
一种智能移动机械臂控制系统.pdf

永梅****33


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能移动机械臂控制系统.pdf
本发明涉及一种智能移动机械臂控制系统。现有的控制系统层次性、结构性、远程操作性差。本发明中的便携式计算机与嵌入式工控计算机信号连接,激光传感器、全球定位系统、三维数字罗盘、USB/CAN总线、图像采集卡、无线摄像机和网络交换机分别与嵌入式工控计算机信号连接;云台摄像头与图像采集卡信号连接,无线访问节点与网络交换机信号连接;自主导航小车控制器、手臂区域控制器、手臂关节模块分别与USB/CAN总线信号连接,陀螺仪、超声波传感器、碰撞开关和左右轮电机伺服驱动器分别与自主导航小车控制器信号连接。本发明能够分别对自
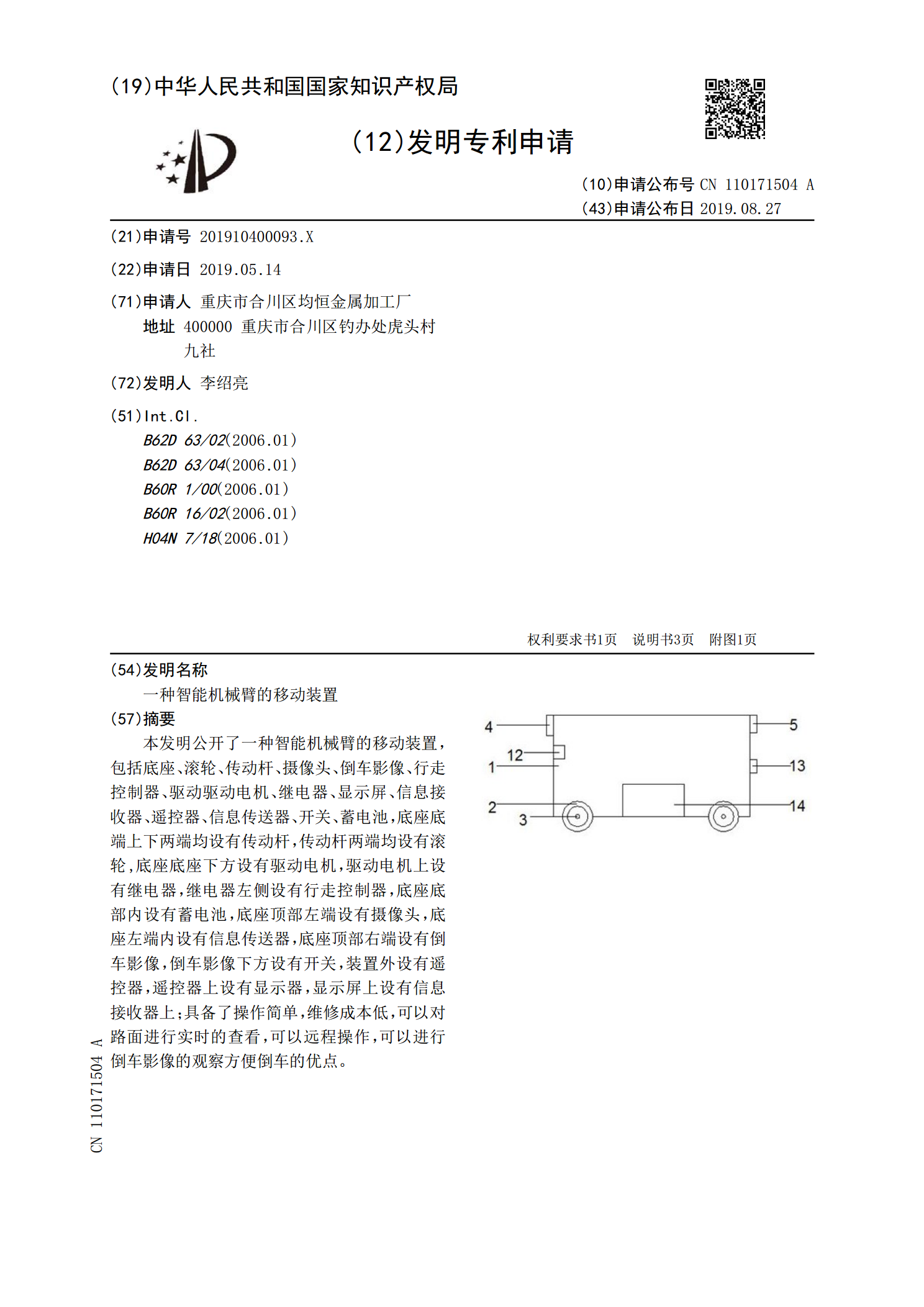
一种智能机械臂的移动装置.pdf
本发明公开了一种智能机械臂的移动装置,包括底座、滚轮、传动杆、摄像头、倒车影像、行走控制器、驱动驱动电机、继电器、显示屏、信息接收器、遥控器、信息传送器、开关、蓄电池,底座底端上下两端均设有传动杆,传动杆两端均设有滚轮,底座底座下方设有驱动电机,驱动电机上设有继电器,继电器左侧设有行走控制器,底座底部内设有蓄电池,底座顶部左端设有摄像头,底座左端内设有信息传送器,底座顶部右端设有倒车影像,倒车影像下方设有开关,装置外设有遥控器,遥控器上设有显示器,显示屏上设有信息接收器上;具备了操作简单,维修成本低,可以
