
一种磁控微针穿刺施药胶囊.pdf

代瑶****zy


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种磁控微针穿刺施药胶囊.pdf
本发明公开了一种磁控微针穿刺施药胶囊,包括壳体部、磁驱部、内窥镜装置、施药装置;其中,所述壳体部由承载壳体和施药壳体组成;所述磁驱部主体为环形永磁铁;所述内窥镜装置包括内窥镜镜头、镜片以及电路板,分别设置在承载壳体的啮合处与磁体的啮合处;所述施药装置包括施药微针、触发塞及固化压缩弹簧,固化压缩弹簧在复原时将活塞推出,顶出微针对患处进行穿刺施药治疗。本发明所提供的磁控胶囊在实现指定位置穿刺施药的功能外可通过内窥镜进行视觉辅助操控;医生通过磁控引导胶囊运动到施药区,通过内窥镜获取到图像信息,确定施药位置,随后
一种磁控式抗干扰靶向施药胶囊机器人.pdf
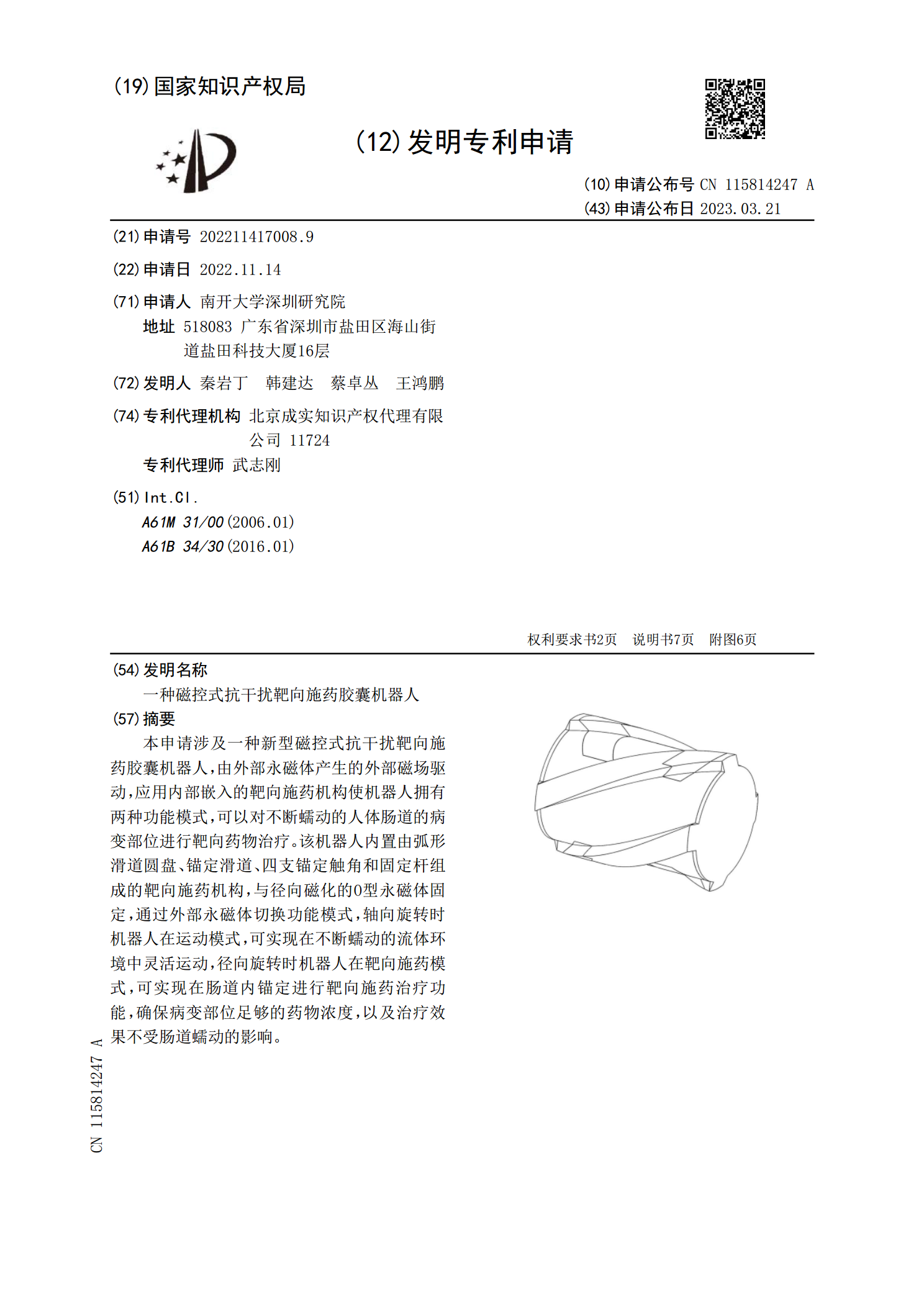
本申请涉及一种新型磁控式抗干扰靶向施药胶囊机器人,由外部永磁体产生的外部磁场驱动,应用内部嵌入的靶向施药机构使机器人拥有两种功能模式,可以对不断蠕动的人体肠道的病变部位进行靶向药物治疗。该机器人内置由弧形滑道圆盘、锚定滑道、四支锚定触角和固定杆组成的靶向施药机构,与径向磁化的O型永磁体固定,通过外部永磁体切换功能模式,轴向旋转时机器人在运动模式,可实现在不断蠕动的流体环境中灵活运动,径向旋转时机器人在靶向施药模式,可实现在肠道内锚定进行靶向施药治疗功能,确保病变部位足够的药物浓度,以及治疗效果不受肠道蠕动
磁控胶囊内窥镜的蜂针式介入注射器.pdf
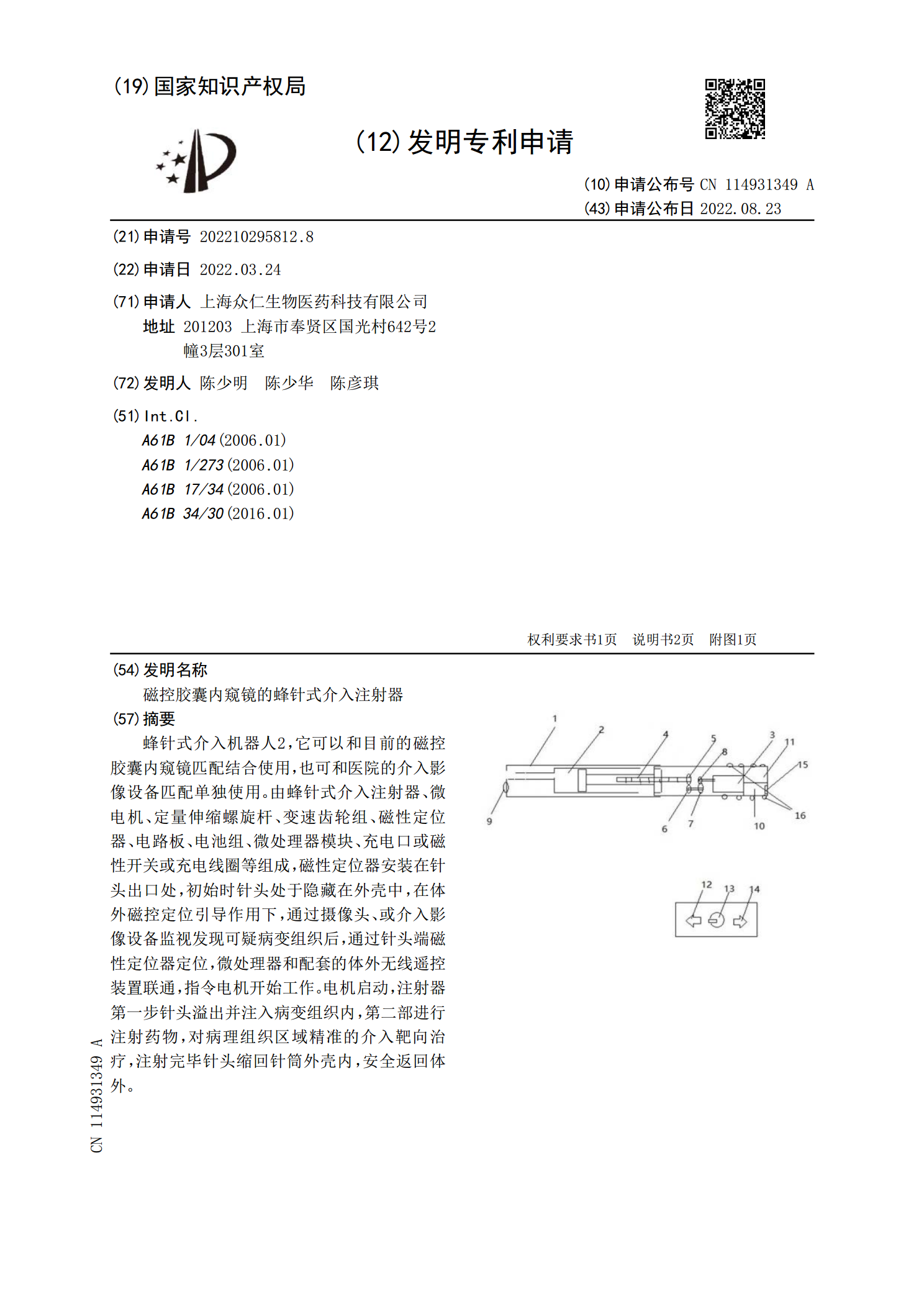
