
基于滑移率控制的电动车差速转向控制方法.pdf

康佳****文库


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于滑移率控制的电动车差速转向控制方法.pdf
本发明提供一种基于滑移率控制的电动车差速转向控制方法,该方法包括如下步骤:(1)根据轮速传感器测得电动车后轮轮速、驱动电机实际输出力矩,以及车辆的侧向速度;(2)通过两自由度转向模型计算出电动车辆的侧向速度和横摆角速度,再算出四个车轮的侧偏角,从而算出四个车轮的转速;用专门算法实现对轮毂电动车辆的电子差速转向的控制。本发明将转矩分配计算和车轮的滑移率相结合,使得所设计的电子差速转向机构具有差速的同时,还具有差速锁的效果,并具有降速增扭的功能,大大提高了电动车辆行驶通过性和转向性能;在功能上不仅能

一种基于相对滑移率的电动汽车电子差速控制方法研究.docx
一种基于相对滑移率的电动汽车电子差速控制方法研究本论文将重点研究一种基于相对滑移率的电动汽车电子差速控制方法。随着电动汽车的发展和普及,其安全性和动力性逐渐成为人们关注的焦点。在提高电动汽车行驶性能和安全性方面,差速控制技术具有重要作用。本文将从以下几方面对基于相对滑移率的电动汽车电子差速控制方法进行研究:一、电子差速控制技术的概述电子差速控制技术是一种通过对车轮速度和转矩进行控制,从而实现车轮间力的分配和控制的技术。电子差速控制系统可以通过精确调节车轮间的转矩分配,避免车轮间的滑动和侧滑,从而提高车辆的

视觉AGV差速转向控制方法研究.docx
视觉AGV差速转向控制方法研究随着工业自动化的发展,自动导航车(AGV)在工厂内扮演着越来越重要的角色。AGV是一种自动运输车辆,通常用于在工厂内从一个地方到另一个地方运送物品。视觉AGV是一种AGV,它利用机器视觉技术实现自动导航。本文将讨论视觉AGV差速转向控制方法研究。首先,我们先了解一下什么是AGV的差速转向控制。差速转向是一种AGV转向技术,它利用两辆车轮的不同速度来改变车辆的方向。例如,如果左侧的车轮转速较慢,而右侧的车轮转速较快,车辆将向左转。差速转向控制是一种基于此原理的控制技术,用于控制