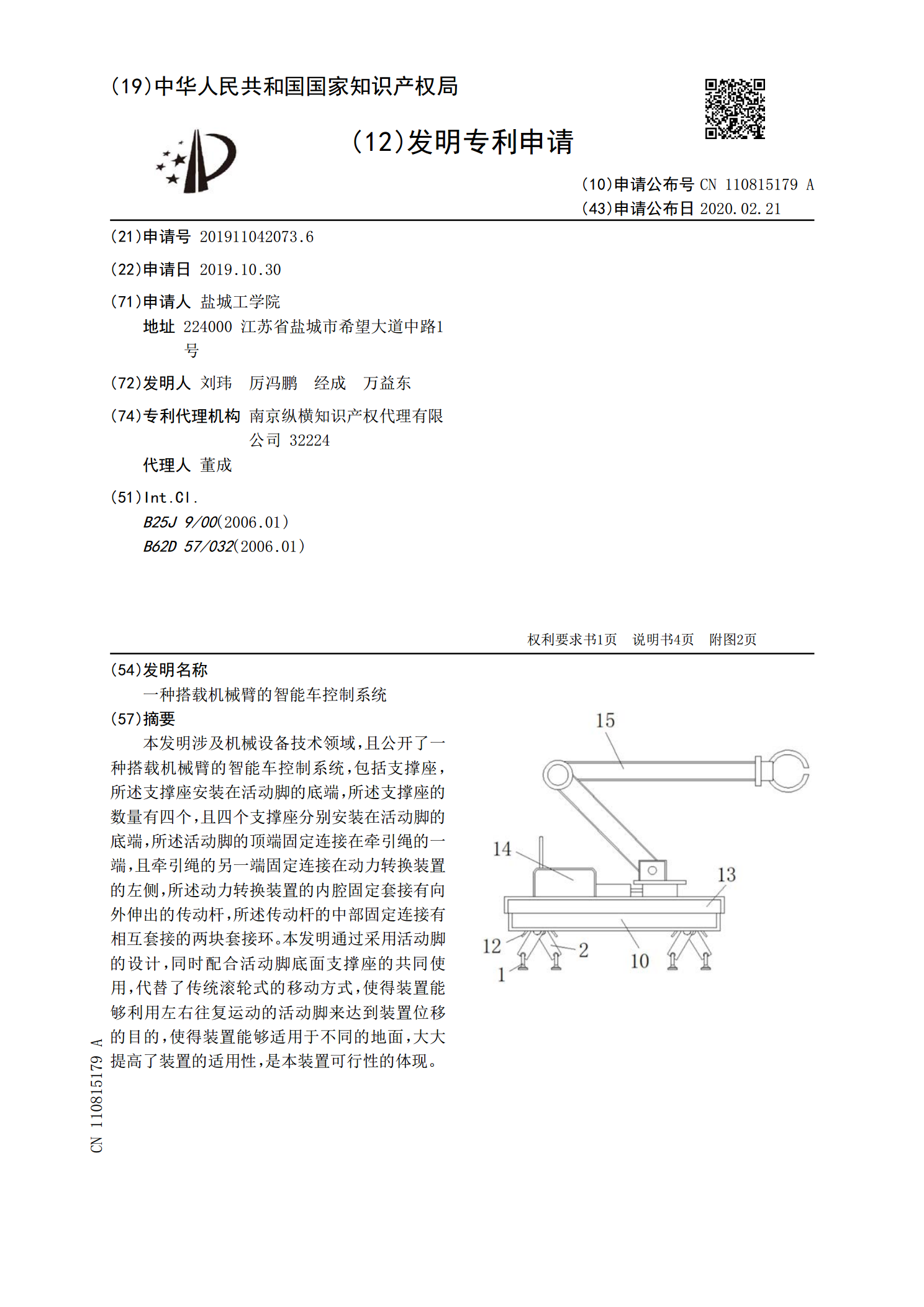
一种搭载机械臂的智能车控制系统.pdf
本发明涉及机械设备技术领域,且公开了一种搭载机械臂的智能车控制系统,包括支撑座,所述支撑座安装在活动脚的底端,所述支撑座的数量有四个,且四个支撑座分别安装在活动脚的底端,所述活动脚的顶端固定连接在牵引绳的一端,且牵引绳的另一端固定连接在动力转换装置的左侧,所述动力转换装置的内腔固定套接有向外伸出的传动杆,所述传动杆的中部固定连接有相互套接的两块套接环。本发明通过采用活动脚的设计,同时配合活动脚底面支撑座的共同使用,代替了传统滚轮式的移动方式,使得装置能够利用左右往复运动的活动脚来达到装置位移的目的,使得装
