
一种多功能水果辅助采摘组合装置.pdf

一条****ee


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多功能水果辅助采摘组合装置.pdf
一种多功能水果辅助采摘组合装置,主要包括小车、人字梯、果筐架、锁止机构、限速机构、底座等。人字梯一侧单梯设有导轨I,果筐架可沿其上下运动,以运输水果;另一侧单梯装有连接杆,可将两单梯连接成长直梯;锁止机构包含锁和电机控制开关,果筐架上升至人字梯顶部时,锁结构触碰电机控制开关,自动关闭电机,并将果筐架锁止于人字梯顶部,便于水果装筐;限速机构附有楔形块,当果筐架运输水果下降速度过快时,楔形块与卷筒啮合摩擦,以实现减速;人字梯腿部限位销与底座上的限位槽配合,以调节高度并固定人字梯;小车侧挡板与前挡板可打开与关闭
一种水果辅助采摘装置.pdf
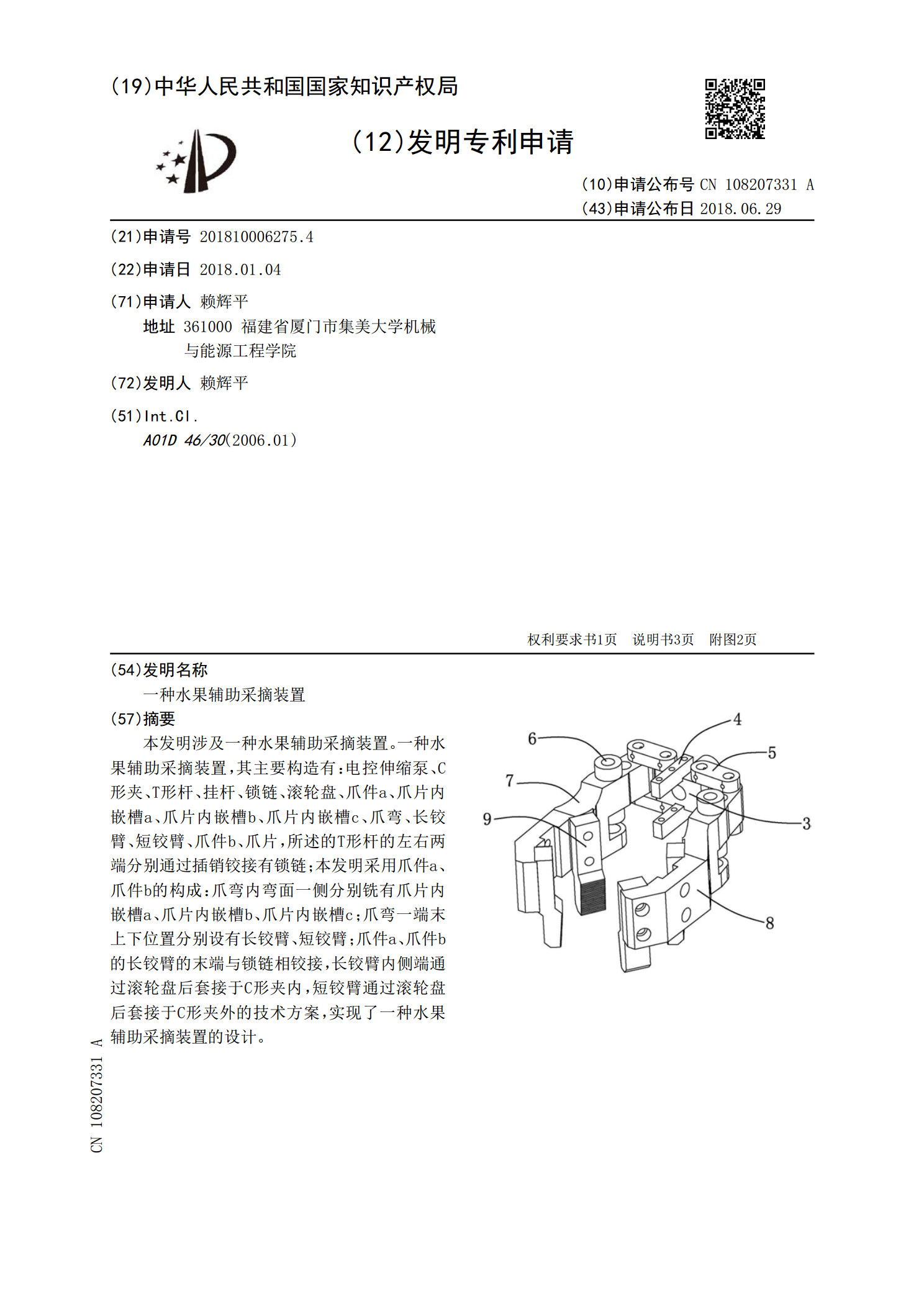
本发明涉及一种水果辅助采摘装置。一种水果辅助采摘装置,其主要构造有:电控伸缩泵、C形夹、T形杆、挂杆、锁链、滚轮盘、爪件a、爪片内嵌槽a、爪片内嵌槽b、爪片内嵌槽c、爪弯、长铰臂、短铰臂、爪件b、爪片,所述的T形杆的左右两端分别通过插销铰接有锁链;本发明采用爪件a、爪件b的构成:爪弯内弯面一侧分别铣有爪片内嵌槽a、爪片内嵌槽b、爪片内嵌槽c;爪弯一端末上下位置分别设有长铰臂、短铰臂;爪件a、爪件b的长铰臂的末端与锁链相铰接,长铰臂内侧端通过滚轮盘后套接于C形夹内,短铰臂通过滚轮盘后套接于C形夹外的技术方案
一种多功能水果采摘装置.pdf
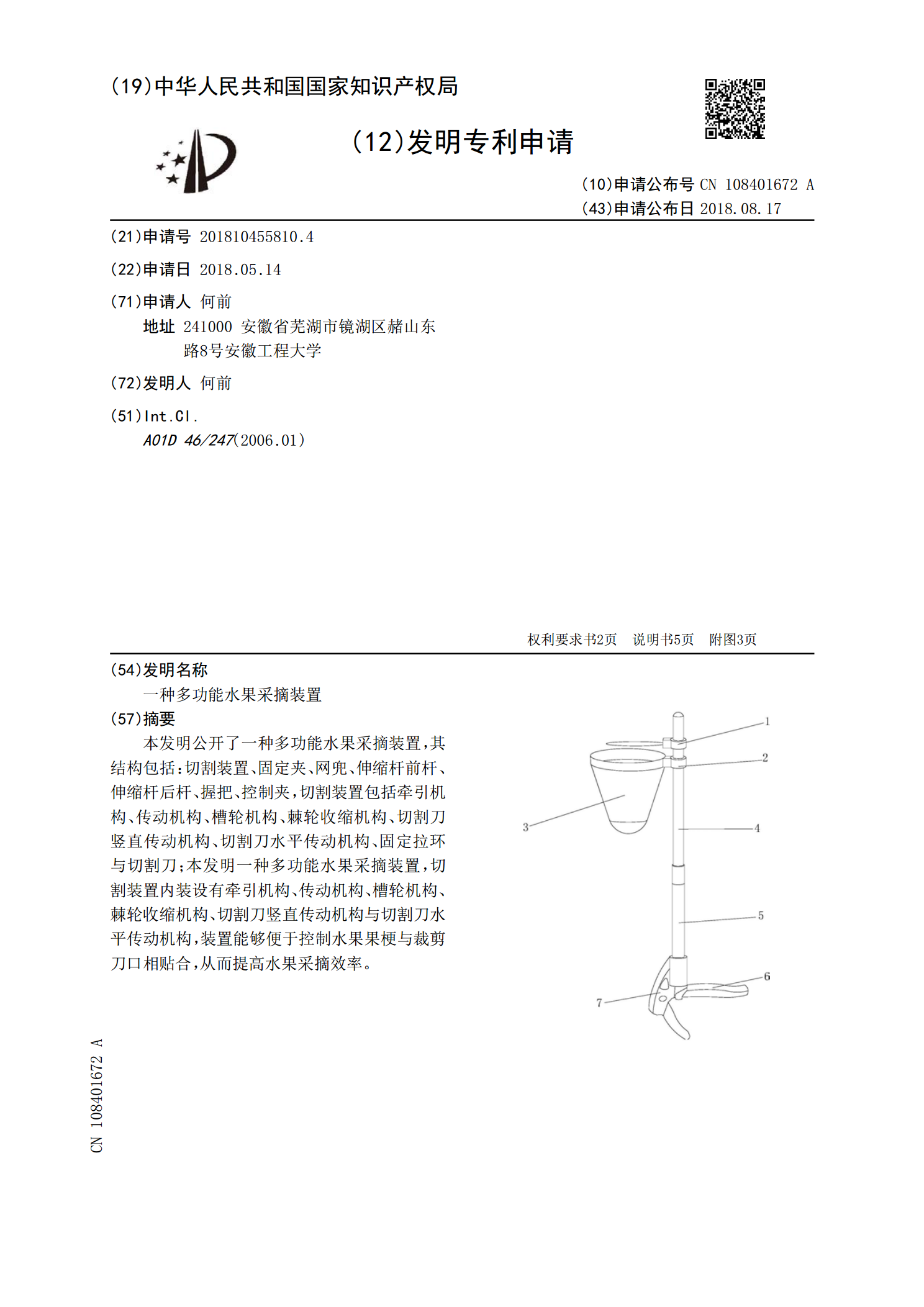