自动输送小车的差速转向机构及转向控制方法.pdf
本发明提供了自动输送小车的差速转向机构及转向控制方法,底板的顶部四角通过多根支撑柱支撑安装有顶板,所述底板的中心位置安装有转动盘,所述转动盘上对称安装有平行布置的第一轮架板和第二轮架板,所述第一轮架板和第二轮架板之间通过轮轴支撑安装有车轮,在第一轮架板和第二轮架板的顶部通过锁紧螺栓固定安装有第一齿轮盘,所述轮轴上并位于车轮的一侧安装有第一从动锥齿轮,在其另一侧安装有第二从动锥齿轮,所述第一从动锥齿轮与用于驱动其转动的第一传动轮系相配合,所述第二从动锥齿轮与用于驱动其转动的第二传动轮系相配合,所述第一传动轮
轮边驱动转向差速控制方法、控制装置、设备及汽车.pdf
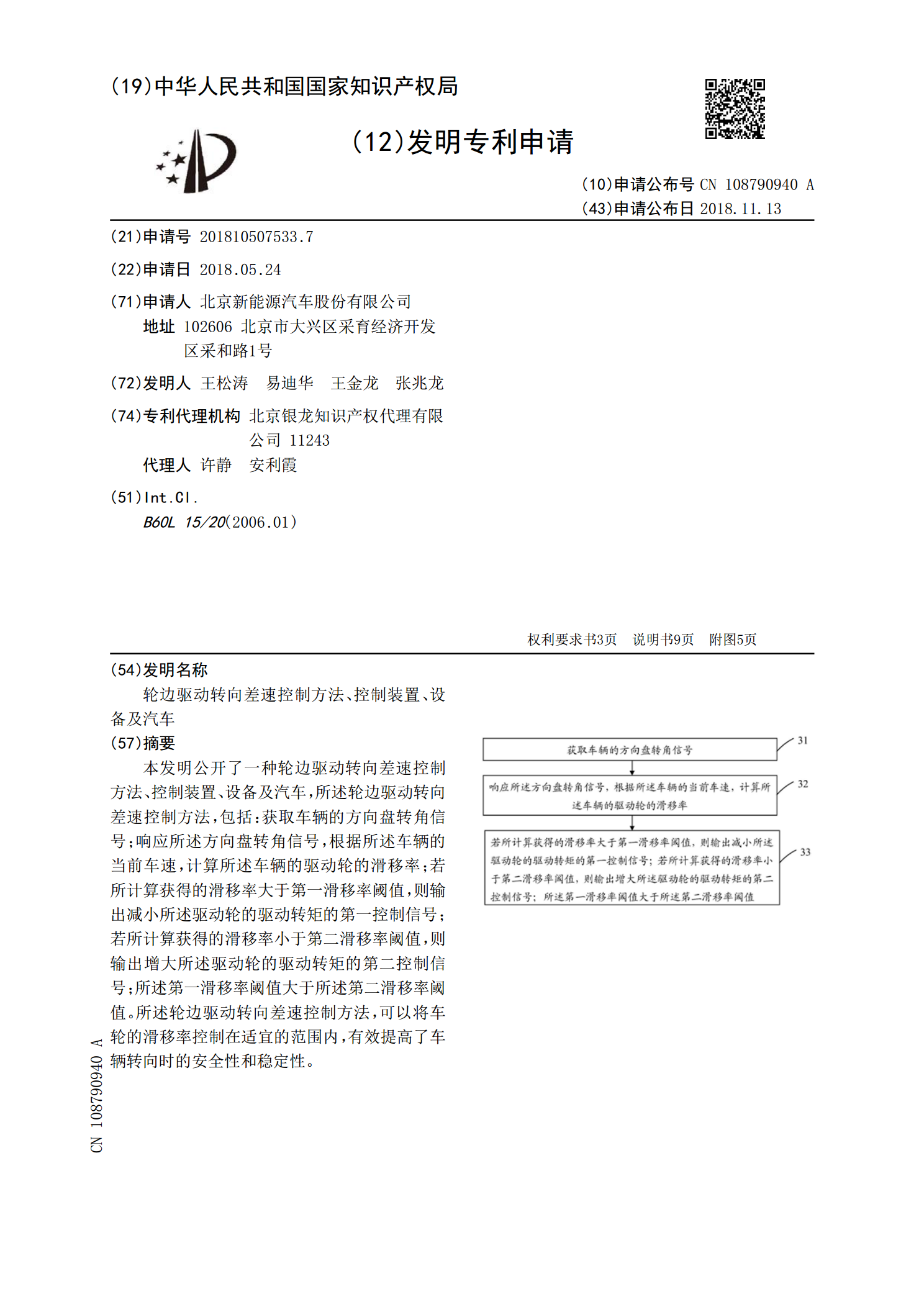
本发明公开了一种轮边驱动转向差速控制方法、控制装置、设备及汽车,所述轮边驱动转向差速控制方法,包括:获取车辆的方向盘转角信号;响应所述方向盘转角信号,根据所述车辆的当前车速,计算所述车辆的驱动轮的滑移率;若所计算获得的滑移率大于第一滑移率阈值,则输出减小所述驱动轮的驱动转矩的第一控制信号;若所计算获得的滑移率小于第二滑移率阈值,则输出增大所述驱动轮的驱动转矩的第二控制信号;所述第一滑移率阈值大于所述第二滑移率阈值。所述轮边驱动转向差速控制方法,可以将车轮的滑移率控制在适宜的范围内,有效提高了车辆转向时的安