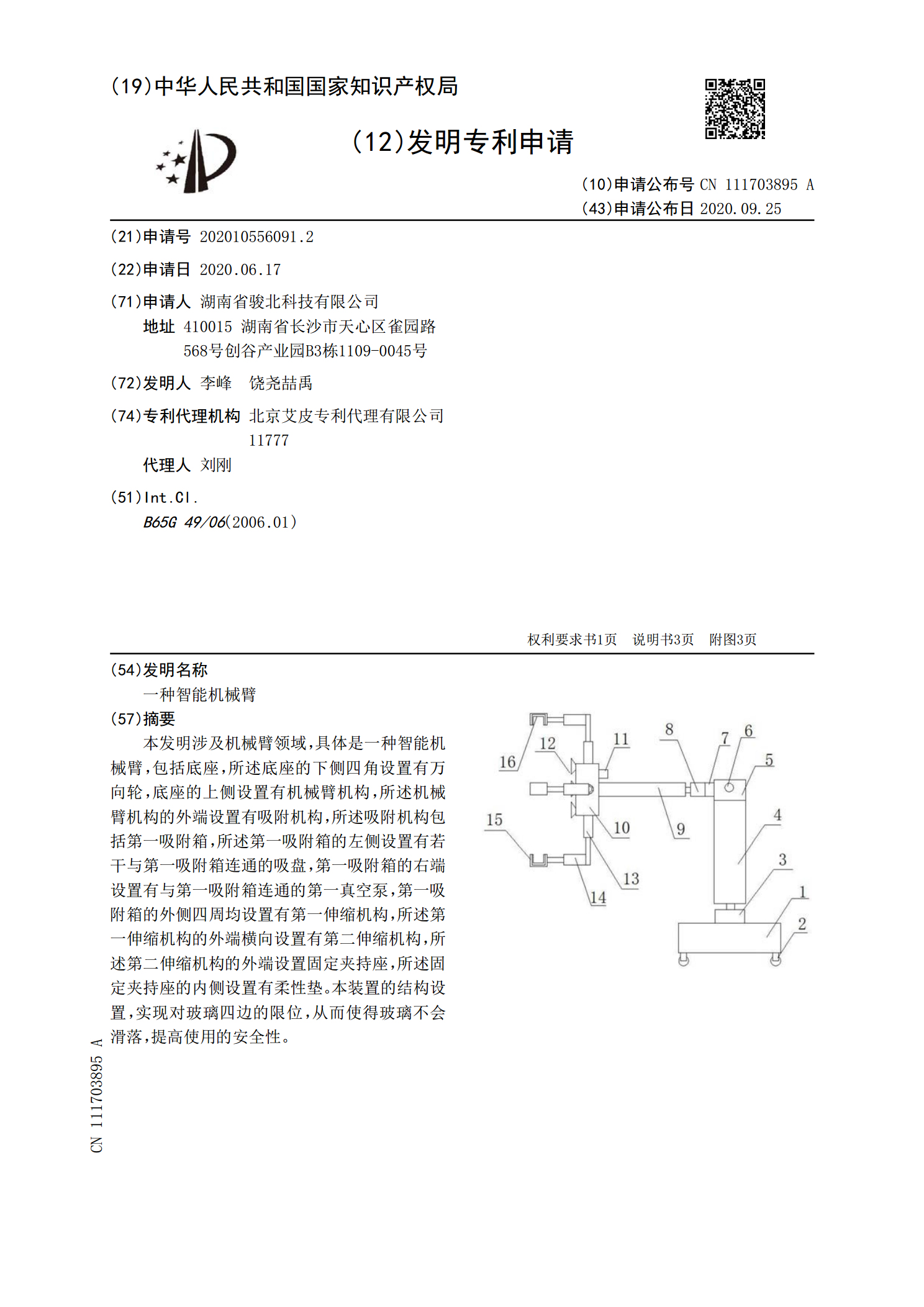
一种智能机械臂.pdf
本发明涉及机械臂领域,具体是一种智能机械臂,包括底座,所述底座的下侧四角设置有万向轮,底座的上侧设置有机械臂机构,所述机械臂机构的外端设置有吸附机构,所述吸附机构包括第一吸附箱,所述第一吸附箱的左侧设置有若干与第一吸附箱连通的吸盘,第一吸附箱的右端设置有与第一吸附箱连通的第一真空泵,第一吸附箱的外侧四周均设置有第一伸缩机构,所述第一伸缩机构的外端横向设置有第二伸缩机构,所述第二伸缩机构的外端设置固定夹持座,所述固定夹持座的内侧设置有柔性垫。本装置的结构设置,实现对玻璃四边的限位,从而使得玻璃不会滑落,提高
