
智能引导装置及引导方法.pdf

书錦****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能引导装置及引导方法.pdf
本发明公开了一种智能引导装置及引导方法,其装置包括多个安装在公共场所的激光灯,所述激光灯包括灯座和位于灯座上方的灯杆,所述灯杆包括内部设置为中空结构的套杆,且套杆和灯座之间安装有角度调节机构,所述套杆的顶部开设有第一安装通孔,且第一安装通孔的内壁滑动连接有芯杆,所述芯杆的顶部安装有位于套杆上方的发光组件,且芯杆的底部开设有螺纹槽,所述螺纹槽的内侧啮合有丝杆,且丝杆的底端焊接有驱动电机的输出轴。本发明中的发光组件所在的高度位置可调,便于工作人员对发光组件进行维修,且角度调节机构的转动角度大于设定值时,灯杆被
引导装置、用于制造引导装置的方法及使用引导装置的方法.pdf
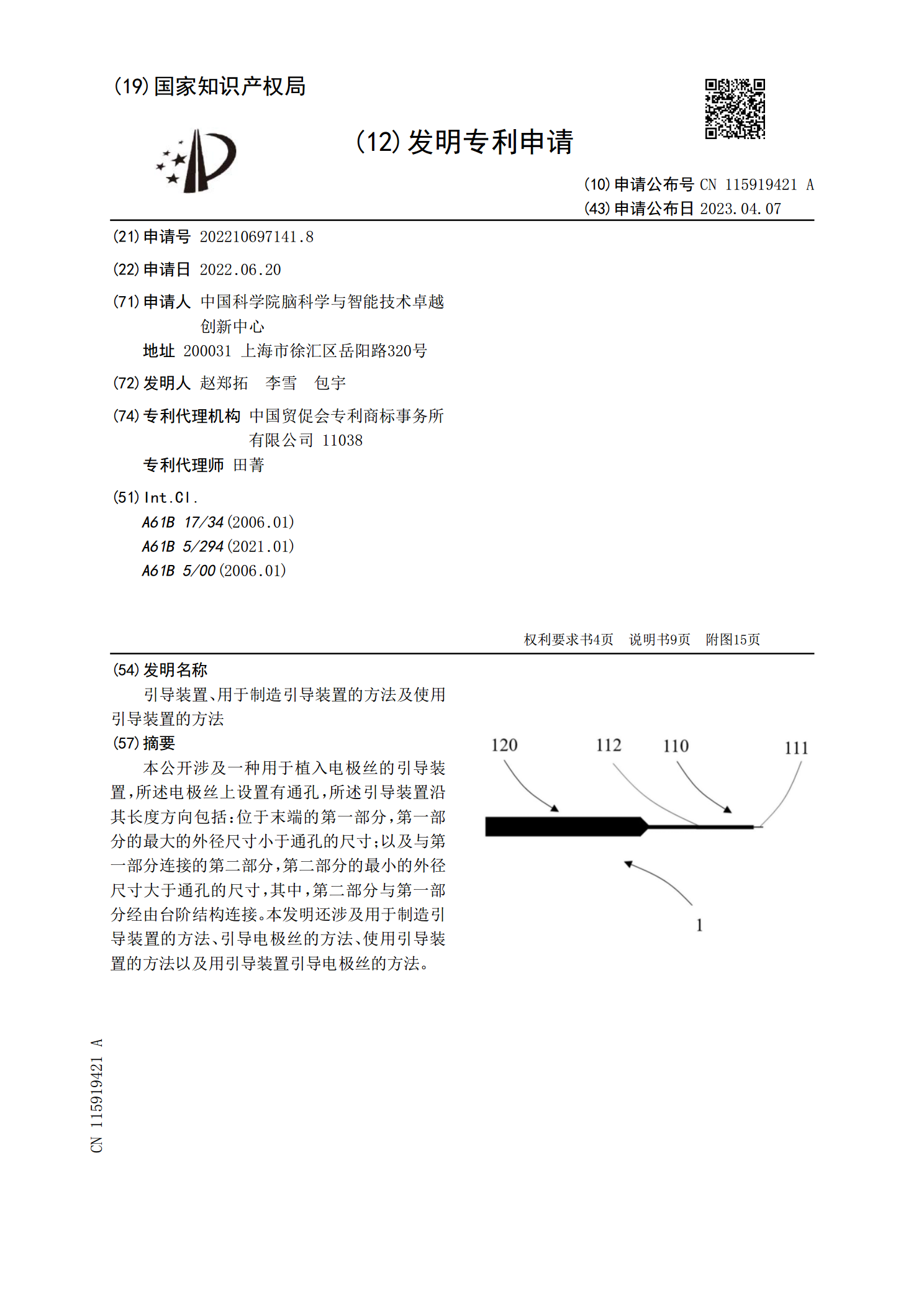