蜂针式介入机器人2,它可以和目前的磁控胶囊内窥镜匹配结合使用,也可和医院的介入影像设备匹配单独使用。由蜂针式介入注射器、微电机、定量伸缩螺旋杆、变速齿轮组、磁性定位器、电路板、电池组、微处理器模块、充电口或磁性开关或充电线圈等组成,磁性定位器安装在针头出口处,初始时针头处于隐藏在外壳中,在体外磁控定位引导作用下,通过摄像头、或介入影像设备监视发现可疑病变组织后,通过针头端磁性定位器定位,微处理器和配套的体外无线遥控装置联通,指令电机开始工作。电机启动,注射器第一步针头溢出并注入病变组织内,第二部进行注射药
一种智能磁控胶囊透镜.pdf
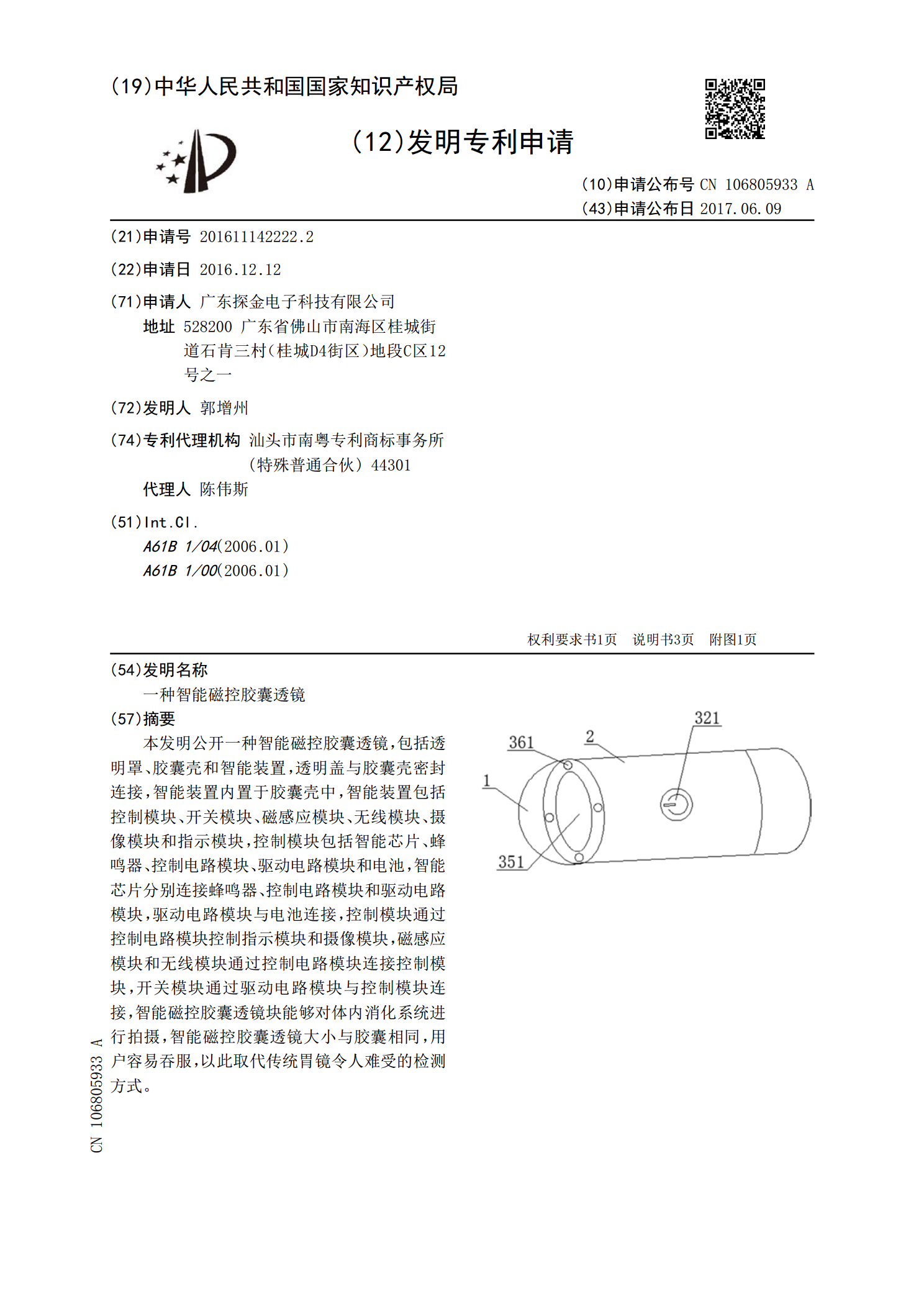
本发明公开一种智能磁控胶囊透镜,包括透明罩、胶囊壳和智能装置,透明盖与胶囊壳密封连接,智能装置内置于胶囊壳中,智能装置包括控制模块、开关模块、磁感应模块、无线模块、摄像模块和指示模块,控制模块包括智能芯片、蜂鸣器、控制电路模块、驱动电路模块和电池,智能芯片分别连接蜂鸣器、控制电路模块和驱动电路模块,驱动电路模块与电池连接,控制模块通过控制电路模块控制指示模块和摄像模块,磁感应模块和无线模块通过控制电路模块连接控制模块,开关模块通过驱动电路模块与控制模块连接,智能磁控胶囊透镜块能够对体内消化系统进行拍摄,智

一种磁控自封式静脉留置针.pdf
本发明涉及一种自封式静脉留置针,它主要由留置导管(1)、针座(2)、钢针芯(3)、钢针芯隔离塞(4)、磁阀滑块(5)、磁阀滑槽(6)、阀孔(7)、操控磁铁(8)组成;本发明双腔管自封式静脉留置针操作极其简单,在留置针敷贴完整的情况下完成封管,无任何污染物进入,持续使用6天以上无任何静脉二次损伤、漏液、静脉炎、静脉血栓等并发症,病人舒适。没有消耗一次性注射器、冲洗器,节省护理操作步骤,提高护理效率和质量。