法从根本上解决了抖动发生的条件,同时降低了减速器的加工难度,提高了道闸的使用寿命。