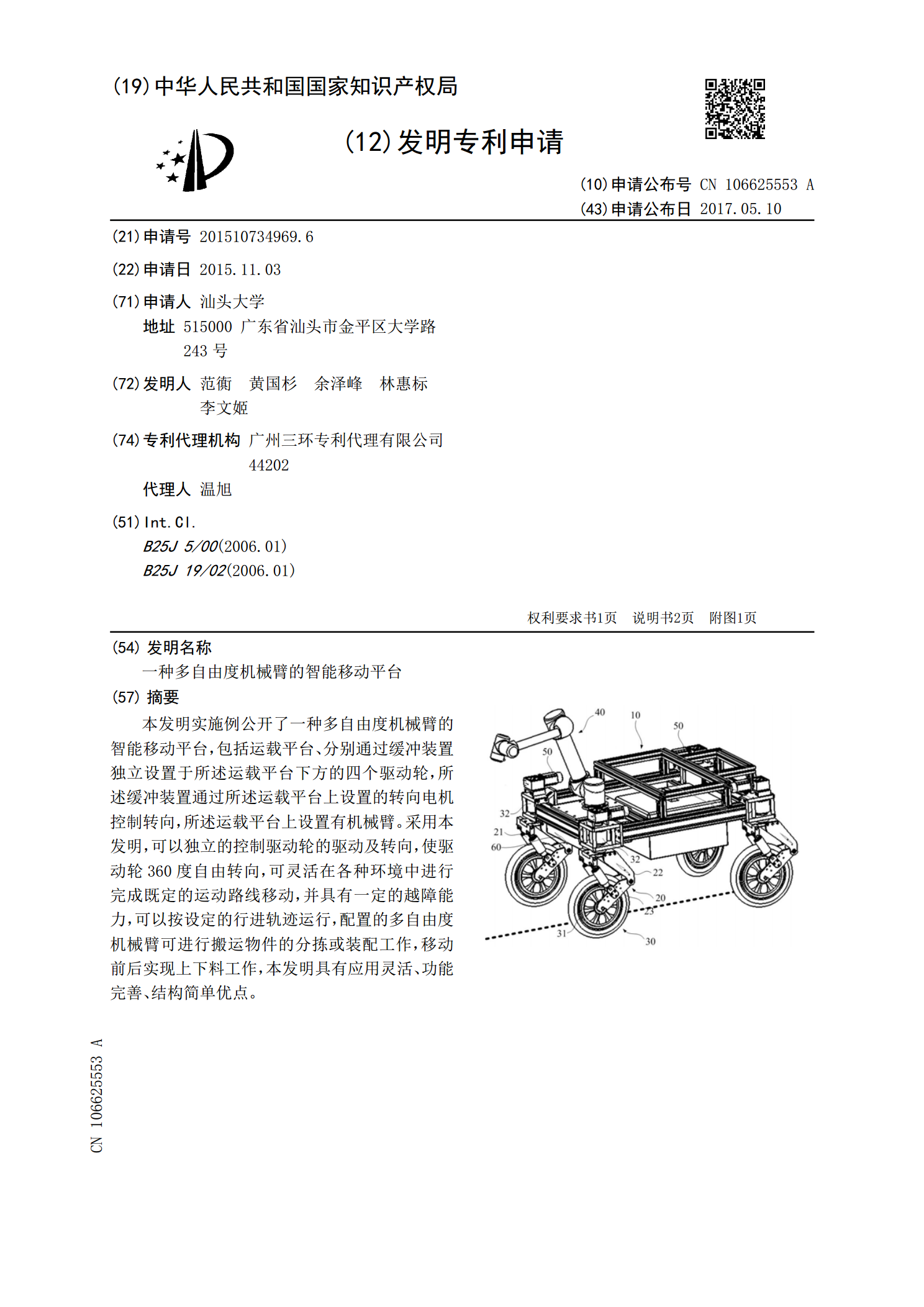
一种多自由度机械臂的智能移动平台.pdf
本发明实施例公开了一种多自由度机械臂的智能移动平台,包括运载平台、分别通过缓冲装置独立设置于所述运载平台下方的四个驱动轮,所述缓冲装置通过所述运载平台上设置的转向电机控制转向,所述运载平台上设置有机械臂。采用本发明,可以独立的控制驱动轮的驱动及转向,使驱动轮360度自由转向,可灵活在各种环境中进行完成既定的运动路线移动,并具有一定的越障能力,可以按设定的行进轨迹运行,配置的多自由度机械臂可进行搬运物件的分拣或装配工作,移动前后实现上下料工作,本发明具有应用灵活、功能完善、结构简单优点。