本公开涉及一种用于植入电极丝的引导装置,所述电极丝上设置有通孔,所述引导装置沿其长度方向包括:位于末端的第一部分,第一部分的最大的外径尺寸小于通孔的尺寸;以及与第一部分连接的第二部分,第二部分的最小的外径尺寸大于通孔的尺寸,其中,第二部分与第一部分经由台阶结构连接。本发明还涉及用于制造引导装置的方法、引导电极丝的方法、使用引导装置的方法以及用引导装置引导电极丝的方法。
引导装置、引导方法和程序.pdf
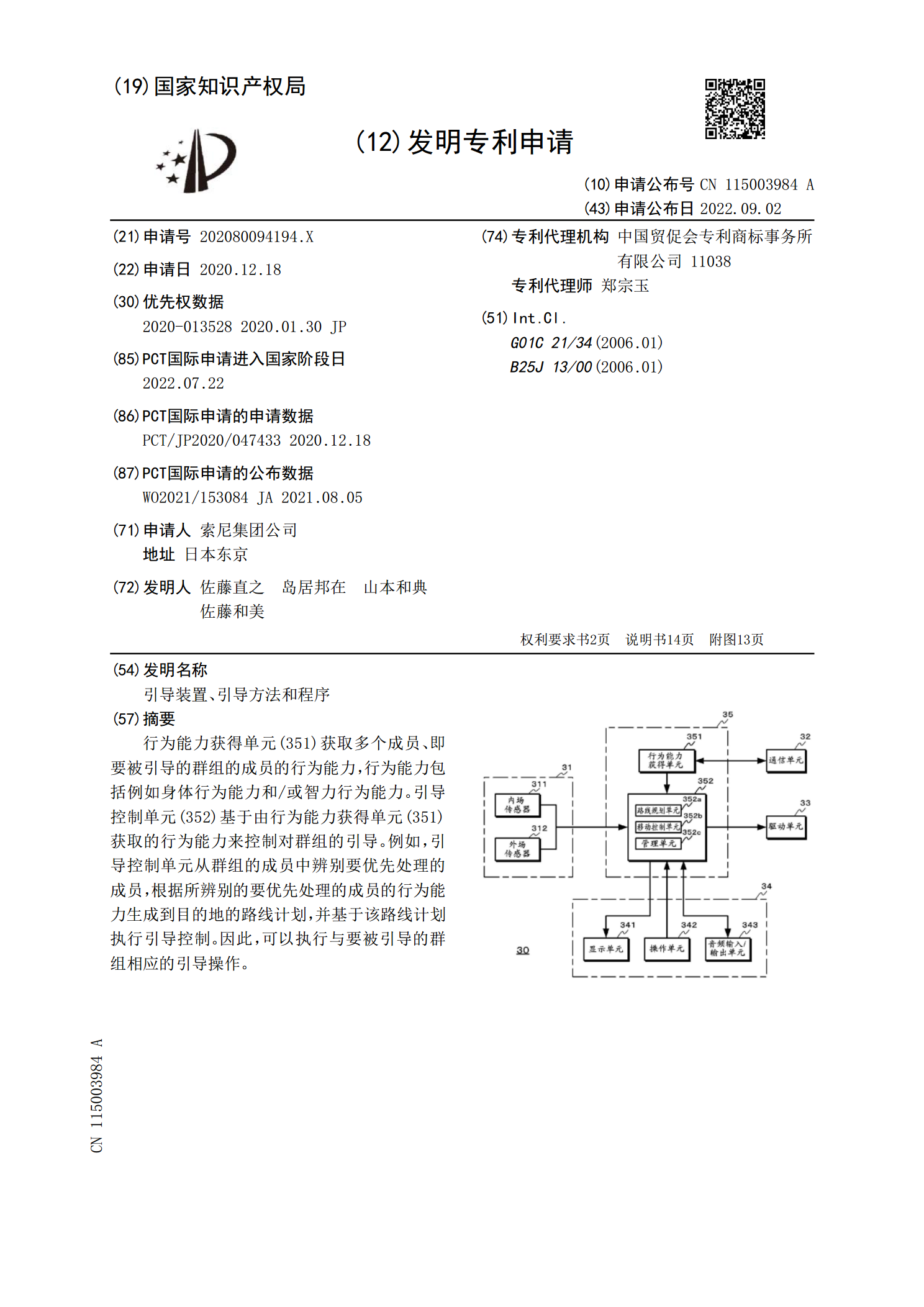
行为能力获得单元(351)获取多个成员、即要被引导的群组的成员的行为能力,行为能力包括例如身体行为能力和/或智力行为能力。引导控制单元(352)基于由行为能力获得单元(351)获取的行为能力来控制对群组的引导。例如,引导控制单元从群组的成员中辨别要优先处理的成员,根据所辨别的要优先处理的成员的行为能力生成到目的地的路线计划,并基于该路线计划执行引导控制。因此,可以执行与要被引导的群组相应的引导操作。

路口引导方法及路口引导装置.pdf