本发明公开了一种多功能水果采摘装置,其结构包括:切割装置、固定夹、网兜、伸缩杆前杆、伸缩杆后杆、握把、控制夹,切割装置包括牵引机构、传动机构、槽轮机构、棘轮收缩机构、切割刀竖直传动机构、切割刀水平传动机构、固定拉环与切割刀;本发明一种多功能水果采摘装置,切割装置内装设有牵引机构、传动机构、槽轮机构、棘轮收缩机构、切割刀竖直传动机构与切割刀水平传动机构,装置能够便于控制水果果梗与裁剪刀口相贴合,从而提高水果采摘效率。
一种水果种植用辅助采摘装置.pdf
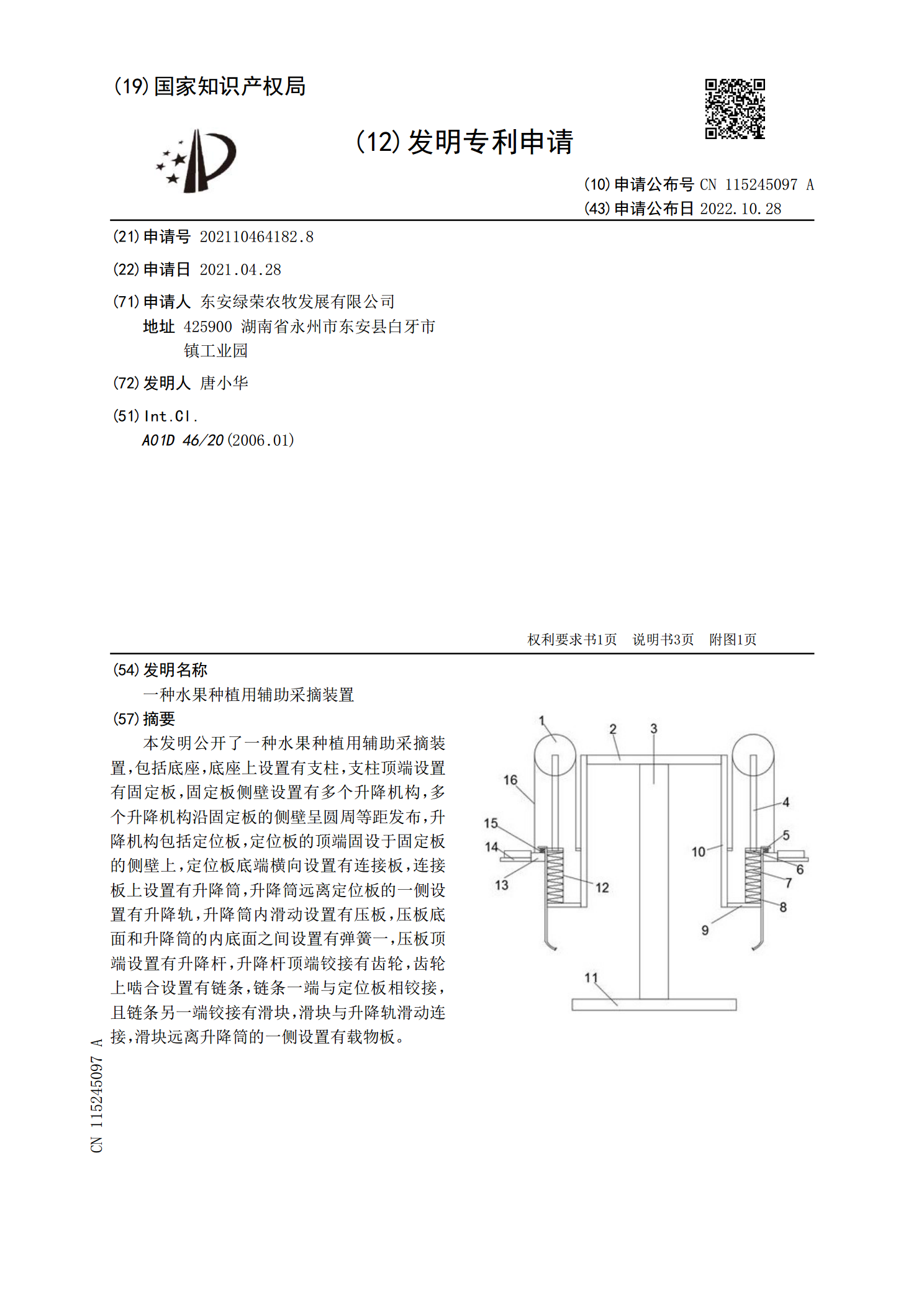
本发明公开了一种水果种植用辅助采摘装置,包括底座,底座上设置有支柱,支柱顶端设置有固定板,固定板侧壁设置有多个升降机构,多个升降机构沿固定板的侧壁呈圆周等距发布,升降机构包括定位板,定位板的顶端固设于固定板的侧壁上,定位板底端横向设置有连接板,连接板上设置有升降筒,升降筒远离定位板的一侧设置有升降轨,升降筒内滑动设置有压板,压板底面和升降筒的内底面之间设置有弹簧一,压板顶端设置有升降杆,升降杆顶端铰接有齿轮,齿轮上啮合设置有链条,链条一端与定位板相铰接,且链条另一端铰接有滑块,滑块与升降轨滑动连接,滑块远

一种水果种植用辅助采摘装置.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN114080899A(43)申请公布日2022.02.25(21)申请号CN202111328431.7(22)申请日2021.11.10(71)申请人衡阳市绿荫生态农业有限公司地址421200湖南省衡阳市衡阳县集兵镇大利村松木组(72)发明人任福生刘宏英蒋科(74)专利代理机构43259湖南中泽专利代理事务所(普通合伙)代理人杨筠(51)Int.CIA01D46/20(20060101)B07B9/00(20060101)A