
一种用于物料输送轨道的智能巡检机器人.pdf

努力****亚捷


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于物料输送轨道的智能巡检机器人.pdf
本发明公开了一种用于物料输送轨道的智能巡检机器人,涉及巡检机器人技术领域。该智能巡检机器人安装在物料输送机构处;物料输送机构包括两旋转内齿带;智能巡检机器人包括行走机器本体,行走机器本体两内侧面均安装有伸缩部件,伸缩部件一端固定有物料校位板;行走机器本体两内侧面通过移动台固定有双向啮合柱,双向啮合柱介于旋转内齿带内部且两者相啮合。本发明通过在物料输送带两侧设置旋转内齿带,利用旋转内齿带与行走机器本体上的双向啮合柱的配合作用,在物料输送带的运动下带动巡检机器人的同步行走移动,无需依靠巡检机器人自身的动力进行
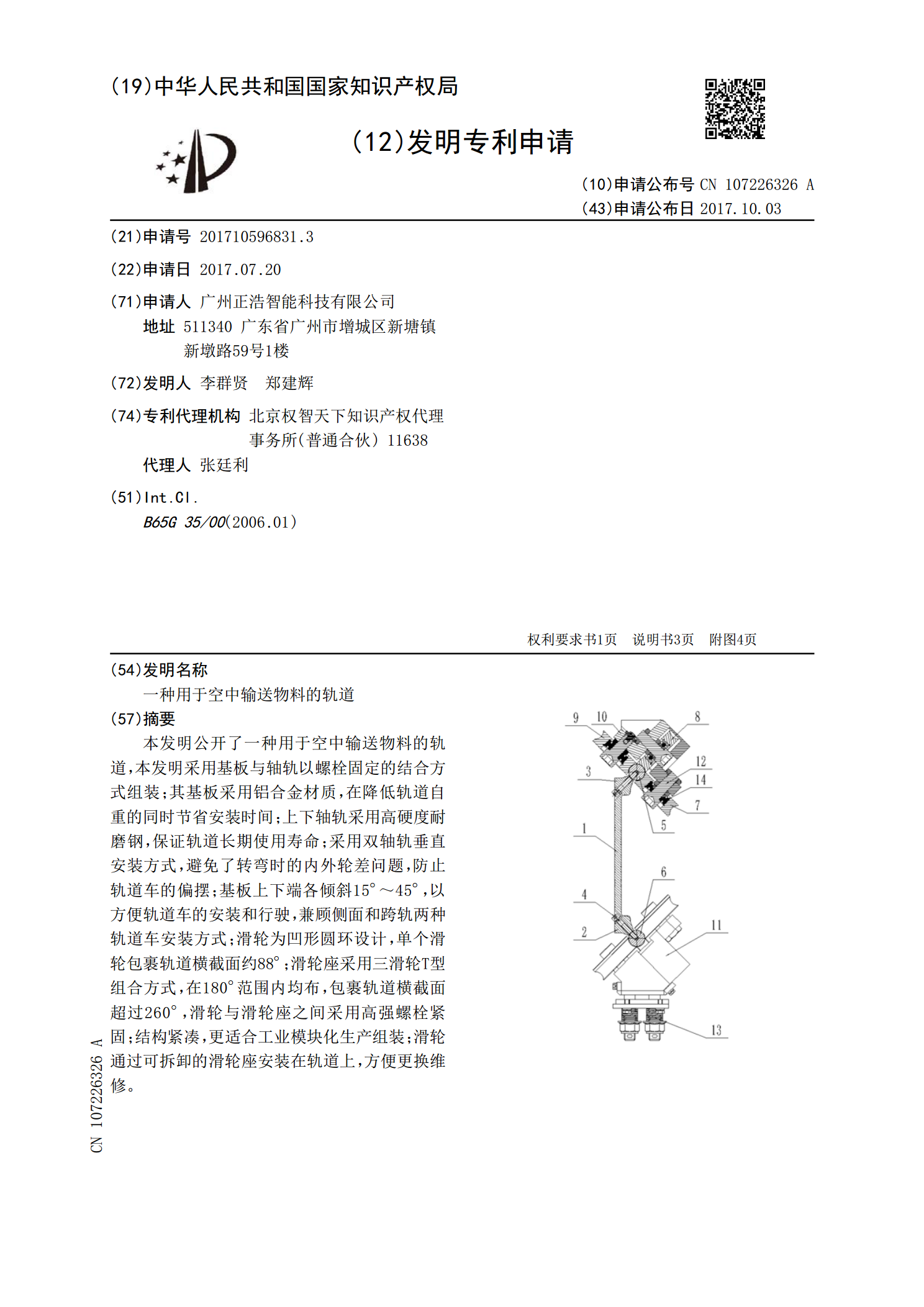
