
一种纯电动自卸车取力器抖动啮合控制方法及存储介质.pdf

英哲****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种纯电动自卸车取力器抖动啮合控制方法及存储介质.pdf
本发明公开了一种纯电动自卸车取力器抖动啮合控制方法及存储介质,定义整车控制器VCU的控制程序周期为t

一种纯电动车用变速箱取力器系统及其控制方法.pdf
一种纯电动车用变速箱取力器系统及其控制方法,系统包括连接在一起的电机和变速箱,电机输出转速即变速箱输入转速,电机上有旋变接口并内置电机转速传感器,采集到的电机转速即变速箱输入转速,变速箱上设置输出轴转速传感器;电机转速传感器与输出轴转速传感器连接TCU;变速箱中间轴与变速箱输入轴常啮合,变速箱中间轴连接取力器,取力器上有取力器压力开关,取力器压力开关与TCU连接;取力器挂档通过内置的气缸使能,气缸进气受控于取力器进气电磁阀,取力器进气电磁阀的开闭受控于TCU发送的使能信号。TCU根据取力器压力开关、换挡手

自卸车取力器安全控制系统及方法.pdf
本发明公开了一种自卸车取力器安全控制系统及方法,包括取力器、安全控制模块、取力器控制开关、发动机转速传感器、发动机ECU、报警装置、显示器;所述取力器的输出轴与液压举升系统的齿轮泵连接;所述安全控制模块分别与取力器控制开关、报警装置、显示器连接。本发明提供的一种自卸车取力器安全控制系统及方法,可保证自卸车在举升车厢过程中的安全,且可利用液压举升系统的齿轮泵的转速来限定发动机的转速,提高自卸车的使用寿命。

一种取力器控制方法和电动汽车.pdf
本发明提供一种取力器控制方法和电动汽车,属于电动汽车技术领域。该方法包括:获取整车ready信号、电机转速、变速箱输出转速和取力器开关信号;当所述整车ready信号有效、所述电机转速小于第一设定转速、所述变速箱输出转速小于第二设定转速且所述取力器开关信号有效时,控制取力器与电机啮合。由于取力器与电机啮合通过取力器与变速箱的中间轴啮合来实现,又由于电机的输出轴与变速箱的中间轴始终啮合,那么当控制电机转速不为0时,变速箱的中间轴会处于运动状态,与电机转速为0时变速箱的中间轴处于静止状态相比,取力器与变速箱的中
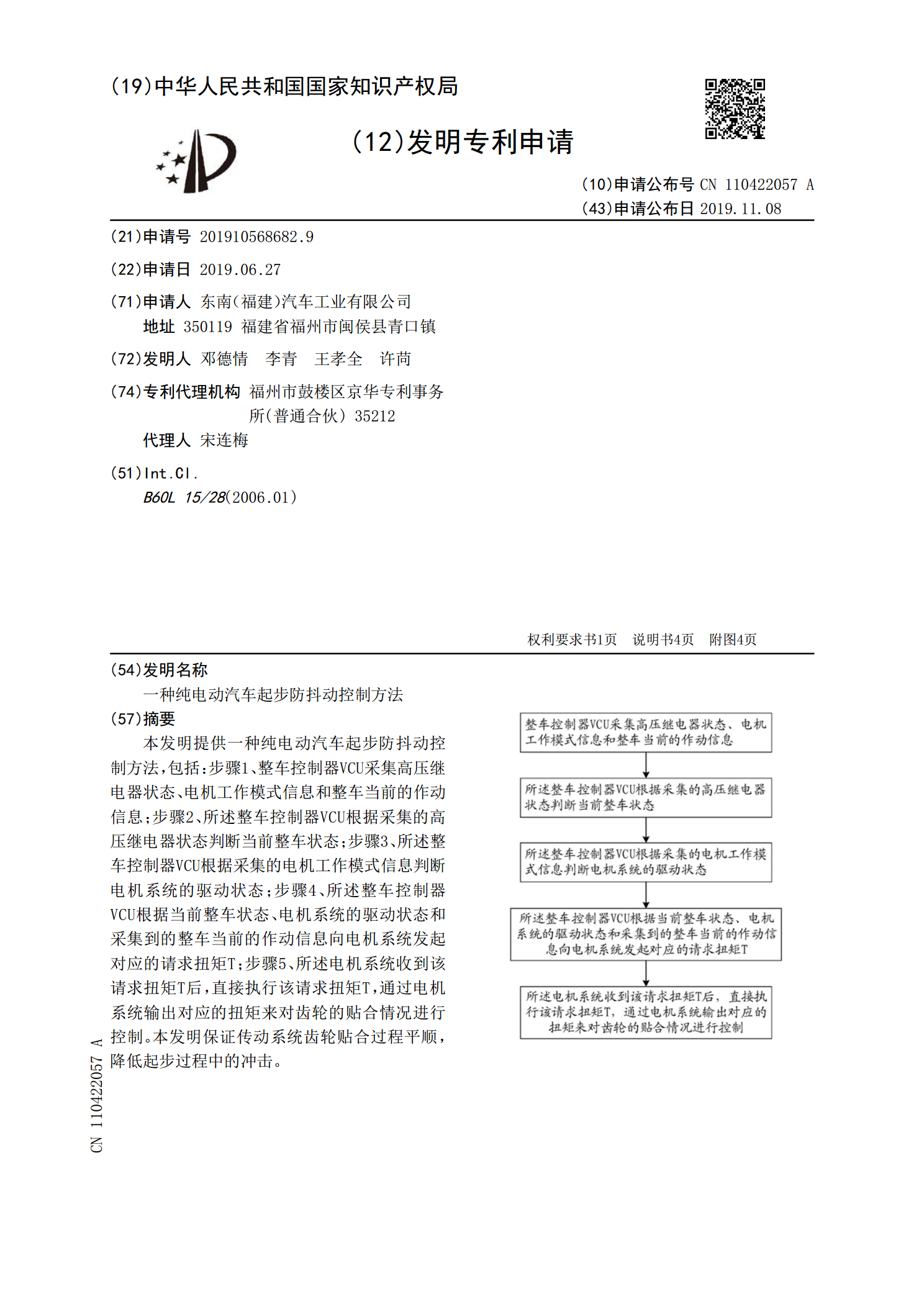
一种纯电动汽车起步防抖动控制方法.pdf
本发明提供一种纯电动汽车起步防抖动控制方法,包括:步骤1、整车控制器VCU采集高压继电器状态、电机工作模式信息和整车当前的作动信息;步骤2、所述整车控制器VCU根据采集的高压继电器状态判断当前整车状态;步骤3、所述整车控制器VCU根据采集的电机工作模式信息判断电机系统的驱动状态;步骤4、所述整车控制器VCU根据当前整车状态、电机系统的驱动状态和采集到的整车当前的作动信息向电机系统发起对应的请求扭矩T;步骤5、所述电机系统收到该请求扭矩T后,直接执行该请求扭矩T,通过电机系统输出对应的扭矩来对齿轮的贴合情况