
六自由度水下球形机器人.pdf

书生****12


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

六自由度水下球形机器人.pdf
本发明公开了一种六自由度水下球形机器人,它包括球形外壳,其内设有长轴、活塞式储水设备,长轴两端固定在两圆形孔内,长轴空腔内仅设有一水下推进器,长轴中部套设旋转方筒,方筒一端设有大齿轮,大齿轮套设固定在长轴上,方筒左侧设有第一电机,第一电机输出轴设有小齿轮,小齿轮与大齿轮齿合,方筒前后侧各活动设有短杆,两短杆对称,每一短杆外端部设有臂摆,每一臂摆下端部设有配重,方筒右侧设有连杆和第二电机,第二电机输出轴、连杆一端的链轮与一短杆的链轮通过一链条相连,连杆另一端的链轮与另一短杆的链轮通过一链条相连,
球形水下机器人.pdf
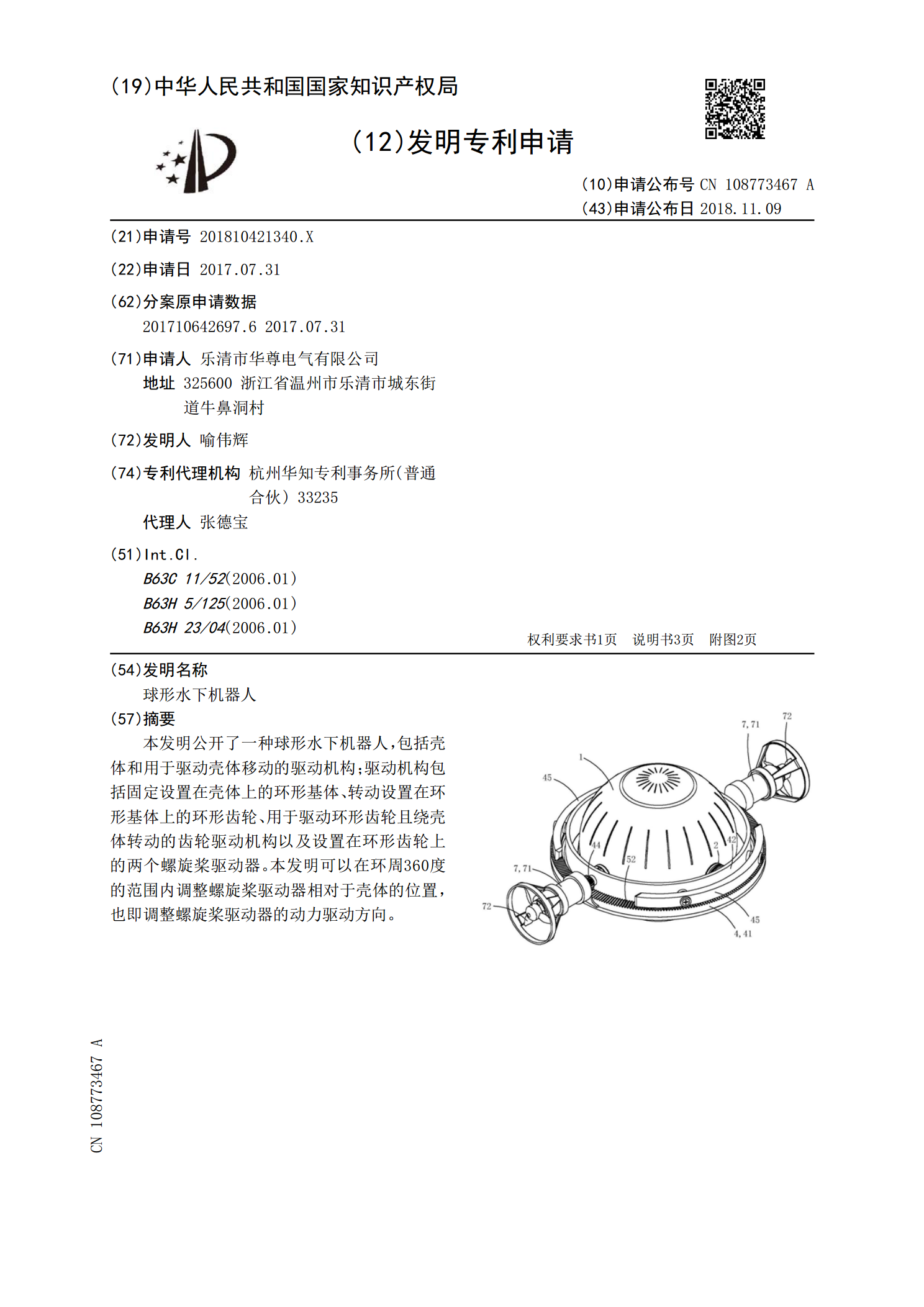
本发明公开了一种球形水下机器人,包括壳体和用于驱动壳体移动的驱动机构;驱动机构包括固定设置在壳体上的环形基体、转动设置在环形基体上的环形齿轮、用于驱动环形齿轮且绕壳体转动的齿轮驱动机构以及设置在环形齿轮上的两个螺旋桨驱动器。本发明可以在环周360度的范围内调整螺旋桨驱动器相对于壳体的位置,也即调整螺旋桨驱动器的动力驱动方向。
球形水下机器人.pdf
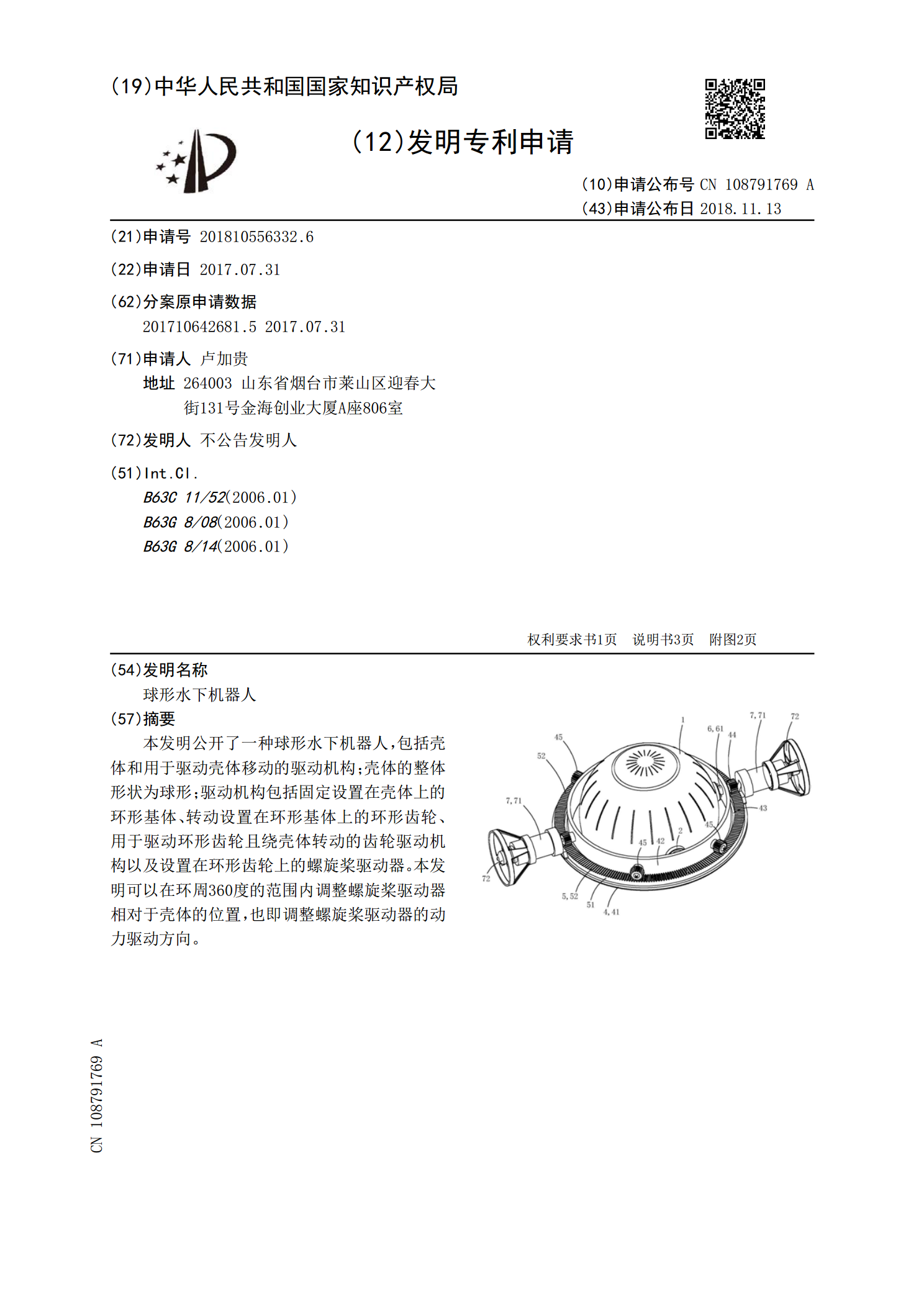
本发明公开了一种球形水下机器人,包括壳体和用于驱动壳体移动的驱动机构;壳体的整体形状为球形;驱动机构包括