一种用于空中输送物料的轨道.pdf
本发明公开了一种用于空中输送物料的轨道,本发明采用基板与轴轨以螺栓固定的结合方式组装;其基板采用铝合金材质,在降低轨道自重的同时节省安装时间;上下轴轨采用高硬度耐磨钢,保证轨道长期使用寿命;采用双轴轨垂直安装方式,避免了转弯时的内外轮差问题,防止轨道车的偏摆;基板上下端各倾斜15°~45°,以方便轨道车的安装和行驶,兼顾侧面和跨轨两种轨道车安装方式;滑轮为凹形圆环设计,单个滑轮包裹轨道横截面约88°;滑轮座采用三滑轮T型组合方式,在180°范围内均布,包裹轨道横截面超过260°,滑轮与滑轮座之间采用高强螺
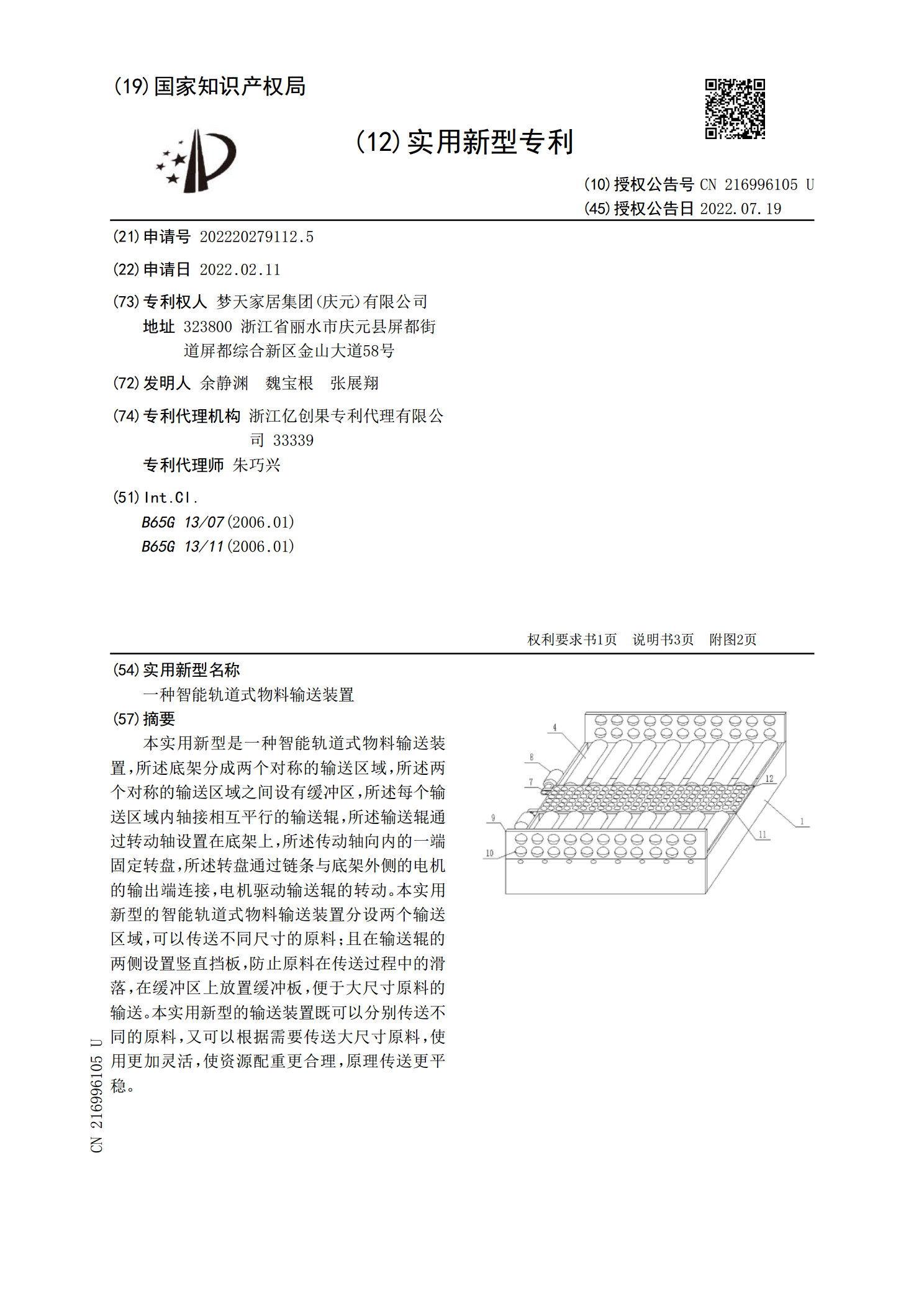
一种智能轨道式物料输送装置.pdf