本发明涉及导航领域。具体涉及一种路口引导方法,其包括:当用户正在接近路口时,生成路口引导视图,路口引导视图包括道路图示、指示用于推荐路径的路径图示以及显示用户的实时位置的用户位置图标;其中,在为了到达目的地将要相继穿过三个紧邻的路口的情况下,当用户正在接近所述三个紧邻的路口中的第一路口时,生成用于引导穿过第一路口和第二路口的第一路口引导视图,一旦用户穿过第一路口,则将第一路口引导视图切换成用于引导穿过第二路口和第三路口的第二路口引导视图。本发明还涉及一种相应的路口引导装置。本发明的路口引导方案能同时显示具
语音引导方法、装置、智能设备及服务器.pdf
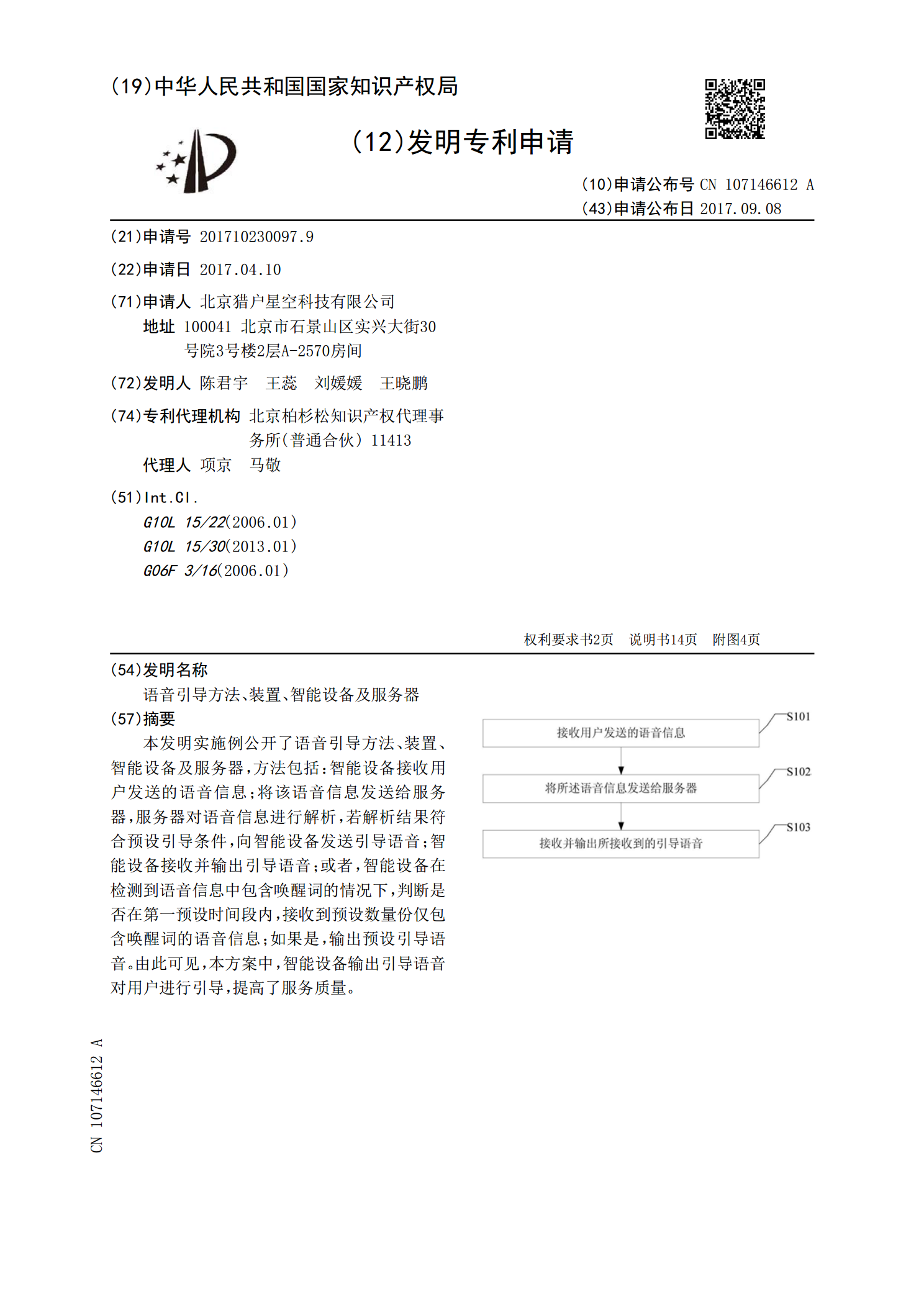
本发明实施例公开了语音引导方法、装置、智能设备及服务器,方法包括:智能设备接收用户发送的语音信息;将该语音信息发送给服务器,服务器对语音信息进行解析,若解析结果符合预设引导条件,向智能设备发送引导语音;智能设备接收并输出引导语音;或者,智能设备在检测到语音信息中包含唤醒词的情况下,判断是否在第一预设时间段内,接收到预设数量份仅包含唤醒词的语音信息;如果是,输出预设引导语音。由此可见,本方案中,智能设备输出引导语音对用户进行引导,提高了服务质量。