固定设置在壳体上的环形基体、转动设置在环形基体上的环形齿轮、用于驱动环形齿轮且绕壳体转动的齿轮驱动机构以及设置在环形齿轮上的螺旋桨驱动器。本发明可以在环周360度的范围内调整螺旋桨驱动器相对于壳体的位置,也即调整螺旋桨驱动器的动力驱动方向。
一种水下球形机器人.pdf
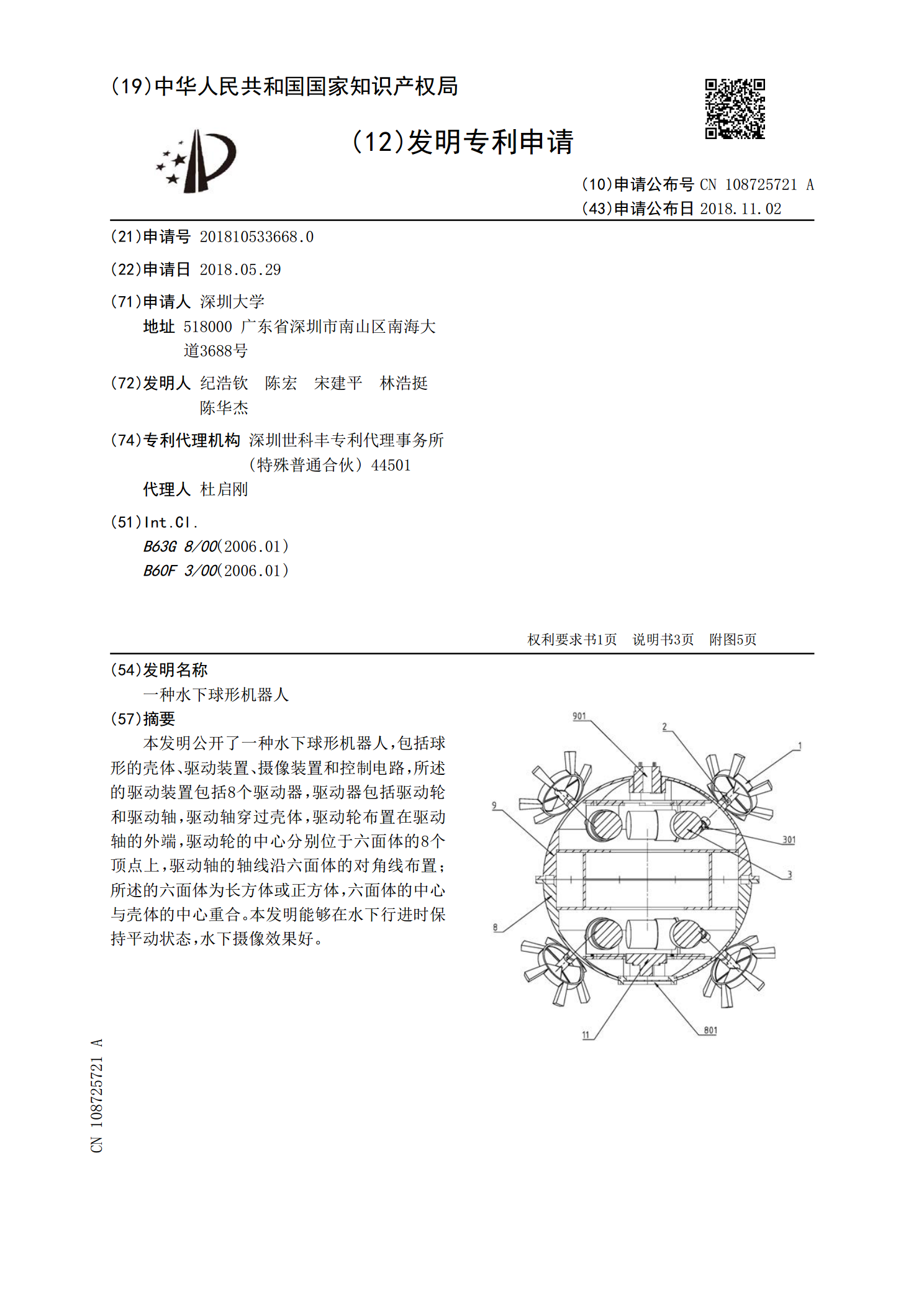
本发明公开了一种水下球形机器人,包括球形的壳体、驱动装置、摄像装置和控制电路,所述的驱动装置包括8个驱动器,驱动器包括驱动轮和驱动轴,驱动轴穿过壳体,驱动轮布置在驱动轴的外端,驱动轮的中心分别位于六面体的8个顶点上,驱动轴的轴线沿六面体的对角线布置;所述的六面体为长方体或正方体,六面体的中心与壳体的中心重合。本发明能够在水下行进时保持平动状态,水下摄像效果好。