本实用新型是一种智能轨道式物料输送装置,所述底架分成两个对称的输送区域,所述两个对称的输送区域之间设有缓冲区,所述每个输送区域内轴接相互平行的输送辊,所述输送辊通过转动轴设置在底架上,所述传动轴向内的一端固定转盘,所述转盘通过链条与底架外侧的电机的输出端连接,电机驱动输送辊的转动。本实用新型的智能轨道式物料输送装置分设两个输送区域,可以传送不同尺寸的原料;且在输送辊的两侧设置竖直挡板,防止原料在传送过程中的滑落,在缓冲区上放置缓冲板,便于大尺寸原料的输送。本实用新型的输送装置既可以分别传送不同的原料,又可

一种用于轨道交通智能巡检机器人的自检系统.pdf
本发明公开了一种用于轨道交通智能巡检机器人的自检系统,包括用于采集智能巡检机器人(1)运动状态数据和轨道(2)的轨道表面数据的数据采集模块(100),用于进行数据处理的第一数据处理模块(200)、第二数据处理模块(300),用于生成预警信号和报警信号的站台控制模块(400),用于汇总预警信号和报警信号的中央控制模块(500),用于存储和标准数据的存储器模块(600)、站台数据库模块(700)、中央数据库模块(800)和用于反馈预警信号和报警信号的站台显示模块(900)、中央显示模块(1000)。本发明能够
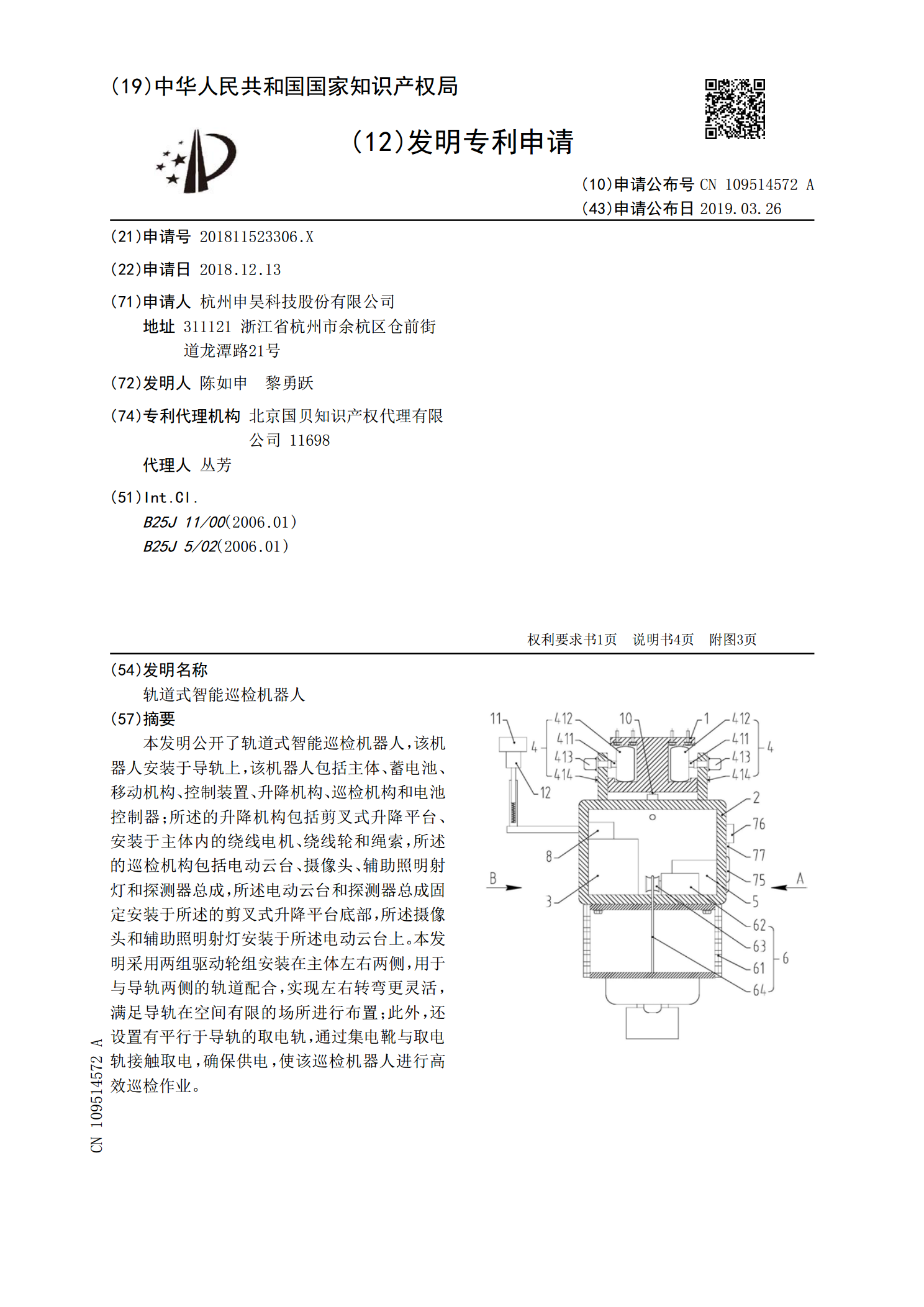
轨道式智能巡检机器人.pdf
本发明公开了轨道式智能巡检机器人,该机器人安装于导轨上,该机器人包括主体、蓄电池、移动机构、控制装置、升降机构、巡检机构和电池控制器;所述的升降机构包括剪叉式升降平台、安装于主体内的绕线电机、绕线轮和绳索,所述的巡检机构包括电动云台、摄像头、辅助照明射灯和探测器总成,所述电动云台和探测器总成固定安装于所述的剪叉式升降平台底部,所述摄像头和辅助照明射灯安装于所述电动云台上。本发明采用两组驱动轮组安装在主体左右两侧,用于与导轨两侧的轨道配合,实现左右转弯更灵活,满足导轨在空间有限的场所进行布置;此外,还设置有