竖井掘进用六自由度水下机器人.pdf
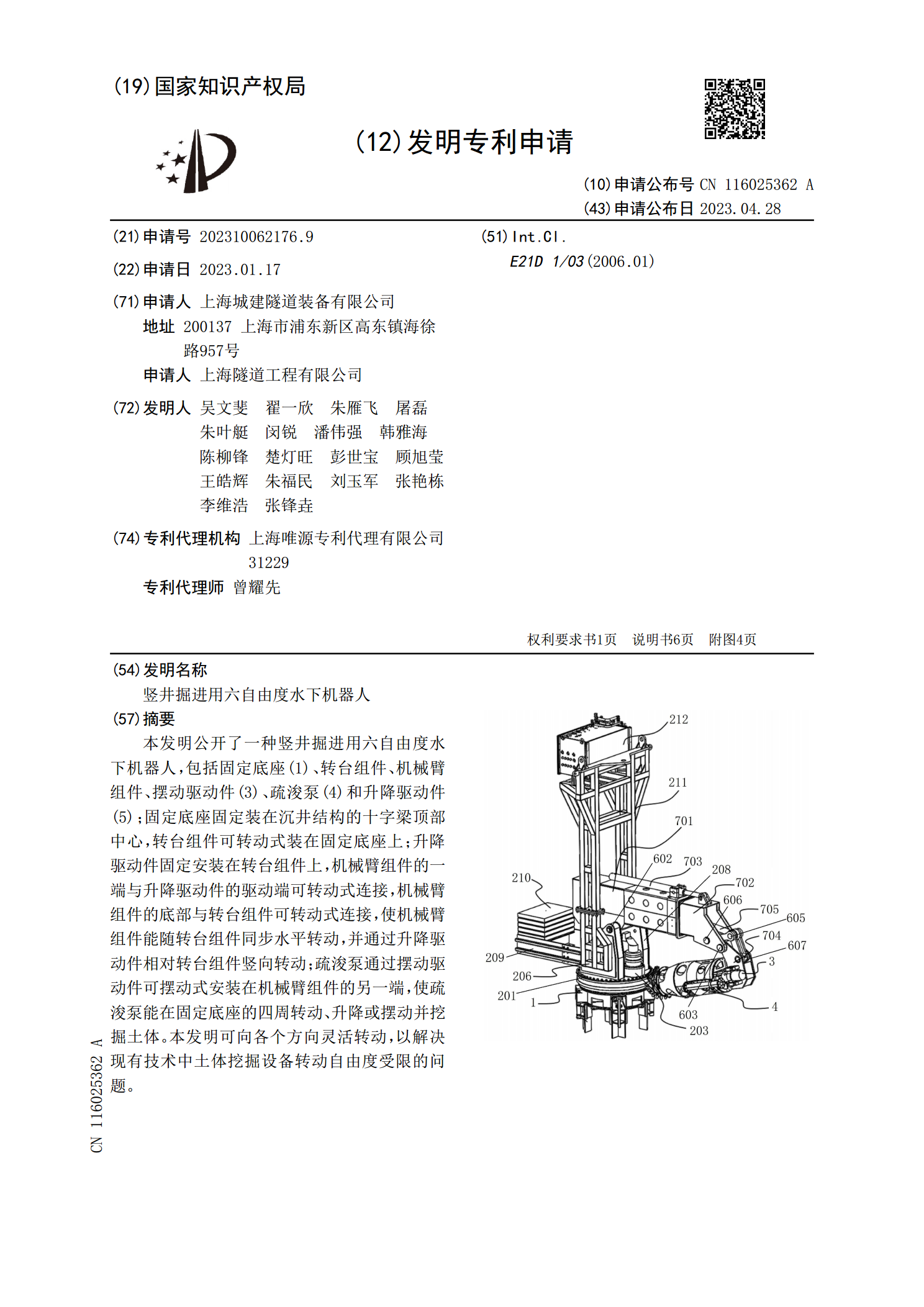
本发明公开了一种竖井掘进用六自由度水下机器人,包括固定底座(1)、转台组件、机械臂组件、摆动驱动件(3)、疏浚泵(4)和升降驱动件(5);固定底座固定装在沉井结构的十字梁顶部中心,转台组件可转动式装在固定底座上;升降驱动件固定安装在转台组件上,机械臂组件的一端与升降驱动件的驱动端可转动式连接,机械臂组件的底部与转台组件可转动式连接,使机械臂组件能随转台组件同步水平转动,并通过升降驱动件相对转台组件竖向转动;疏浚泵通过摆动驱动件可摆动式安装在机械臂组件的另一端,使疏浚泵能在固定底座的四周转动、升降或摆动并挖